

FPV Фристайл. RPM filtering
Для случайных читателей: я в серии своих постов "научил" читателя выбирать, собирать настраивать и управлять фристайл дроном и теперь продолжаю углубляться в тонкости этого хобби. Предполагается, что ваши знания ограничиваются только моими постами.
Сегодня настроим RPM filtering - фильтрацию вибраций основанную на оборотах двигателя. Эта функция эффективно улучшает качество полёта (а c ним и картинку) так как динамически подстраивается под основной источник вибраций - вращение моторов.
Для выполнения этой задачи, полётник должен знать текущее значение RPM (обороты в минуту) каждого мотора. Эту функцию добавили в прошивку регулятора относительно недавно, поэтому алгоритм выглядит так:
1. Прошить свежую версию BLHeli_32 (или убедиться, что свежая уже прошита).
2. Включить двунаправленный протокол управления моторами (Bidirectional DShot).
3. Убедиться, что считывается верное значение RPM.
4. Включить RPM фильтрацию в полётном контроллере.
5. Отключить более простой фильтр.
Теперь по пунктам подробнее.
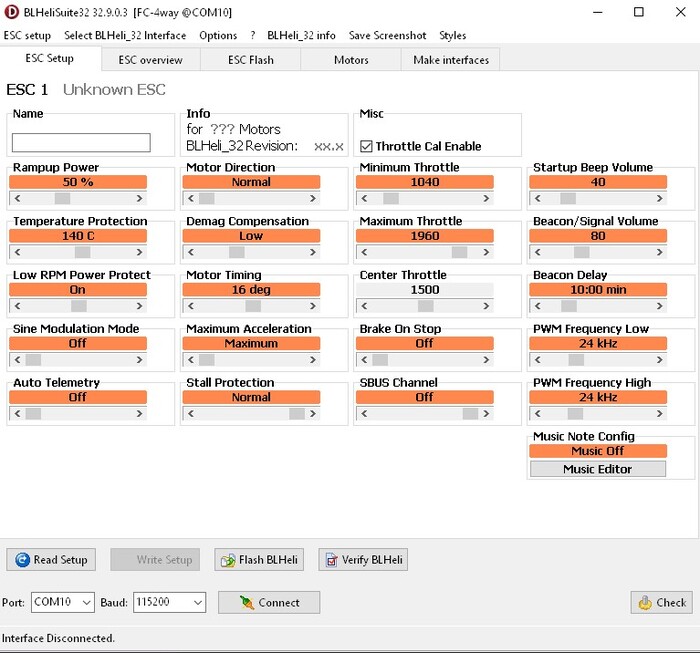
1. Прошить регулятор можно только когда он соединён с полётником и на него подано питание, поэтому лучше это делать на собранном дроне. Нужен софт BLHeli_32 Suite. Подключаем полётник к компу, а батарею к регулятору (квад без пропеллеров!). Нажимаем Connect и Flash BLHeli.
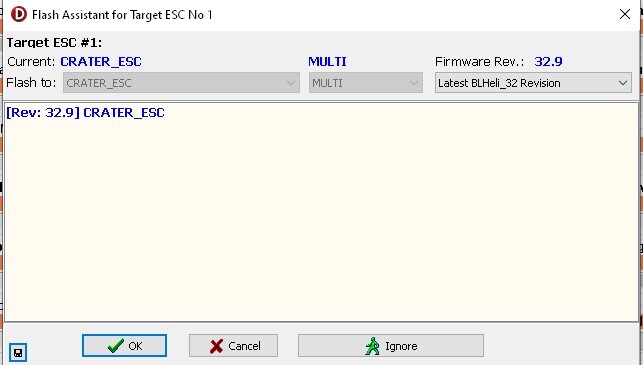
Выбираем последнюю версию и жмём OK.
Закрываем BLHeli32 Suite и отключаем батарею.
2. Запускаем Betaflight Configurator и на вкладке Motors включаем Bidirectional DShot. Для правильной работы полётнику нужно знать сколько магнитов в моторе, но значение по-умолчанию работает для абсолютного большинства моторов подходящих для нашего 5-дюймового квада. Если вы настраиваете что-то другое, лучше по моим постам этого не делать.

3. Дальше можно подключить батарею и ползунком запускать каждый мотор. В поле R: должны появиться обороты, а поле E: (ошибки) должно оставаться на нуле. Отключаем батарею.
4. Дальше вкладка PID Tuning и раздел Filter Settings, там включаем Gyro RPM Filter.

При включении будет напоминание, что нужно настроить всё, что мы настроили и автоматически применится настройка фильтра.
5. Теперь можно отключить фильтр Gyro Lowpass 1 (или это произойдёт автоматически)

Всё, теперь фильтрация будет динамической и зависеть от оборотов двигателя.
Чем больше фильтров, тем больше времени нужно полётнику на реакцию, тем менее "отзывчив" квад, однако без фильтров реакция на вибрации заставит слишком часто и интенсивно реагировать моторами на ситуацию и приведёт к большому расходу, шуму и нагреву моторов. А иногда и к "положительной обратной связи" - ситуации, когда слишком резкие корректировки приводят к ухудшению ситуации и к ещё более резким корректировкам. Поэтому экспериментировать с фильтрами нужно со знанием дела. Только что настроенный фильтр - один из немногих полезных и безопасных настроек фильтров, который улучшает поведение и раскрывает потенциал микроконтроллеров на борту.
Как обычно телега для всех вопросов.







































