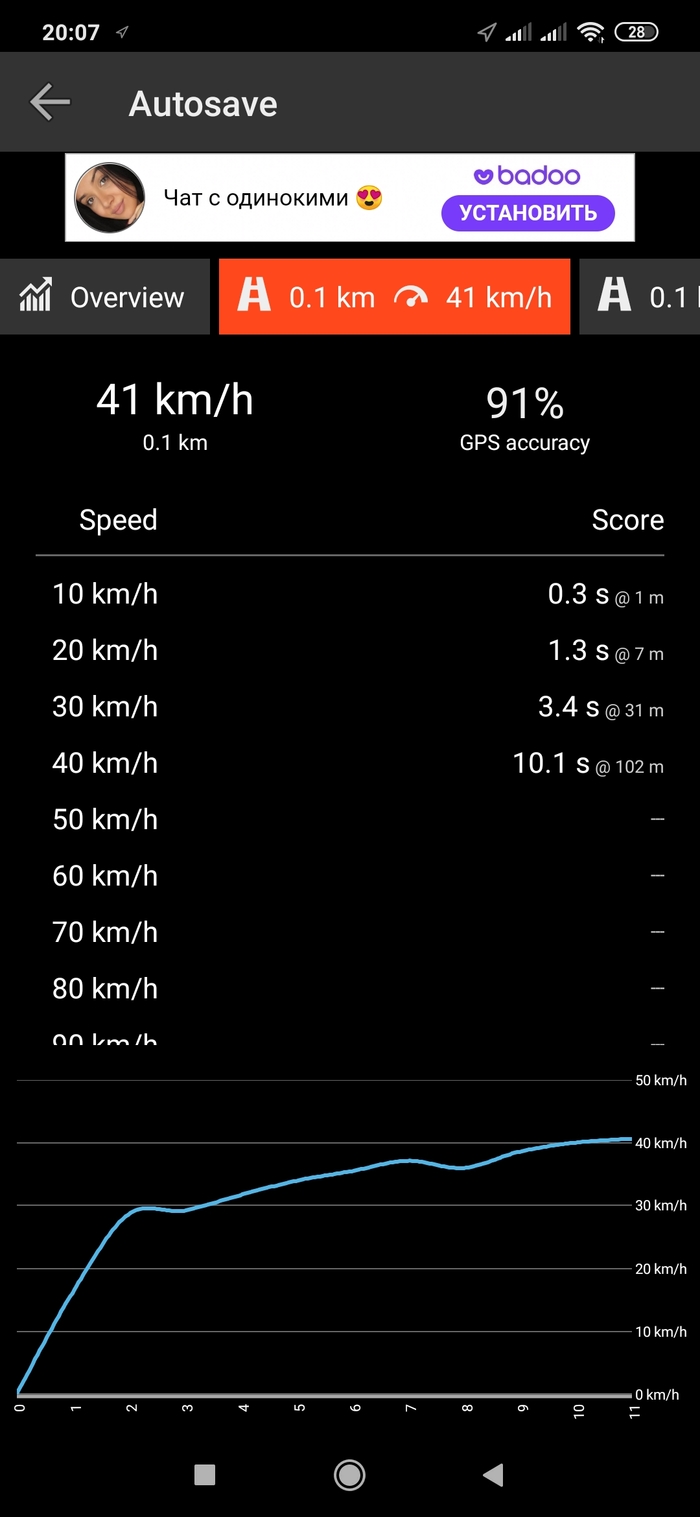
Как видно из видео, при повышении напряжения так же растет и ток (обычно при повышении напряжения ток в проводнике снижается, если мощность не изменяется, но в случае с электродвигателем это не так, работает, с повышением напряжения не только растет мощность двигателя, но и ток. А ток - это то, из за чего двигатели выходят из строя. В электродвигателях так происходит из за "паразитной" электродвижущей силы, которая возникает во время движения проводника в магнитном поле, и чем больше скорость вращения, тем больше эта паразитная ЭДС (вообще по правильному она вроде как называется "наведенная ЭДС", но мне "паразитная" нравится больше, так как она нам мешает, матчасть, формулы справедливы для номинального режима работы), из за которой и растет потребляемый ток, который нужен что бы противодействовать ЭДС. КПД такого двигателя с повышением напряжения тоже падает. Отсюда, если хотим ехать далеко - нужно использовать номинальное напряжение, а не повышенное (и не пониженное, иначе для той же мощности нужно будет больше сила тока, а ток нагревает провода, и уходит в тепло, тем самым снижая КПД). Если хотим ехать быстро, нужно использовать двигатель с соответствующими номинальными (базовыми) значениями, а не увеличивать напряжение.
