Бывают задачи, когда нужно последовательно подвигать механизм вверх-вниз или влево-вправо (Например механизм протруски в прессе). Или движения тележки.
В LD программе есть научное название такой схемы - называется мультивибратор.
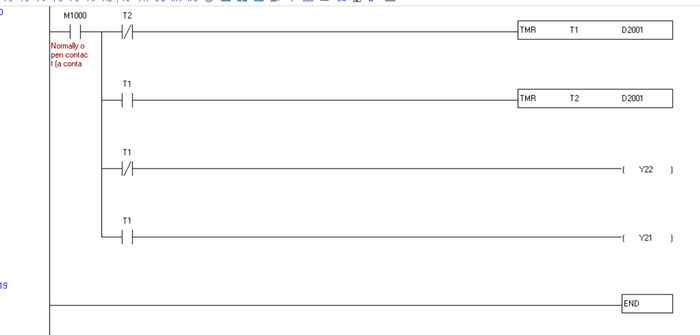
Реализация для ПЛК Delta.
Ставим два таймера, один с замкнутым выходом, другой с разомкнутым. Данный пример отображает работу гидравлического механизма с двумя катушками Y21 и Y22.
В параметре D2001 выставляете необходимую задержку времени. Этот же параметр можно вывести на панель оператора, любую, где есть драйвер этого ПЛК.
Уважаемые коллеги, с удовольствием делимся экскурсом в прошлое отечественной автоматизации и публикуем историю, рассказанную Михаилом Непомниным – начальником КБ автоматизации ЭПО «Сигнал» о создании одних из первых отечественных аппаратных и программных средств АСУ ТП.
В уже далеком 1988 году я после окончания университета и 5 лет работы в элитном цехе регулировщиком РЭА я перешел в ОМА (отдел механизации и автоматизации), в новое бюро автоматизации поверочных работ (КБ АПР сокращенно). Часть инженеров местного политехнического института калымила, внедряя нам автоматизацию проверки выпускаемой продукции. А мы были у них на подхвате и учились уму разуму или постигали тонкости автоматизации.
Продукцией же были специальные датчики давления, выпускаемые для военных – они производились двух типов. Нас этом я заканчиваю рассказ про сами датчики, поскольку это секретная продукция. А вот автоматизированные рабочие места для их проверки при выпуске секретом не являются. Про них я могу говорить свободно. Тем более, что АРМы сейчас уже не работают на выпуске, заменены на новую модификацию. Так что я даже коммерческую тайну не выдаю.
И так, в конце 1987 года создалось КБ, а в апреле 1988 года я перешел туда инженером-программистом. Вроде бы так моя должность называлась. КБ было преимущественно молодежное. Руководил им грамотный товарищ, который через полгода стал замом Главного инженера, а я стал начальником КБ.
Политех разрабатывал нам АРМы проверки и один АРМ «центральный процессор» для управления процессом и ведения архивов, как на бумажном носителе, так и в электронном виде. Женская часть КБ разбиралась с КД по проверки и помогала в языке высокого уровня ТурбоБейсик сочинять политеховцам программу центрального процессора. Вернее, разрабатывали прогу девчонки при постоянном контроле и подсказке работников политеха. А мужеска часть КБ, на тех же условиях разрабатывала в ассемблере программу для контроллера К1-20 микропроцессорной 580-й серии микросхем.
И не смейтесь над нами. Никаких Виндоус тогда еще не было, ТурбоБейсик был крутой язык и в ассемблере было не западло писать программу. Напомню, что это был далекий 1988-й год. Мы планировали писать программу центрального процессора на отечественной ЭВМ ДВК, но потом разжились IBM-ками. И если на ДВКшках мы в редкие минуты отдыха гоняли компьютерную игру Тетрис, то на IBMках начали кроме игр серьезно изучать языки высокого уровня типа Турбо- и Квикбейсика.
Поскольку я в университете прослушал курс лекций программирования на Алголе и Фортране, а также прошел практику по программированию, я тоже начал вместе с дамами нашего КБ программировать на Бейсике. А не осваивал один ассемблер для К1-20. Изучение Бейсика мне кстати очень пригодилось в дальнейшем. Ну об этом потом. А пока расскажу о составе и характеристиках контроллера К1-20. Это его типовое что ли название. Реально у нас были две опции контроллеров с шифрами МС2702 и МС2721.
