FPV фристайл. Настройка дрона. Часть 1
В предыдущей серии мы покупали компоненты дрона.
В этом посте ссылки на весь гайд по покупке, а так же гайд по сборке.
Сегодня настраиваем дрон так, чтобы он полетел.
Нет никакого смысла шить версию старше, тем более, что 4.3 настолько крута, что её предлагали назвать 5.0. Для новичка там, как минимум, убрано два геморройных момента в настройке квада с нуля.
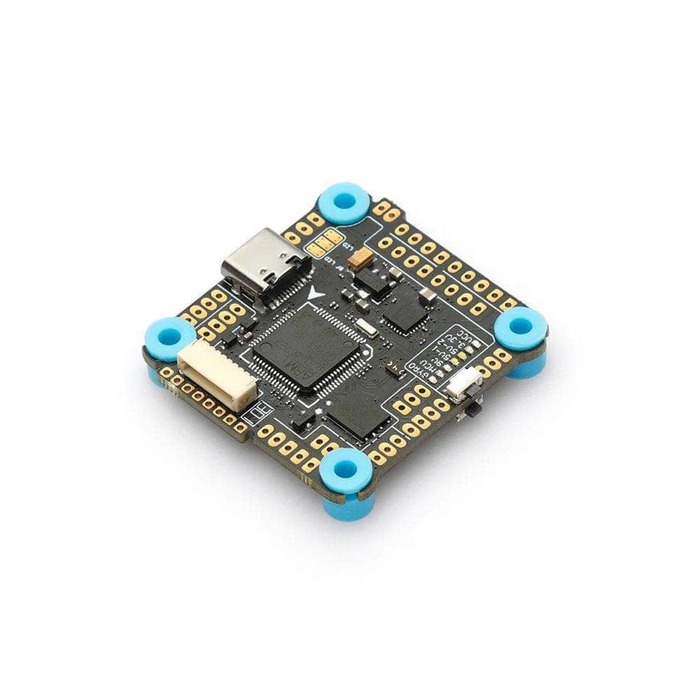
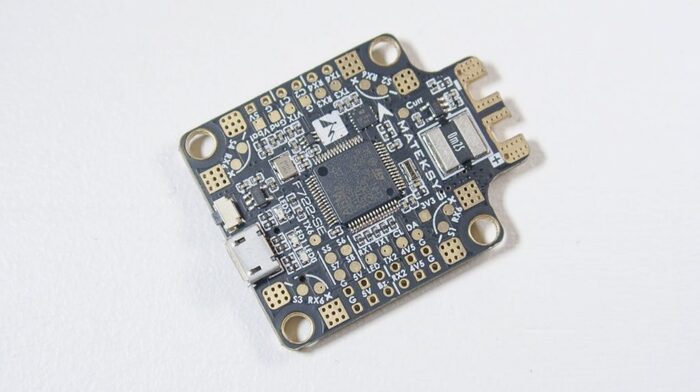
Подключаем полётник по USB к компьютеру и запускаем Betaflight Configurator. Софт увидит COM-порт полётника. Если не увидел - на странице Options взводим переключатель Show all serial devices и перезапускаем BF Configurator. Напоминаю, что батарею подключать не нужно, а пропеллеры вообще лучше держать в соседней комнате. Ставить мы их будем в самый последний момент.
Подключать батарею к не настроенному/не проверенному кваду с пропеллерами опасно!
Сразу жмём Update Firmware, рядом c полем Choose a board жмём кнопку Auto detect, на всякий случай запоминаем что определилось в том поле, внизу жмём Load Firmware [Online], после чего Flash Firmware. После прошивки нажимаем Connect, если автоматом не подключилось.
При первом включении программа выдаст предупреждения, что во-первых нужно применить параметры по-умолчанию для вашей модели полётника. А во-вторых, нужно откалибровать акселерометр и выбрать протокол управления моторам.