Итак, просто для примера. Допустим у нас двигатель на 1кВт, 100В и работает при 10А (100х10=1000), если мы будем повышать ему ток до 200В (допустим), то вращаться он будет уже быстрее, но вот максимальный ток, который на него можно подать в этом случае, ток должен быть не 5А (200х5=1000), а меньше, иначе двигатель выйдет из строя (ну при условии, что у него нет запаса и он уже работает на предела). При этом при токе в 5А на 200В момент будет меньше, чем 50% от момента на токе 10А 100В, потому как возрастет паразитная ЭДС.
Формула тока для двигателя выглядит так: I=(U-E)/R. Где I - сила тока, U - напряжение, а R - сопротивление (которое у нас не изменяется). А E- как раз наша паразитная ЭДС (электрический ток, текущий в другом направлении, отрицательное напряжение, для простоты понимая). которая возникает от вращения двигателя. Она возникает всегда, при любом вращении двигателя, даже с выключенным контроллером. Отсюда я и писал в прошлом посте, что на моторколесе "педалировать" такая себе идея. И когда сядет батарейка, никуда вы на своем велике с моторколесом не доедете, как это принято предполагать, типо, купил вел с педалями и моторколесом, что б если сядет батарейка, покрутить педали. Фигушки =) Сопротивление будет даже с выключенным мотором и контроллером и отключенной рекуперацией. Плюс с ростом напряжения и ростом тока растет нагрев. Отсюда сжечь двигатель становится проще, при том что тянет он хуже (потому что ток, который выполняет полезную работу, меньше, из за того что часть тока тратиться на противодействие возросшей паразитной ЭДС). А еще я не повторяюсь, не повторяюсь, но тема не простая, и может если написать одно и то же разными словами, то большее количество людей сможет разобраться...
Ну, с напряжением разобрались. Нужно ездить в номинале, не повышать и не понижать, что бы получить максимальное КПД, и, соответственно, максимальный пробег. Если хочется ездить быстрее - просто стоит взять мотор, который это позволяет сделать. Они все имеют характеристику "максимальная частота вращения", или KV из которой можно эту частоту высчитать (умножаем KV на напряжение, которое будет использоваться для двигателя и получаем скорость вращения). Стоит понимать, что чем выше KV, чем выше максимальная скорость вращения на одинаковом напряжении, но при этом меньше крутящий момент на одинаковом токе и напряжении. Поэтому по скорости вращения не стоит брать двигатели с запасом по KV, так как в этом случае будем жертвовать крутящим моментом.
Теперь поговорим о главном, о токе. На первый взгляд может показаться, что с током все просто. Дали больше ток, получили больше крутящий момент. Но не все так.
Во первых, стоит сказать, что именно ток разогревает провода и сжигает обмотки. Поэтому, что бы уменьшить ток, сохранив ту же мощность, поднимают напряжение. 3кВт мотор с током в 36 вольт для достижения своей номинальной мощности требует 3000/36=83 ампера. 83 ампера - это уже можно гвозди плавить (утрированно). Плюс не каждая батарейка способна отдавать высокий ток. Номинальный ток для батарейки 18650 в среднем 2-3C (2-3 емкости), то есть батарейка 3000мАч может дать нам до 10А. Но лучше брать не более 6А, так как разряд большими токами сильно снижает срок службы батарейки. Плюс большой ток греет провода (нужно провода большего сечения) , а это потеря КПД или прибавка к весу и стоимости. Поэтому стараются повышать напряжение на столько, на сколько это возможно и безопасно в текущем виде транспорта (36 вольт человека не убьет, а вот 80 уже может убить некоторых).
