


Колхозная автоматизация
Давненько я не писал технических постов, булки расслабил так сказать.
Сидел я давеча без денег и с достаточным количеством времени, короче отпуск был у меня. И тут на посиделках с братом он мне говорит, что у его знакомых есть проблема с производством ручек для резцов по дереву, примерно вот таких.


Проблема заключалась в том, что делали они такие ручки вручную по шаблонам с помощью ручного фрезера. А как известно, наш биологический вид надёжностью не отличается, оттого была жуткая текучка кадров. А ведь каждого кадра нужно обучить, чтобы брак не порол. А может они просто платили мало, история умалчивает. Вообщем проблема есть, нужно решение.
Я прямо на месте предложил брату позвонить этому чуваку и предложить автоматизацию процесса. Чтобы долго не тянуть с рассказом, в общем он согласился и я приступил к работе.
Первым делом я отказался от идеи создавать абсолютно новый станок конкретно для производства этих ручек, т.к. это вышло бы необоснованно дорого и в случае пропажи спроса на них, станок можно было бы просто выкинуть.
Заказчик как раз собирался покупать ЧПУ фрезерный станок по дереву, поэтому ему было предложено разработать приспособу, на техническом языке оснастку, которая бы автоматически подавала,зажимала и сверлила центровое отверстие в занотовке, а после обработки автоматически сбрасывала почти готовую ручку в сборник.
Стоило бы это на порядок дешевле и в случае отказа от этих ручек приспособу можно было бы выкинуть или переделать под что-нибудь другое. Так и было утверждено.
Приступая к разработке, я прекрасно понимал, что денег за разработку и производство я запросил катастрофически мало, но на большее, как на эксперимент, заказчик отказывался давать. А денег, я напомню у меня особо не водилось. Поэтому проектировать, заниматься электрикой, программировать, заказывать детали и собирать абсолютно все пришлось самому. Ну немного помогал брат, спасибо ему большое.
В общем три месяца у меня ушло на проектирование всей механики, программирование и электрики. Три месяца кажется довольно нормальным сроком для этого, но у меня уже закончился отпуск и я занимался этим только после основной работы, благо работал я там до 3х дня.
Ещё через две-три недели, когда начали приходить готовые детали я приступил к сборке.

Ещё походу проектирования электрики и программирования, а я нифига не электрик и не программист, я второй раз понял, что взял очень мало денег, но отступать уже было некуда, так что я продолжил. Тем более, что проект был очень мне интересен в качестве опыта, что в дальнейшем сыграло очень хорошую службу.

После долгих часов сборки, доводки программы и электрики было почти готово это одоробало.

А теперь немного о том, почему колхозная автоматизация. Денег на проект было очень мало, поэтому приходилось экономить даже на сварке, в том смысле, что учился варить я именно на этом проекте. И это я уже не говорю о контроллере, в качестве которой выступает Ардуино.
Вообщем финальный результат получился примерно таким:
Я знаю что видео снято пьяным оператор, после грибов без двух рук))
К сожалению фото и видео работы на станке у меня нет.
Много ещё чего хочется сказать про этот проект, но и так уже такая простыня получилась, что самому страшно, так что держите котика)

Показать полностью
5
1

Было - стало
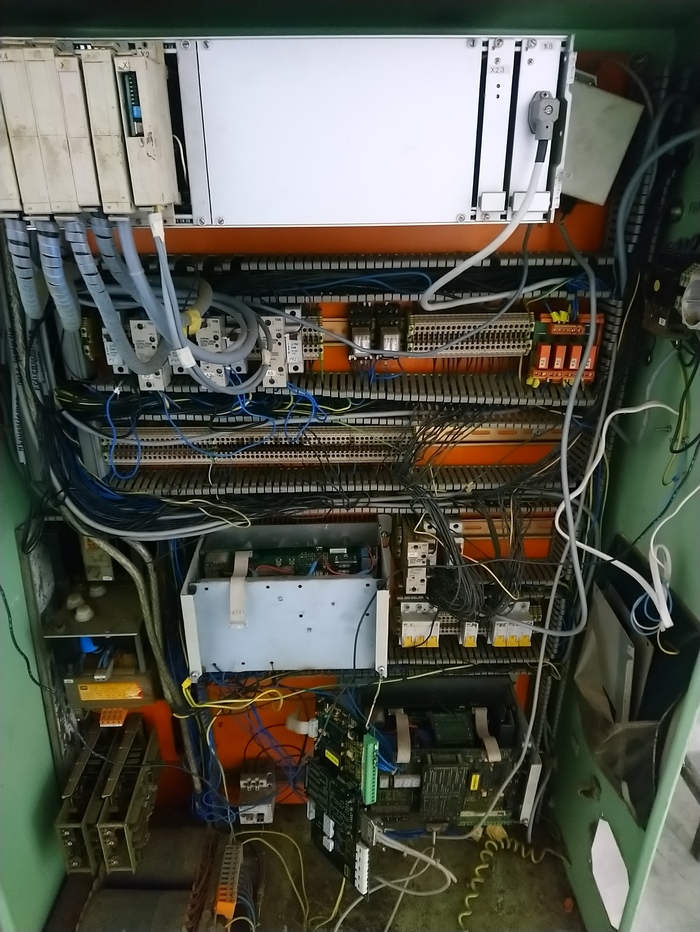
Электрический щит управления вертикальной упаковочной машиной, "хастамат", немецкого производства 1990 года. Был в рабочем состоянии, но в веду того, что один преобразователь частоты как два современных, трансформаторы по 5кг и плк шириной с щит, было решено собрать новый.