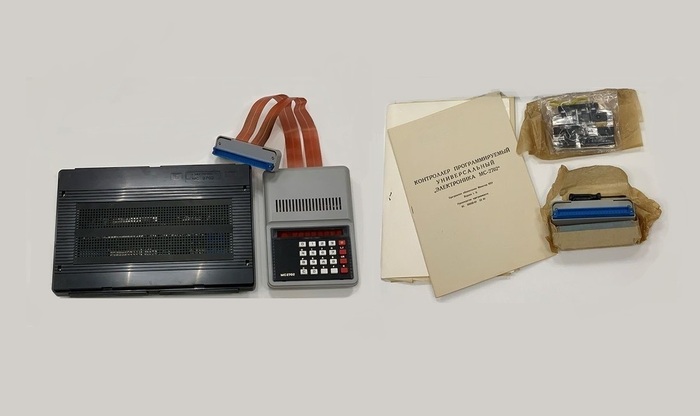
На рисунках видно, чем они отличались друг от друга, но в общем и целом контроллеры были почти одинаковы.
Контроллер МС2721 с пультом
Контроллер МС2102 с пультом
Питание 5В было мощное – 3А. Контроллер грелся, но работал. Скажу, что мы успели поставить три АРМа в одном цехе и один в другом. Работа кипела. Собирались внедрять программу «центральный процессор» и увеличивать количество АРМ и диапазон охвата. Но (как часто в жизнь вмешивается это чертово «Но») наступила конверсия и датчики стали нужны в значительно меньших количествах, а с ними не стала нужна и наша автоматизация.
Хотел привести краткие технические характеристики контроллеров, но у меня документации давно нет. А в интернете что-то не нашел. Поэтому пишу, что помню.
Эти контроллеры содержали полноценные микропроцессорные комплекты 580-й серии. С контроллером прямого доступа к памяти, контроллерами прерываний и последовательного интерфейса. Разница была в конструкции пульта и количестве разъемов.
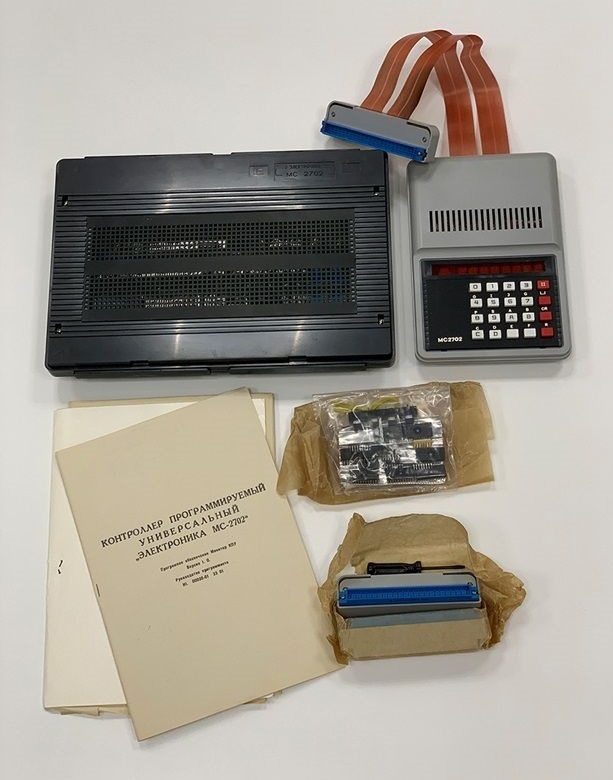
У МС2702 было 3 разъема, но большие. У МС2721 – 5, из которых 4 – меньшего размера, а пятый – такой, кажется, как у МС2702.
В коробочке в фольге микросхема ППЗУ для прошивки пользовательских программ. ЗИП в конденсаторную бумагу завернут, кроме картонной упаковки. Маленькая отвертка присутствует. В общем – кайф или мечта автоматизатора советских времен. Итак, переходим к основной части.
Состав АРМ:
Контроллер МС2702 (2721)
Блок питания контроллера ГН 09-01
Вольтметр В7-28 (В7-34)
Блок сопряжения
Жгуты
Один тип контроллеров для потенциометрических датчиков, другой – для индуктивных. За давностью лет и начинающимся склерозом, не помню, какой для каких датчиков применялся. Зато помню, какой вольтметр для чего служил. Поскольку В7-28 мог измерять напряжение в долях от опорного, но не мог работать с переменным напряжением, он обсчитывал потенциометрические датчики.
