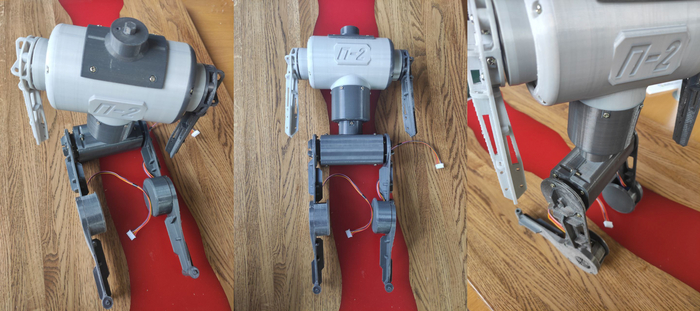
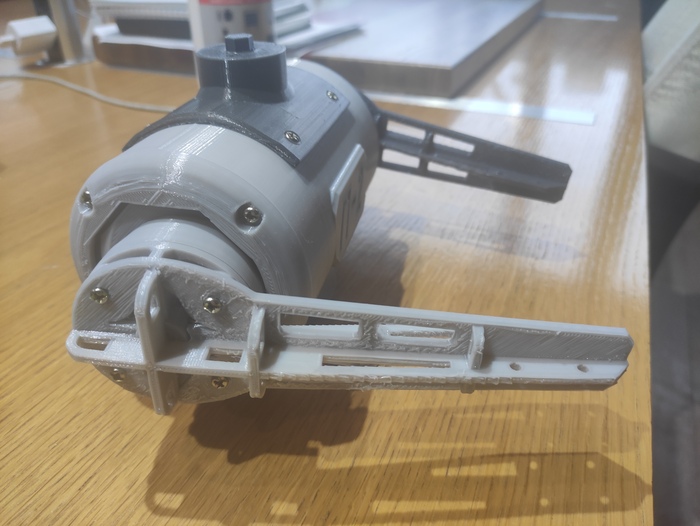
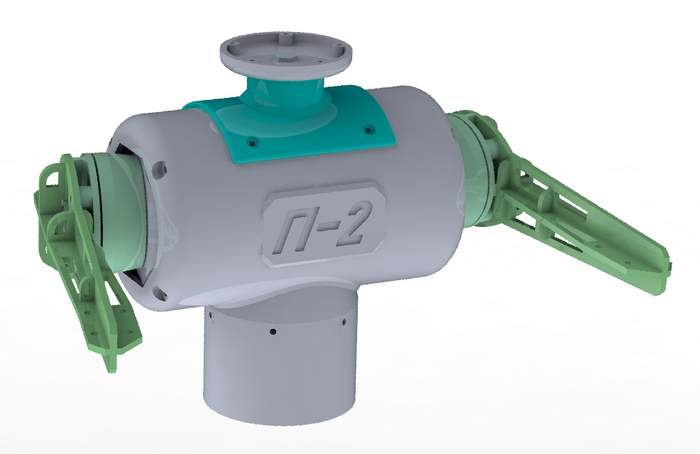
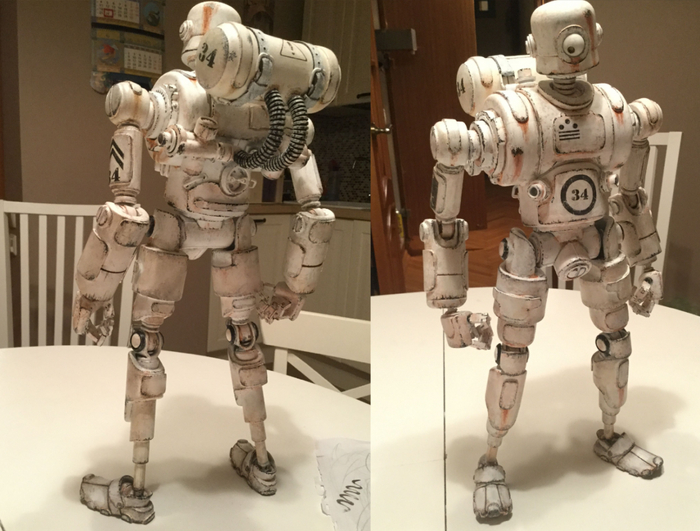
Сборка Робота П-2. Итоги и выводы

Вот это по своей сути и является Прототип-2
Как уже говорил не однократно, но повторю для тех кто не знает
И отвечу сразу на вопрос который я часто слышу:
Какая цель у этого робота?