С первым просто соглашаемся (кнопка Apply Custom Defaults). Акселерометр калибруется так: кладём контроллер (или квад) на плоскую горизонтальную поверхность и нажимаем кнопку "Calibrate Accelerometer" на странице Setup. Точность нам не важна, акселерометр нужен только в стаб режиме и квад всё равно не будет висеть ровно, его будет вести от ветра. Стаб-режим по началу можно использовать для взлёта и посадки - коротко и в движении.
Протокол моторов отключён по-умолчанию, как своеобразная защита от дурака и отказ от ответственности - чтобы что-то испортить, ты должен сам куда-то влезть и включить.
Сначала, наконец, разберёмся с режимами в которых можно летать. Эти режимы отличаются тем, что мы контролируем с помощью джойстиков (или просто стиков) на аппаратуре.
Глобально режима два: стабилизированный (стаб) и акро (акробатический?).
В стабе стиком по осям питч (тангаж) и ролл (крен) мы контролируем угол наклона квада. Отпустили стик, он вернулся в центр, углы наклоны стали по нулям, квад параллелен земле. По газу в этот момент, очевидно, ситуация может быть разная, от набора высоты до падения.
Отклоняем стик вперёд, квад наклоняется вперёд. Перестаём отклонять - квад перестаёт наклоняться. Упёрли стик в максимум, квад отклонился на максимально настроенный угол и преодолеть его в этом режиме квад не сможет. Если кажется, что для дебилов объясняю - хорошо. Дальше будет сложнее. Этот режим в Betaflight называется Angle.
В акро режиме стиком мы контролируем скорость вращения по заданной оси. То есть, сдвинули стик - вращение началось, вернули в центр вращение прекратилось, а угол наклона остался. Чтобы убрать угол, и выставить опять горизонт, нам нужно начать вращение в противоположную сторону отклонением стика и прекратить в нужный момент его возвратом в центр. Углом отклонения стика регулируется скорость вращения. Если подумать, как управляется самолёт своими отклоняющимися плоскостями на крыле и хвосте, которые напрямую заведены тягами на ручку управления (не силён в терминологии), то, возможно, станет понятнее. Этот режим в Betaflight называется Acro. Но это слово вы в интерфейсе Betaflight Configurator не увидите, потому что этот режим работает тогда, когда не выбран ни один из других.
Помимо названных режимов есть и другие, они - варианты глобальных и о них позже.
Сначала я пробегусь по настройкам, которые необходимо сделать, чтобы квад полетел и было удобно с ним обращаться.
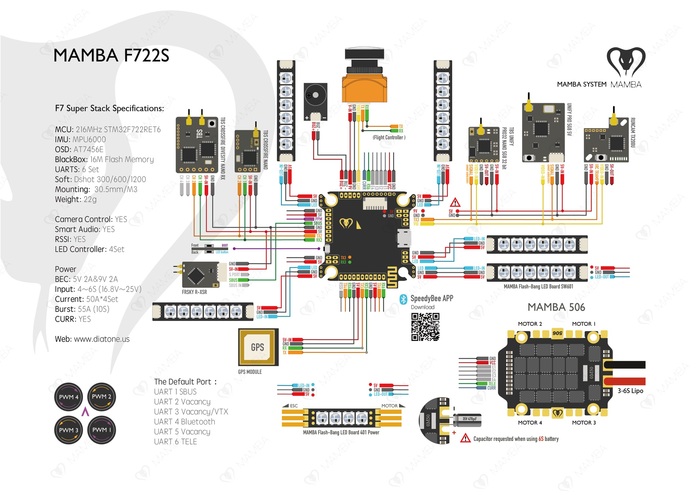
На странице Ports мы обязательно указываем на каком UART у нас приёмник, для этого напротив него включаем SerialRX. И включаем Peripherals для порта на котором у нас видеопередатчик, в зависимости от поддерживаемого протокола это опция VTX (IRC Tramp) или VTX (SmartAudio). На каждой странице, после настройки не забываем нажимать Save или Save and Reboot. Страница Ports известна тем, что может не сохранить изменения с первого раза, поэтому проверяем дважды.