Вольтметры В7-28 и В7-34
А вольтметр В7-34 работал с индуктивными датчиками. Они питались от напряжений с частотой 400 Гц или 2000 Гц, и спокойно обсчитывались умеющим измерять переменку В7-34. Для потенциометрических датчиков опорное напряжение бралось со штатного блока питания ГН 09-01. Индуктивные же запитывались со специализированного блока переменного тока заводской разработки.
Блок сопряжения состоял из отдельного корпуса и платы коммутации и платы связи с вольтметром. Плата коммутации осуществляла перебор датчиков на коллекторе. Плата вольтметра программировала вольтметры и посылала команду «Пуск» при считывании данных с каждого проверяемого датчика. Корпус служил для подсоединения плат и соединения разъемов внешних жгутов.
Жаль, что у меня нет фото АРМа целиком, фото блока сопряжения и схем АРМа. Могу только по памяти изобразить функциональную или структурную схему АРМа и блока сопряжения.
Все пропало в период перестройки и дикого капитализма. И так промышленный уклад у нас в стране был не очень крепкий. А в период позднего Горбачева и Ельцина стал вообще ни в дугу.
Документацию выкидывали, оборудование расхищали, считали, что тем, кто не производит материальные ценности платить надо минималку или вообще выгонять с работы.
Хорошо сейчас процесс потихоньку налаживается.
Еще раз благодарим Михаила Непомнина за рассказ, а также дополним его историей развития Московского завода тепловой автоматики (МЗТА), а точнее кратким перечнем приборов автоматизации, также предшественников современных ПЛК, которые были созданы до событий, о которых идет речь в статье, то есть до 1988 года.
1955-60 гг. – первый электронный прибор – ЭР-111-К – «КОМЕГА», дифференциальные манометры и электронные приборы регулирования – РБ-100
1960-е – комплекс – КРИСТАЛЛ, регулирующий прибор импульсного действия с бесконтактным выходом – РПИБ, дифференциатор ламповый – ДЛ-Т, электронные сигнализаторы и ограничители температуры ЭСП-К, ЭОС-Т
2 года назад заказчик дал задание на автоматизацию постов налива бензина. На каждый пост своё управление. Затем все собираем в кучу в SCADA систему. К сожалению проект пришлось заморозить, так как требовалось кучу разрешительной документации. Сама программа работала «на столе». На реальном объекте испытать не удалось. Пишу статью, может для кого-то пригодятся «Фичи» в CoDeSyS 3.5.
Приветствую всех читателей сайта, с вами на связи автор — Семен. И я продолжаю писать статьи по пром. автоматизации.
Что за пост налива?
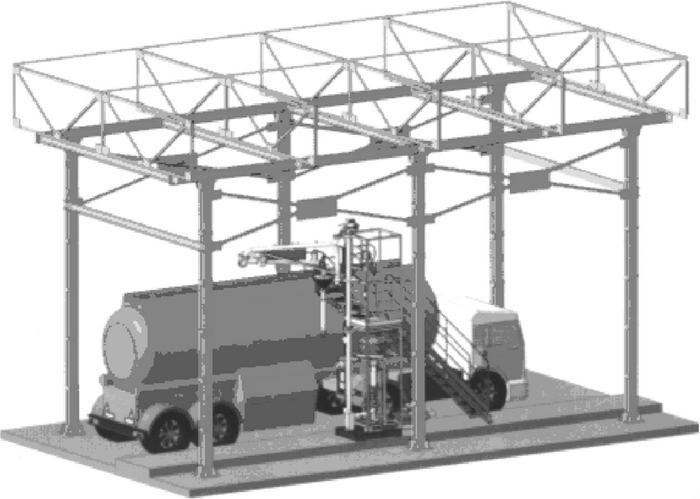
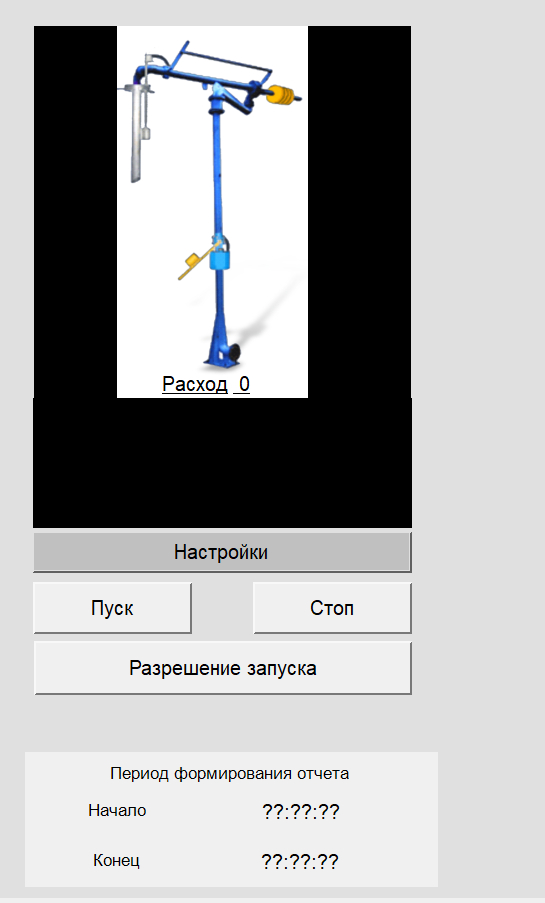
Пост налива — это некая металлоконструкция с лестницей и гибким шлангом, либо сверху, либо снизу. Этот шланг подводят к бензовозу и наполняют его топливом. Выглядит он следующим образом:
Топливо наполняется вот таким вот шлангом:
Что находится примерно в составе оборудования.