Если кому интересно, могу потом выложить операторскую панель, 3д модели и работу данной машины
Показать полностью
2
Я оператор колл центра, мне нужна ваша помощь
Привет всем пикабушникам, я студент и работаю я оператором в колл центре, перейду сразу у сути вопроса, за сутки поступает около 150 входящих звонков, и в начале каждого нового разговора мне нужно произносить одинаковую информацию, "оператор федеральной справочной службы .... здравствуйте, скажите пожалуйста из какого города вы звоните."
Вообщем вот, может знает кто как можно забиндить данный текст так, что бы при нажатии на клавишу запускалась данная запись, ну вообщем вы меня поняли, заранее, буду очень благодарен тем кто мне поможет, спасибо за внимание 😊
Про системы автоматизации экскаваторов
В одном посте (ссылка будет чуть ниже) я неосторожно обмолвилась о том, что работаю тестировщиком ПО в компании, производящей системы автоматизации для экскаваторов и другой строительной техники. Вот сам пост: "Моя любимая игра на работе"
Даже не представляла, что это может вызвать такой ажиотаж! Учитывая, что на меня подписалось около 30 человек (благодарю за внимание к моей скромной персоне), считаю своим долгом запилить пост, в котором расскажу про систему важную, с моей точки зрения, информацию и с удовольствием отвечу на вопросы, если таковые имеются. Сразу попрошу прощения за мои, возможно, кривые формулировки! Я тестирую систему на английскоми и финском языках и многими терминами на русском, к сожалению, не владею. Если найдутся добрые люди, которые помогут сказать правильно, я буду слать вам лучики добра и благодарности прямо в карму)
Итак, приступим.
Компания, в которой я работаю (далее по тексту "Мы"), производит 3 варианта систем автоматизации. Я расскажу про флагман-версию.
Это 3D система, которая состоит из:
-2х GPS-антенн для определения местоположения
-датчиков на каждой подвижной части машины
-тачскрин дисплея
-доп. LED-дисплея индикатора приближения ковша к целевому уровню
-компьютера, который обрабатывает информацию с датчиков.
Как это все работает?
Местоположение машины на карте определяется с помощью GPS приёмника и корректируется по 15 спутникам. Положение ковша определяется на основании расчётов движения каждого датчика по осям X, Y, Z. Установку и калибровку системы производят только наши специалисты. При правильной калибровке точность системы достигает 1-2 мм. В систему можно сохранять разные ковши, если это необходимо (есть квик-каплер). Калибровку ковша необходимо производить 1 раз в неделю в виду его естественного износа.
Когда система готова к работе, оператор загружает и открывает цифровой проект, который заранее делают инженеры в подходящем формате, в режиме картинки. Мы поддерживаем идею открытого софта, поэтому приложение адаптирован под работу с любым из существующих форматов цифровых карт. Оператор видит на экране план, опорные точки и целевой уровень, то есть то, как это должно выглядеть по окончанию работ, даже если сейчас по факту это машина в чистом поле. Картинка выгдядит весьма схематично, линии и точки. В центре экрана сам экскаватор, в нижней части вид ковша в "профиль и анфас", под ним настраиваем приборная панель, в которой можно одновременно наблюдать любые цифры (координаты, градус наклона, расстояние до цели и многое другое, что закажешь). Чтобы выбрать текущую цель, оператор должен просто нажать на неё на экране. Водя пальцем по экрану, оператор может вращать карту объекта в 3D для удобства захыатывания цели. Далее оператор видит расстояние до цели по оси Х и У и двигается к ней (едет, копает и тд). При приближении к цели оператор услышит заблаговременно (заблаговременность настраивается по собственному желанию) звуковой сигнал и увидит световую индикация на схематичном LED-дисплее. После нужно постоянно смотреть на экран и корректировать положение ковша по полосочке на экране. Когда работа над текущей целью окончена, приступаем к следующей. Для избежания нагромождения на экране, проект делится на слои. Модели (цели) привязаны к ним по высоте. Оператор сам выбирает, какой слой показать/скрыть.
Оператор может сам добавлять модели в проект, вбивая координаты вручную или производят измерения ковшом. Можно нарисовать точку, линию, прямую площадку, уклон, прямой траншейный профиль, профиль с поворотами и большим количеством разных уклонов. Проекты загружаются в систему из интернета в режиме онлайн. Так же, если менеджер проекта вносит изменения, то оператор получает информацию о них на экран и подтверждает загрузку изменений. Информация продвижения проекта (тут, возможно, несу херню. По-английски as-built data) тоже мгновенно сохраняется в облако и синхронизируется на другие машины на объекте, которые работают над этим проектом.
У нас есть служба ТП, которая на связи с клиентами онлайн. При необходимости ТП может зайти в систему на объекте удалённо и помочь с настройками или объяснить, если чего не понятно. Все критические настройки скрыты от клиента, во избежание) Приложение системы устанавливается на Windows 10.
На этом моя фантазия исчерпана) задавайте вопросы, если они есть)
Фоточки самого приложения постараюсь добавить чуть позже в комменты.
Показать полностью