Я ни когда не проектировал роботов и целью проектирования этого робота были:
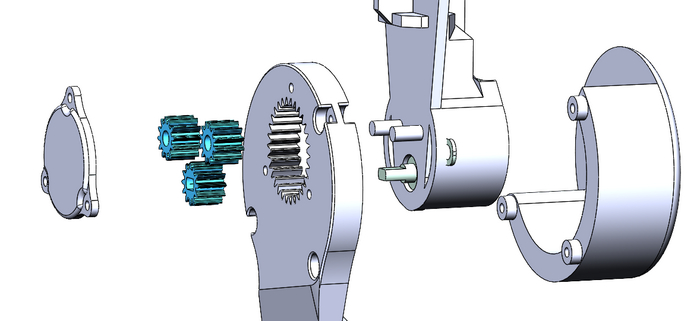
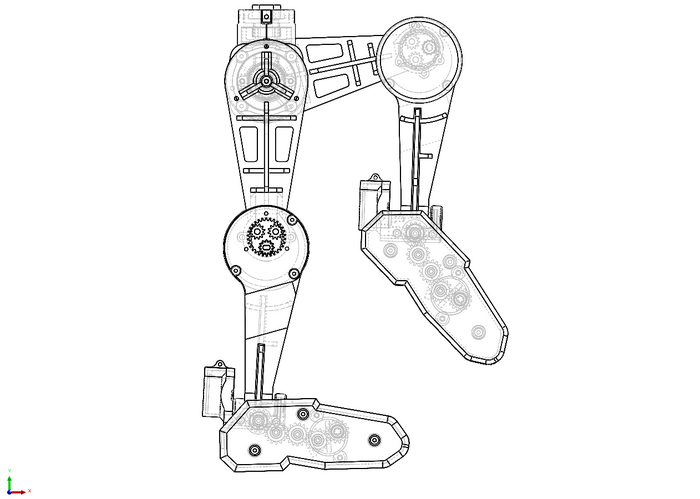
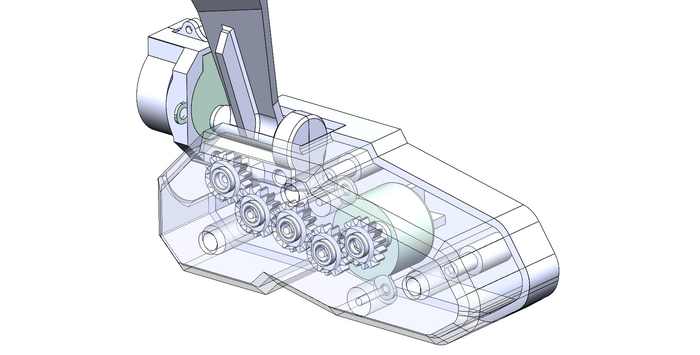
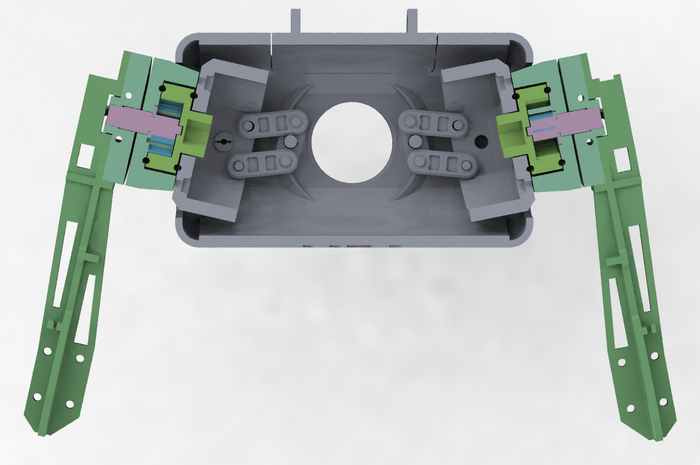
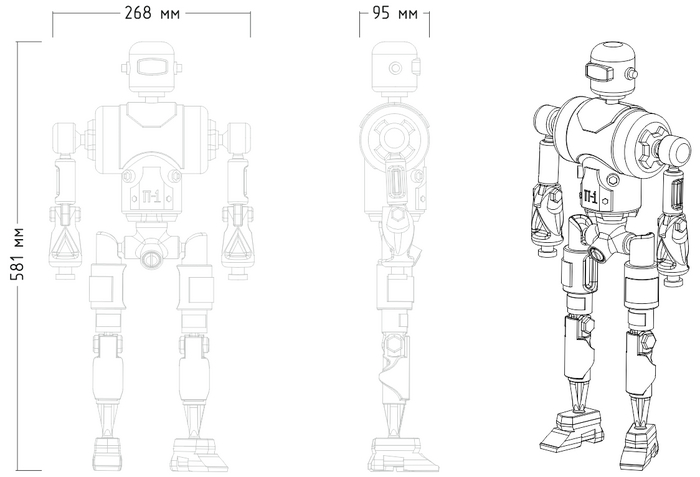