Насос
Клапан большого налива
Клапан малого налива
Массовый расходомер
Различные сигнализации
Какие задачи были поставлены в реализации программы:
Универсальность — передача данных для верхнего уровня либо по Ethernet, либо по RS-485.
Подключение различных видов массовых расходомеров — по импульсу или по Modbus.
Фиксация различных аварий и защит и запись в аварийный журнал.
Запуск программы по месту или удаленно.
Различные клапана подачи топлива, либо два клапана либо регулирующий кран.
Управление постом налива реализовывали на базе ПЛК200 с применение CoDeSyS 3.5.
Программа на CoDeSyS 3.5
Ну начнем с того, что я разбивал все процессы и задачи на подпрограммы — чтобы потом легче было находить косяки при отладке.
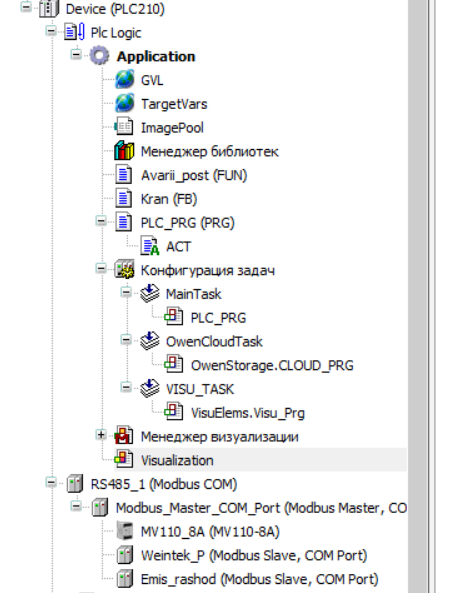
Дерево проектов выглядит примерно так:
В основной программе создан подраздел действие (ACT), сюда я записываю различные преобразования данных, передачу данных и привязку физических входов-выходов.
Тело программы (PLC_PRG) с логикой.
И различные функциональные блоки и функции. Аварии(Avarii_post) и Регулирующий кран(kran)/
Опрос модуля ввода аналогового, панели оператора и массового расходомера по интерфейсу RS-485.
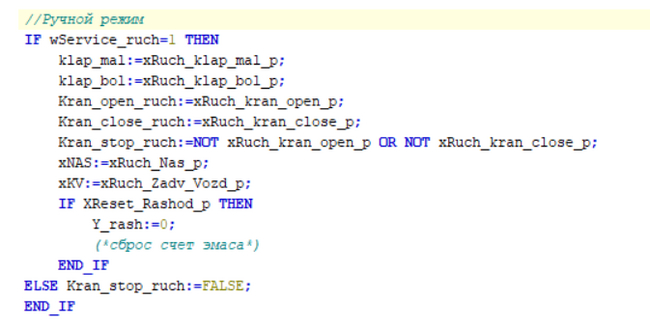
Обязательно ручной режим, включение насосов, задвижек, клапанов, кранов и т.д.
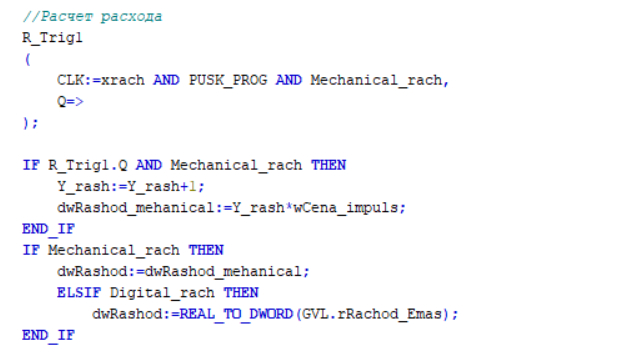
Расчет расхода сделал примерно таким, без учета цены импульса. Знаю, что код кривоват, если есть варианты получше, подскажите, как написать?