Моя работа

Показать полностью
1

Запускаем биогазовую установку.






Вот так работаем.
Все работает на шнайдеровском софте (IntouchME) и железе (Modicon M340).




А так отдыхаем.
Культурно-массовые мероприятия, так сказать.
Мукачево.
Показать полностью
9

Вы хотите головоломок?
Их есть у нас! Красивая карта, целых три уровня и много жителей, которых надо осчастливить быстрым интернетом. Для этого придется немножко подумать, но оно того стоит: ведь тем, кто дойдет до конца, выдадим красивую награду в профиль!
За что я люблю свою работу.
Доброго времени суток, господа. Являюсь читателем Пикабу уже долгое время, а вот на свой первый пост только сподобился. И в своем первом посте хотел рассказать немного о своей, на мой взгляд, интересной работе. Работаю я инженером АСУ-ТП (автоматизированные системы управления технологическим процессом) в небольшой, частной фирме, что накладывает свою специфику. Фирма действительно небольшая, в годы расцвета штат был чуть больше 140 человек, сейчас же около 60. Специфика заключается в том, что в моем отделе всего 6 человек и сама суть должности инженер за счёт этого немного искажается. Вот как, на ваш взгляд, выглядит инженер? На картинках в интернете белая рубашка и сопутствующее. В реальности такое встречается крайне редко. Обычно —рабочая одежда, но чистая и отглаженная. А как выгляжу я?

В силу того, что штат у фирмы небольшой приходится быть универсалом. Сегодня ты сидишь за ноутбуком и занимаешься проектными работами, через неделю занимаешься закупками оборудования на свой же проект, через две недели влезаешь в рабочую робу с песнями и плясками занимаешься монтажом того, что напроектировал. Проходит монтаж и обратно за ноутбук - программирование контроллеров. А ведь впереди еще пуско-наладочные работы, подготовка технической документации и сдача инспекций. И мне это очень нравится. Ты видишь не только на бумаге, но и в живую все оборудование. Собираешь его. А когда махина весом в 35 тон под магией строчек твоего кода оживает и начинает двигаться по алгоритму заложенному тобой (правда не всегда с первого раза =D) начинаешь верить в небольшие чудеса.

Для примера: на фото самоходная конусная дробилка. Её задача из карьерного камня размером с ковш экскаватора делать щебень размером от 5 до 20 миллиметров. Когда то управлялась немецким контроллером с немецкими датчиками. Но немцы дорогие и наших условиях почему то долго не живут. Заказчик не захотел отдавать баснословные деньги за восстановление немецкой электроники и просил заменить на более дешевую российскую (импортозамещение же)). Как это происходило, и какие сюрпризы встретились на этом пути тема для отдельного поста, маленький пример работы ниже. Это её первый тестовый запуск еще на маленьком сырье.

За качество фото и видео не ругайте сильно - снимал на мультиметр. Если будет интересна тема промышленной автоматики - пишите, готов рассказать и про объекты и про оборудование и про заказчиков =). На сим позвольте откланяться, и так простыня текста с замашками на саморекламу
Показать полностью
3