Принято считать, что мотор может кратковременно отдавать мощность выше номинала (пока не поплавятся обмотки, так как по сути все, что ограничивает ток в них, это их охлаждение, рано или поздно обмотки нагреются и проводки в них перегорят, если давать ток, который нагревает их сильнее, чем охлаждает организованный отвод тепла. При этом тут нет системы защиты от перегрева, типо как в процессорах (вообще ставят датчики температуры, но не все и не всегда, плюс контроллер должен мочь их читать, плюс в том, что обмотка на статоре, и напихать туда термодатчиков не проблема, так как они не вращаются). Но это все на бумаге. По сути что такое мощность, это ток умноженный на напряжение. Иными словами, допустим у нас мотор на 100 вольт 1000ватт, с номинальным крутящим моментом 50 н*м. Это значит что на 10А он выдаст свою мощность в 1000ватт и разовьет номинальный момент. Давайте кратковременно повысим ток до 20А, получится, что мотор сейчас дает 2000Вт мощности. И, судя по расчетам, его момент будет равняться 100Н*М в этот момент, да? (мы повышали только ток, не трогая напряжение, пренебрегаем потерями на проводах, которые возросли и напряжение просело). Это в теории так. А на практике есть электромагнитное поле, генерируемое на статоре, и есть постоянные магниты, которые на роторе. Мы батарейку высаживаем, обмотки греем, магнитное поле усиливаем на статоре, но ротору на это все положить, у него какие были магниты, такие и остались, и того, реальный крутящий момент при увеличении тока в два раза будет не х2, а х1.7 или х1.5, чем больше мы выходим за номинал, тем меньше множитель, и соответственно, меньше КПД. Ведь крутит наше колесо и катит наш транспорт вперед не мощность, а крутящий момент. Все эти "технические характеристики", что можно увидеть в описании моторов, как правило теоретические. Особенно там, где указывают максимальный крутящий момент. Номинальный да, скорей всего он такой и есть, как его указали, но максимальный - нет. А что бы его измерить двигатель нужно сжечь. Таким образом, берем двигатель поменьше с низким номиналом, подаем больше тока, что бы быстрее ехать, получаем хуже КПД и меньше пробег на одном заряде, при том что ехать сильно лучше не стали, да еще и можем сжечь мотор. Но конечно иногда нужно дополнительный момент, даже если это сильно высаживает батарею и снижает КПД, и в таком случае использовать пиковую мощность стоит. Но стоит понимать, что мощность "в два раза" не даст вам преимущество "в два раза", а мощность "в три раза", даст момент в лучшем случае "в два раза".
Ну так что выходит, нужно взять мотор помощнее просто? А... берем мотор помощнее (в номинале), с более крупными и мощными магнитами и... У каждого мотора есть такая характеристика, как "ток холостого хода", это сколько нужно подавать ампер, что бы двигатель крутил сам себя без нагрузки. По логике, учитывая, что конструкция инертная, сопротивление воздуха почти отсутствует, подшипники хорошие, она должна свободно крутиться очень долго даже если ее просто рукой крутнуть, и для поддержания вращения нужно всего то десятые доли ампер, что бы просто преодолеть незначительное сопротивление качения подшипников и сопротивление воздуха. Так откуда же ток холостого хода на двигателе в 5кВТ может быть в районе 5А? Ведь 5А, это, на секундочку, ток полной нагрузки для двигателя на 500Вт 100Вольт. А все просто, помните я писал о "паразитной ЭДС". Так вот, эти 5А нужны для того, что бы "продавить" эту самую паразитную ЭДС. По сути ток, который выполняет работу по вращению, там мизерный на холостом ходу, а весь "ток холостого хода" просто сражается с обратной ЭДС, которая возникает при вращении двигателя. Чем мощнее у нас мотор в номинале, чем мощнее магниты и обмотки. тем выше эта "паразитная ЭДС", и тем больше нужно тока, что бы ее победить. Но правда есть и радость в этом всем. Паразитная ЭДС величина постоянная, и зависит от скорости вращения, а не от тока, протекающего по обмоткам, поэтому каждый дополнительный Ампер сверх холостого хода уже будет уходить в полезную мощность (ну почти каждый, так как там еще потери на нагрев при увеличении тока и т.д.). И, зная вот это, еще раз хочется сказать о людях, которые собираются крутить педали на своем 5кВт велосипеде с моторколесом, когда у них сядет батарейка, и доезжать до дома =) Они конечно могут крутить педали сколько угодно, но на сколько их интересно хватит в сражении с этой "паразитной ЭДС" (которая есть всегда), и как быстро они ей проиграют это неравный бой? Поэтому писал в прошлом посте, напишу и в этом, моторколесо на велосипеде делает из него скутер, а не велосипед. Батарейка села - приехали. Да, пару километров можно медленно "докрутить" до дома, но не более. При этом с ростом скорости растет и паразитная ЭДС.