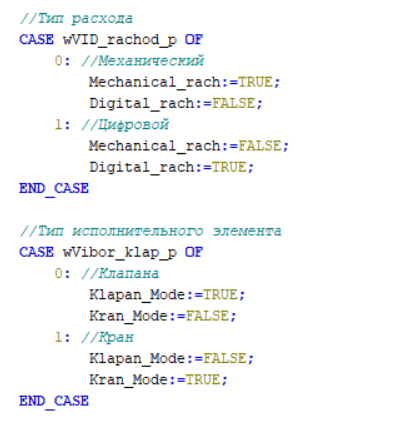
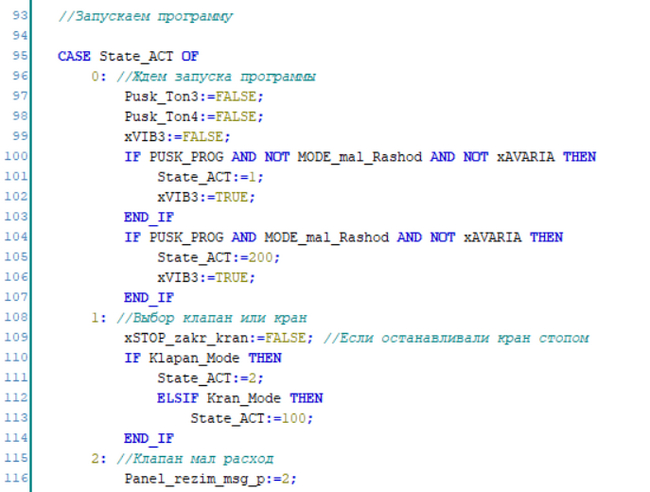
Выбор режима для расхода и задвижки делал через CASE.
Запуск пошаговой программы реализован через CASE. При отладке наглядно показано, где программа остановилась и по какой ПРИЧИНЕ.
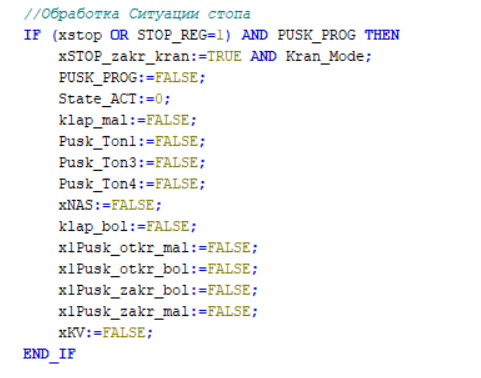
Обработчик стоповой кнопки, все прописано, когда, куда и что должно остановиться.
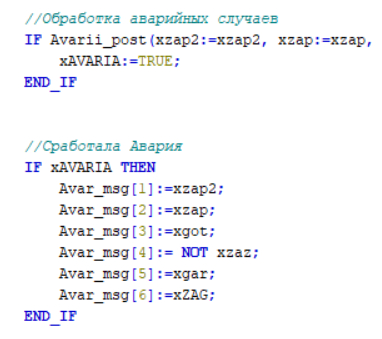
Обработчик аварий и отправка сообщений через массив.
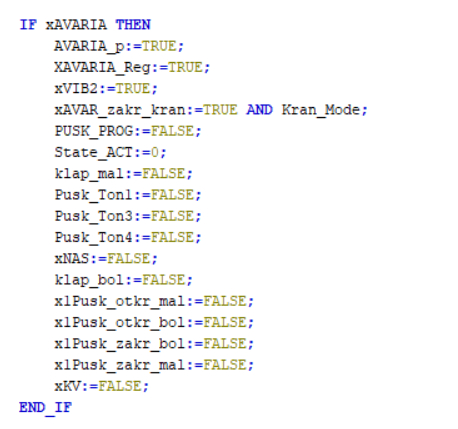
Аварийная ситуация и что должно произойти.