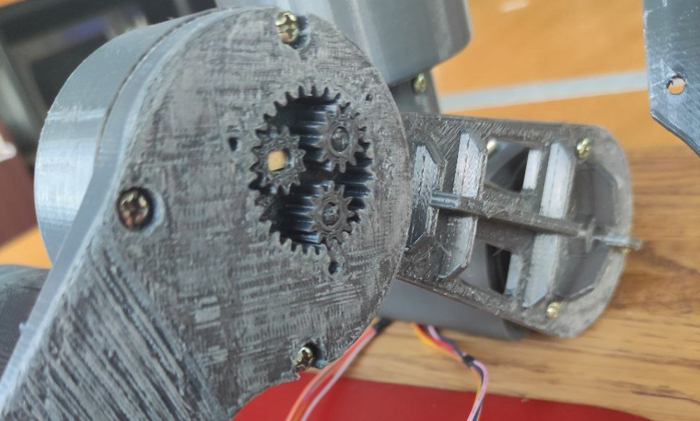
Придумать кинематику двуного робота, придумать различные узлы сгибов
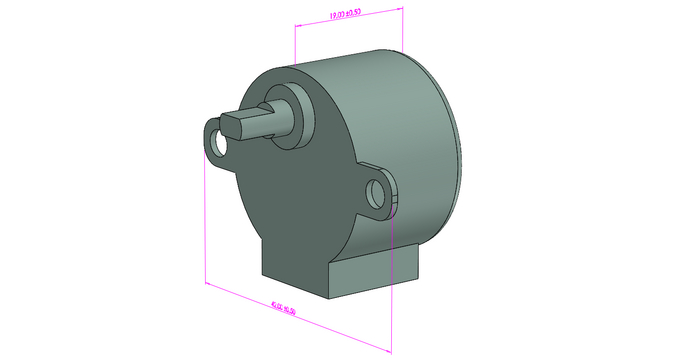
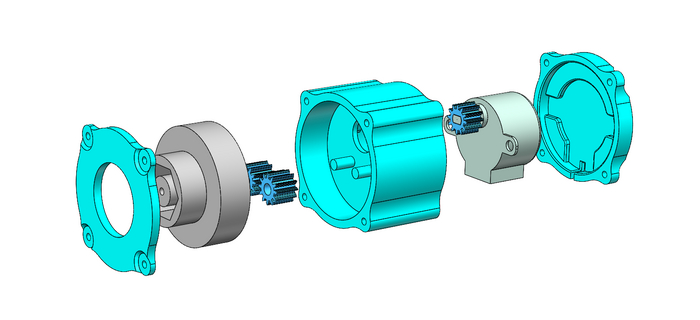
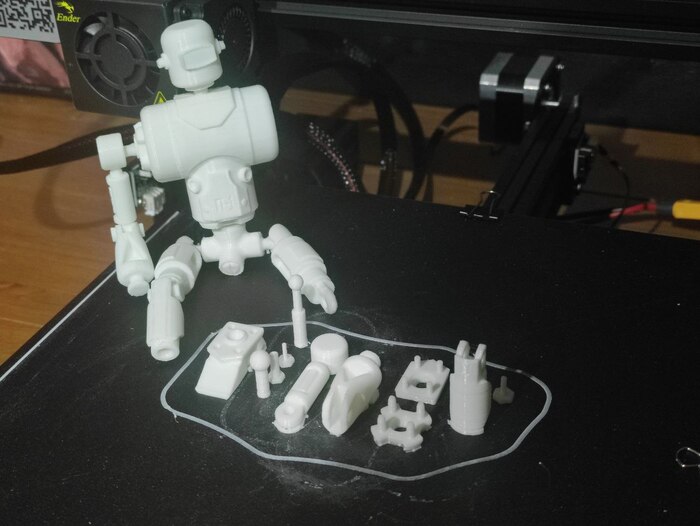
Потом распечатать его, вставить в него моторчики
А затем программировать его логику.