Резюмируя все вышесказанное. Не нужно брать большой мотор (большой мощности) если хочется ехать далеко. Потому что "ток свободного хода" высадит аккумулятор быстро и эффективно. Тут работает принцип "тише едешь - дальше будешь", собственно потому электромашины так мало и проезжают на скоростях выше рекомендованных, и главная причина уменьшения пробега не сопротивление воздуха и асфальта (хотя и это конечно тоже), а именно "сражения с паразитной ЭДС" при возросших оборотах.
Идеальная номинальная суммарная мощность для велосипеда для езды по городу в районе 1500 Ватт. Если ездок тяжелый, то 2000 Ватт. Больше - это уже эндуро пушка для прострелов по лесу. И ставить такой мотор стоит в раму, а не на колесо (вообще любой мотор стоит ставить в раму). Для моноколеса все немного по другому, там от мощности зависит и эффективность торможения, плюс безопасность (продавливание), поэтому нужно подбирать немного "с запасом", но опять же не "перезапастись", так как больше расход заряда "на ровном месте" и больше вес всей конструкции. Колесо весом 30 кг это чушь как по мне. Колесо должно быть строго не больше 22.5Кг (имхо), что бы вместе с сумкой можно было кинуть в багаж самолета или междугороднего автобуса, который взвешивает багаж. Плюс мощное колесо (сильно мощное) может убить батарею моноколеса или велосипеда. Но об этом я расскажу, чуть позже.
Ну, собственно, как ездить далеко и правильно, понятно.
Теперь поговорим о том, как не сжечь свой моторчик. Итак, мы взяли велосипед с моторколесом. Допустим 1500 ватт. Штурмуем на нем крутой подъем. Велосипед тянет, тянет, но скорость все падает и падает. И в определенный момент мы встали на подъеме. Мотор вибрирует, контроллер пищит, вперед не едет. И тут... тишина, мы начали движение задним ходом с горы прямо в ад. Мы сожгли мотор или у нас просто отрубился контроллер. Тут обычно в зависимости от того, что мощнее. А мощнее обычно контроллер, так как он должен иметь возможность кратковременно давать мотору пиковые токи, плюс если он будет работать на пике своих возможностей, его КПД будет ниже, чем на 50-60% от пика (ну так транзисторы работают), поэтому контроллер либо вырубился, спасая мотор, либо мы сожгли мотор. Скорей всего второе (особенно если на моторе нет термодатчиков). Почему так произошло?
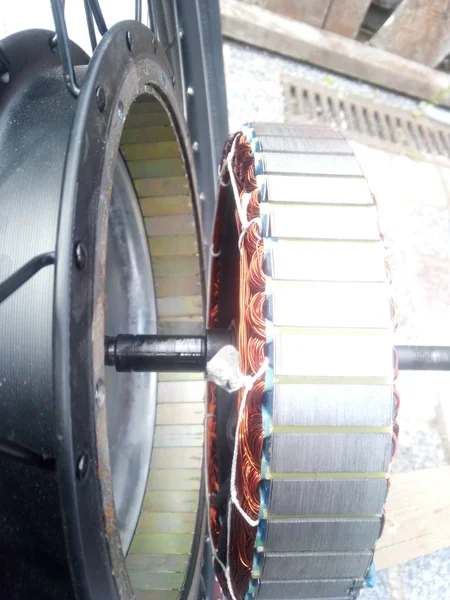
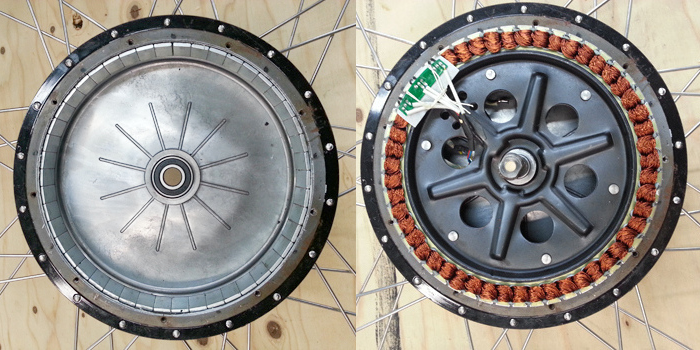
Обмотки двигателя работают не одновременно, а включаются поочередно. Сразу одна, потом вторая. Смотрите ссылку в начале поста на википедию. Когда обмотки работают коротковременно, быстро переключаясь при вращении, тогда они не успевают нагреваться, и по сути протекание через них тока похоже больше на протекание переменного тока через проводник (особенно за счет паразитной ЭДС, которая течет в обратном направлении в момент, когда обмотка не задействована). И, как итог, обмотки сменяют друг друга, успевают охладиться, да и просто не так сильно нагружены. Но когда мы уперлись в камень на подъеме, колесо стало под нагрузкой, то вся нагрузка ложиться на один ряд обмоток, пауз нет, перегрев, и рано или поздно обмотка не выдерживает, перегорает, двигатель мертв (ну при условии, что двигатель не овермощный).