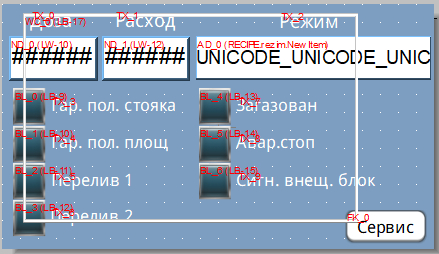
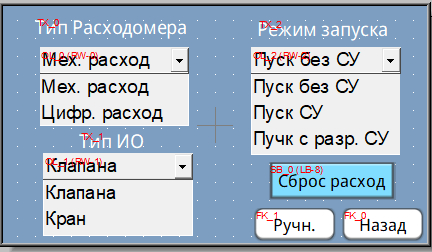
Ставили ещё маленькую панель оператора, вот такая была менюшка:
Ну и что предполагалось быть в мнемосхеме Master SCADA 3.12. Ставили именно её.
Появляются задачи, когда нужно на экране ПР200 или ПР205 или ПР225 задать доли секунды или доли минуты.
На примере покажу, как это сделать.
Программа для вычисления времени и передачи в ФБ
Заходим в программу Owen Logic, возьмем пример ПР200.
После этого добавляем переменную типа Float. Изначально в таймер задаются значения в миллисекундах. Если нам нужны минуты, то нужно преобразовать сначала в секунды, а потом в минуты. Получаем такое интересное число 60 000. Переменную умножаем на это число и подаем в блок таймера.
Таким образом можем ввести минуты с долями. Часто просят сделать секунды с долями. Потому что для работы автомата задержка с целочисленной секундой бывает много. Если нужны секунды с долями, то умножаем просто на 1000.
Требуется запустить центробежный насос, который должен проработав 3 секунды выключиться и, кроме того, необходимо вести учет числа включений. простой запуск механизма осуществляется на Codesys 2.3.
Приветствую всех дорогие читатели, на связи Гридин Семен. Запускаю серию статей совсем простых программ, как раз для начинающих.
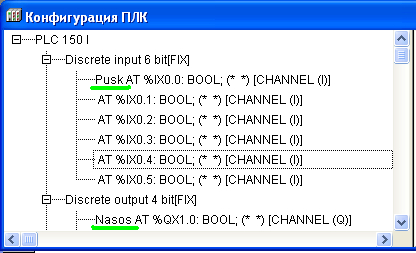
Конфиг входов и выходов и программа
Перед программированием работы насоса нужно сконфигурировать входы/выходы ПЛК, для этого одному из дискретных входов присваиваем значение «Pusk», а одному из дискретных выходов значение «Nasos».
Для управления работой насоса и учета числа включений потребуются: элемент счетчик CTU, элемент таймер TP и переменная «Counter».
Кнопка «Пуск» устанавливает значение «1» на переменной «Pusk», которая включает одновременно счетчик CTU1 и таймер TP1. Число включений суммируется и выводится в переменную «Counter» с выхода CV счетчика. А с выхода таймера TP1 устанавливается булевская переменная «Nasos», которая управляет дискретным выходом ПЛК в зависимости от времени установленного на входе PT таймера, в данном случае это 3 секунды.
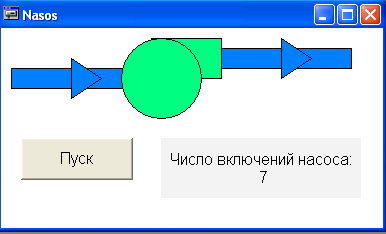
Визуализация установки
Для создания визуализации пуска насоса нужно создать новый объект визуализации на закладке «Визуализации» организатора объектов, разместить на форме элемент «Кнопка», пару прямоугольников для изображения трубопровода, еще 1 эллипс и прямоугольник для насоса, отдельно прямоугольник для создания надписи с количеством включений насоса.
Кнопку «Пуск» нужно в разделе «Конфигурирование элемента – Категория – Ввод – Переменная-кнопка» связать с переменной «Pusk», которая в свою очередь связана с дискретным входом ПЛК. Изображение насоса сконфигурировано в разделе «Конфигурирование элемента – Переменные – Изм. Цвета», нужно вписать переменную «Nasos», а также установить обычный (серый) и тревожный (зеленый) цвета. Прямоугольник для вывода числа включений насоса на панели конфигурирования элемента связан с переменной «PLC_PRG.Counter» в разделе «Конфигурирование элемента – Переменные – Выв_текста».
Чем удобно программируемое реле ОВЕН? Тем, что оно способно выполнять задачи таймера реального времени(ClockWeek). Можно написать абсолютно гибкую программу с кучей параметров по дате и времени. Эти параметры могут выполнять другие не основные функции.