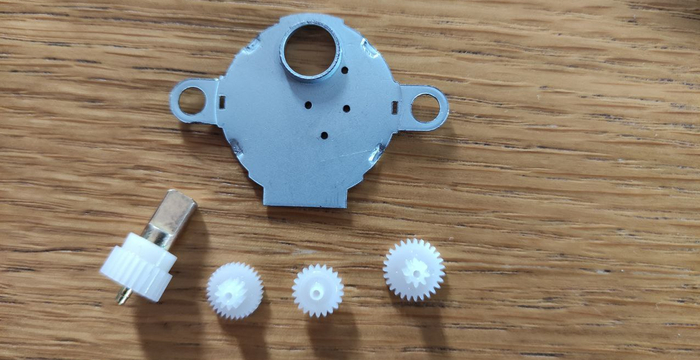
Но, когда я подключил все моторчики, оказалось, что они слабые
5 вольт платы ардуино не хватало запитать одновременно 4 мотора
Взял аккумулятор 12 вольт. Мощностью значительно выросла
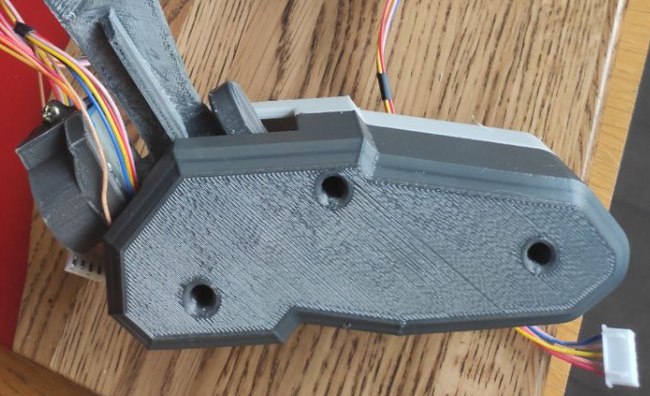
Бедро и колено робота передвигались вполне уверено
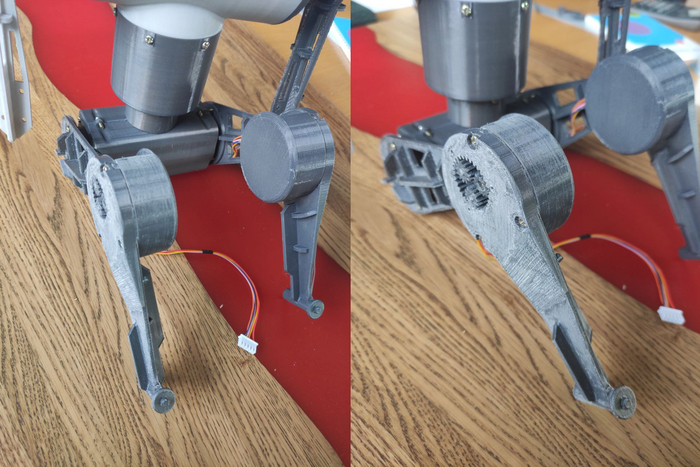
Но вот ступня оказалась слабым узлом
Мощности моторов не хватало что бы держать массу робота
Так что тут надо будет подумать над другими решениями
Скорее всего нужны моторы помощнее.
Что касаемо программы управления,
То тут есть куча нюансов в которых надо разбираться
На ардуино по сути можно программировать только заданную логику
Сделать самостоятельного робота не получится
От сюда возникло понимание что логику робота надо писать на питоне
Но как это делать, интернет ответов не дал...

Вывод же нужен какой-то...
Некоторые технические решения в этом роботе будут применяться в следующих моделях
Уже есть идеи по улучшению и усложнению механизмов
Осталось только решить вопрос с написанием логики.