Что бы такого избежать, двигатель должен постоянно вращаться, что бы обмотки чередовались. Для этого чаще всего лучшим решением будет взять мотор с большими оборотами и меньшим моментом (про KV я уже писал, берем с большим KV), и поставить редуктор. Так даже на минимальной скорости двигатель будет вращаться. А за счет редуктора момент будет тот же. Редуктор может быть в самом корпусе двигателя (планетарки для мторколеса), либо это обычный цепной или ременной редуктор, при установке двигателя в раму. Плюс на очень малых оборотах двигатель отчетливо "пинается" за счет работы магнитов, с редуктором этот эффект сильно сглажен, так как то, что для колеса - малые обороты. Для двигателя нормальные. Плюс КПД выше всего в номинальном режиме работы, поэтому стоит крутить двигатель до номинальных оборотов. На малых оборотах много уходит на нагрев обмотки, на больших - на паразитную ЭДС. Правда для моноколес только прямой привод доступен. Поэтому там нужно искать оптимальную мощность.
Ну, как не сжечь двигатель, понятно. Но что еще дает нам мотор, помимо "троллейбусной тяги", отсутствии коробки передач, ровного момента (на самом деле нет, с ростом оборотов момент падает, но не сильно, главное не выходить за номинал). Какие неочевидные преимущества можно еще получить от электропривода.
В первую очередь - это то, что двигатель потребляет ровно столько, сколько ему нужно. В ДВС он сожжет все, что мы в него впрыснем (в камеру сгорания), и мощность регулируется исключительно подачей топлива. Нажали больше на педаль, больше смеси попало в камеру сгорания, больше мощности получили. В электромоторе не так. Если нет никакой нагрузки, он будет вращаться с током холостого хода. Добавим немного, и вот он начнет потреблять ровно столько, сколько нужно что бы преодолеть сопротивление нагрузки и еще чуть чуть, что бы выйти на номинальные обороты (собственно поэтому можно "буксовать" на велосипеде, но в момент пробуксовки потребляемый ток низкий, двигатель не потребляет весь свой номинал как правило, особенно если там какие то 5кВт, в момент пробуксовки потребление может быть 300 ватт, например, зависит от поверхности, и, соответственно, от нагрузки), отсюда высокая эффективность двигателя. Плюс, для того же дрифта, момент "срыва" колеса будет всегда "чуть чуть больше, чем нужно для зацепа", а для ДВС момент всегда одинаковым, и зависящим от оборотов и передачи, а не от поверхности, по которой едет машина. Отсюда могут быть проблемы со сменой поверхности, типо ехали по асфальту, выехали на грунт, развернуло. В электромоторе "дрифтить будет ровно" по любой поверхности. Причем еще и энергоэффективно =)
Есть конечно частный случай, когда по обмотке пропускается ток определенной силы, заранее заданной. Это нужно для работы шаговых двигателей или двигателей ЧПУ станков. При отсутствии чередования обмоток в таком случае будет так называемый "режим удержания", когда двигатель фиксируется в определенном положении и не вращается, удерживая это положение. Но в этом случае обмотка получается в режиме короткого замыкания, и что бы она не перегорела используются специальные драйвера с ограничением не только по напряжению, но и по току (сила тока настраивается). В этом же режиме двигатель может и вращаться, когда ток не от нагрузки зависит, а всегда постоянный. В таком случае двигатель будет обладать постоянным крутящим моментом (почти постоянным, так как он зависит от оборотов еще). Но в текущем контексте этот режим работы нас не интересует, так как для двигателей электротранспорта этот режим не имеет смысла.