Для этих задач есть несколько вариантов функциональных блоков, у всех разные настройки и степень «Умности». Давайте рассмотрим их в нашей статье.
Приветствую всех, с вами автор блога, пишу статью по реализации вышеназванного функционала.
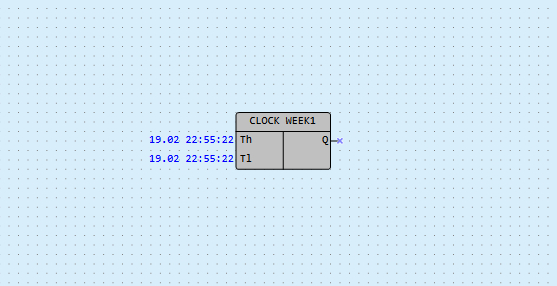
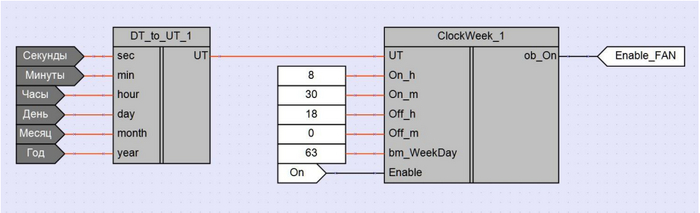
Самый простой таймер ClockWeek
Рассмотрим самый простой недельный таймер.
Все относительно просто, задаем дату и время включения и выключения.
Но, это удобно, когда заранее известны параметры программы.
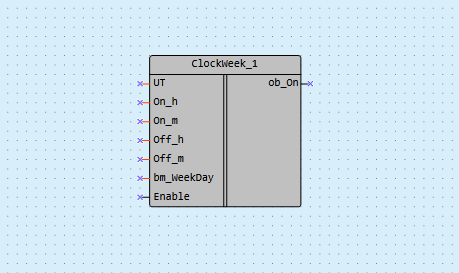
Clock Week редактируемый
Таймер, который позволяет вносить изменения в настройки.
Текущий день недели совпадает с выбранным (bm_WeekDay)
Время включения (On_h и On_m) меньше времени выключения (Off_h и Off_m). Текущее время больше времени включения И меньше времени выключения
Время включения (On_h и On_m) больше времени выключения (Off_h и Off_m).
Текущее время больше времени включения ИЛИ меньше времени выключения Если следующий день недели не используется, то таймер выключится
Вот таким образом выглядит подключение макроса.
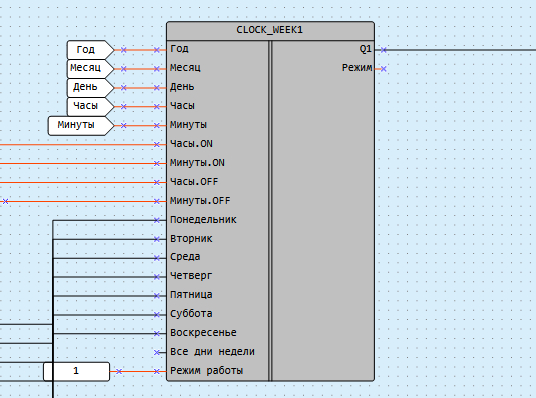
Недельный таймер с двумя режимами работы
Недельный Таймер, который я чаще всего использую.. Он удобный, гибкий. У него есть несколько режимов работы.
Выглядит таймер, вот таким образом.
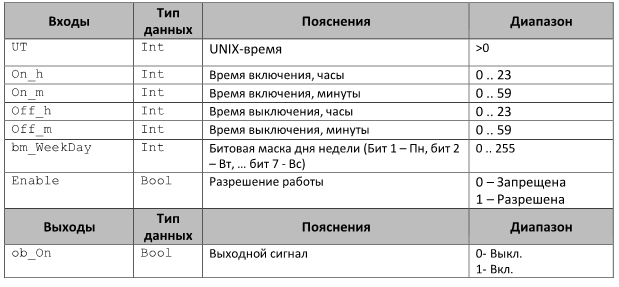
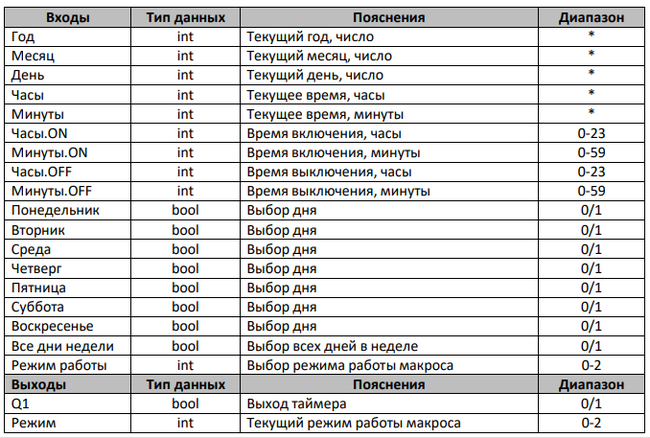
Входы и выходы макроса.