Вообще, настройки в Betaflight объединены по функциям, а не по приоритетам, поэтому рядом могут быть две настройки ничем друг от друга не отличающиеся визуально, но одна критически важна для полёта, а эффект от второй нужно долго и внимательно искать в поведении квада. Поэтому у начинающего будет масса вопросов, как обычно, я призываю читателя задавать их, например, мне в телеге.
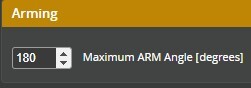
Дальше страница Configuration. Тут критический параметр - Maximum ARM Angle. Настраивает максимальный угол на который квад может быть отклонен, больше которого запрещён арм (то есть включение моторов). Если проще, то криво стоящий квад нельзя включить. Но нам, фристайлерам, это очень не подходит, потому что в ситуации, когда квад повис на дереве, очень помогает покрутить пропеллерами, чтобы квад освободить. Так что ставим этот параметр в 180 градусов.
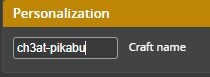
Вписываем название нашего квада или свой ник в поле Craft Name. Позже мы настроим отображение этого имени на экране и так мы будем знать, что в очках видим свою картинку, а не чужую.
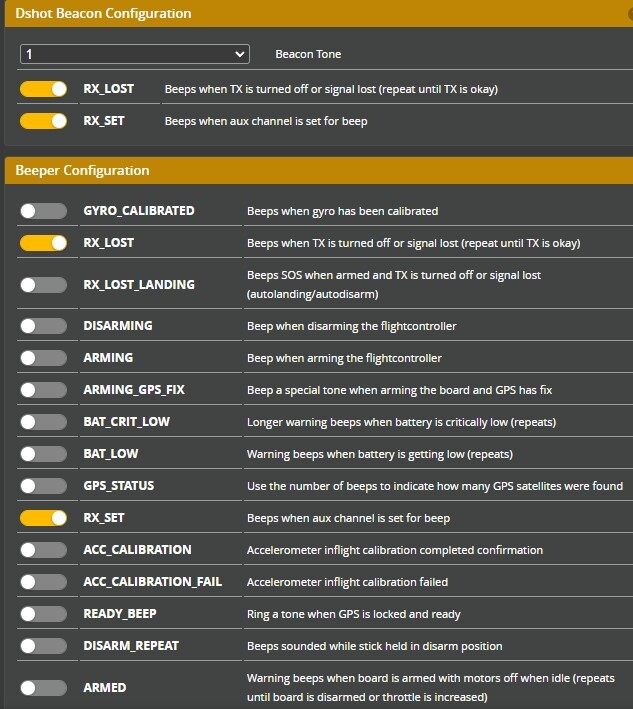
И настройка пищания. Квад может пищать моторами и отдельным динамиком, если мы его запаяли (в моём гайде - нет). Dshot Beacon Configuration (писк моторами) - включаем обе опции, в Beeper Configuration (писк динамиком) выключаем всё, кроме тех же RX_SET и RX_LOSS. Таким образом у нас квад будет пищать моторами и динамиком только в случае потери связи с аппаратурой (RX_LOSS) или когда мы сами захотим, настроив нужный режим на тумблер (RX_SET).
Раздел Board and Sensor Alignment понадобится тем, кто установил полётник не по стрелке, за подробностями в телегу.
Следующая страница - Power and Battery. Тут можно указать ёмкость батареи, потом настроим удобное отображение расхода.

Страница Failsafe. По умолчанию, квад просто отключает моторы в случае потери связи, и это самый безопасный для людей вариант. Экспериментировать с автопосадкой и тем более возвращением домой (а тут этот режим правильно было бы назвать "Поруби пилота") рекомендую только после опыта полётов и падений. Возможно, ничего менять не захочется.
На страницах Presets и PID Tuning ничего критичного нет - их пока пропустим. А вот для настроек на странице Receiver нам нужен привязанный к аппаратуре приёмник. Этим мы займёмся в следующей серии.