Недельный таймер предназначен для организации выдачи управляющих воздействий на объект в зависимости от дня недели и текущего времени. Таймер автоматически определяет текущий день недели по входам «Год», «Месяц», «День» на которые необходимо подать сервисные переменные часов реального времени.
Текущее время на таймер заводится через входы «Часы» и «Минуты». Таймер может находиться в одном из трех состояний, которые определяется по входу «Режим работы».
«Режим работы»=0 — таймер выведен из работы
«Режим работы»=1 — в этом режиме выход таймера Q1 будет установлен в «1» если совпадут следующие условия:
на вход «Все дни недели» будет подана лог.1 или как минимум на один из входов дня недели
текущее время станет равно или больше заданного времени включения, выбранногочерез входа «Часы.ON» и «Минуты.ON»
совпадет текущий день недели с выбранным через входы дней недели, или если будет установлен вход «Все дни недели» совпадет заданное время включения с текущим временем
«Режим работы»=2 — Данный режим работает аналогично режиму 1, но только один раз. После того как выход Q1 таймера отключится, выход «Режим работы» установится в значение «0» — запрет работы таймера, таймер не будет работать до следующего изменения режима работы через вход «Режим работы». Не зависимо от того сколько дней недели будет выбрано, срабатывание произойдет только один раз в ближайший выбранный день.
В принципе этот таймер забит по максимуму на любые варианты и для любых решений задач. Мне хватает функционала.
На днях как-то приiлось ставить прибор ТРМ12. и я задумался, как реализовать ПИД в Owen Logic. В Codesys 2.3 и 3.5 у меня есть понимание и рабочие алгоритмы, которые стоят на объектах. Для Программируемых реле у меня не было решений.
Приветствую всех, уважаемые читатели. Напишу краткий пост об этом решений.
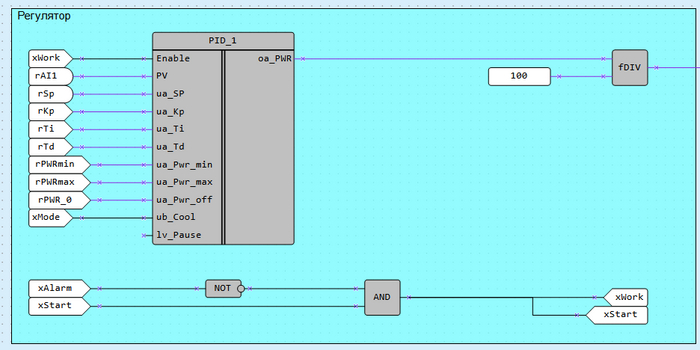
ПИД с аналоговым выходом
На сайте ОВЕН выложили примеры для ПР205 о макросе с ПИД-регулятором. Но там с аналоговым выходом от 0-100 %.
Его можно немного доработать и мы получаем ПИД для задвижки с дискретными выходами.
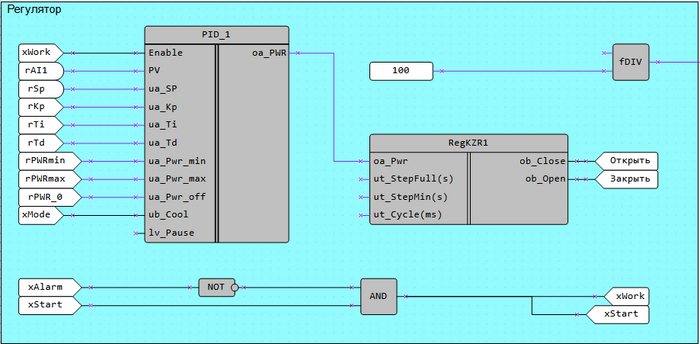
ПИД для задвижки
Вставляем макрос в менеджере компонентов в разделе управляющие и регулирующие модули RegKZR.
Его входные и выходные параметры:
Правильно указываем полный ход задвижки. Иначе будет недорегулирование или перерегулирование. Можно потерять точность.