Плюс у электромотора есть возможность резистивного торможения. Это когда двигатель работает в режиме генератора, и на нем висит электронагрузка (сопротивление, резистор). Рекуперация (зарядка батареи в момент торможения или движения с горы) - это частный случай резистивного торможения, когда в качестве нагрузки у нас выступает батарея.
Плюсы такого торможения в том, что у нас всегда идеально работая АБС система. Потому как как только получается микропроскальзывание колеса, напряжение в обмотке сразу же падает (потому что замедляется вращение) "упираться" мотор перестает, и сцепление с поверхностью восстанавливается, так как колесо выходит из блокировки. Поэтому торможение будет всегда "на грани", по любой поверхности. Типо "еще чуть чуть и сорвали колесо", причем это "чуть чуть" бесконечно приближено к точке срыва (на максимальной мощности торможения, когда нагрузка, которую повесили на мотор, больше, чем нужно для торможения, когда нагрузка меньше, то торможение будет просто равноценно нагрузке). И все это происходит автоматически. И эффективность торможения будет зависеть не от тормозов и работы АБС системы, а исключительно от дороги, подвески, покрышки и т.д.
Но есть нюансы. Мотор не может развить большее тормозное усилие, чем его момент. И тут нет "пикового момента" (в отличии от разгона, когда мы можем превысить номинальный ток). Чем больше обороты, тем больше момент. С падением оборотов момент снижается, из за чего торможение очень эффективно на большой скорости, но не эффективно на малой (вернее эффективность его такая же, но в процентном соотношении от скорости). Чем больше мы вешаем нагрузку, тем сильнее будет торможение, но, как я сказал, до определенного уровня момента. Дальше увеличение нагрузки не будет никак сказываться на тормозящем эффекте. Поэтому если мотор маломощный, то и торможение будет слабым. При торможении мотором нет износа колодок и другой тормозной системы (кроме батареи). Нельзя тормозить при полном заряде батареи или нужно вешать отдельную нагрузку, которая будет на себя брать ток, а не пускать его в батарею (отключить рекуперацию, навесить резистор, ток пустить в резистор, ну это так, условно, на самом деле там нужно вешать транзисторную электронную нагрузку большой мощности, что бы дозировать усилие торможения, и радиатор, что бы энергия от торможения рассеивалась в тепловую на транзисторах). Сильное торможение убивает батарею. Так как для ее долговечной работы ток заряда не должен превышать половины ее емкости. Условно, если у нас S20P6 батарея (конфиг батареи, 20 последовательных 6 параллельных сборок), при емкости ячеек на 3000мАч, то максимальный ток торможения не должен быть выше 9А, все, что выше 9А уже плохо скажется на сроке службы батареи. Но при ее неполном заряде можно допустим тормозить до 18А (1С заряд при заряде от 20 до 80% современные литийионные батареи терпят без сильного удара по ресурсу), но не более. Все, что больше 18А - это значительное сокращение срока службы батареи (в частности потеря емкости). Плюс, как я уже сказал, нельзя тормозить на полностью заряженной батарее. Таким образом, если вы живете на горе, и ездите на моноколесе или на моторколесе куда то с горы, то не стоит заряжаться на максимум и куда то ехать. Это убьет вашу батарею. Для батареи вообще вреден полный заряд и полный разряд. Оптимально держать батарею в режиме 40-80%. Делая полный заряд-разряд раз в пару месяцев (хотя тут еще стоит учитывать, что некоторые БМСки начинают балансировать батареи только в районе 4.1-4.15 вольт, а это более 95% заряда, так что если батарею с такой БМСкой редко заряжать на максимум, то это может негативно сказаться на балансе элементов, особенно если активно работает рекуперация и элементы не отбирались в ручную по емкости и сопротивлению (кто ж их будет отбирать то), но каждый раз заряжать на полную не стоит, лучше раз в несколько зарядок, это немного продлит срок службы батареи). Большой разряд так же плох тем, что чем меньше напряжение, тем больше ток нужен для той же мощности. А это еще быстрее высаживает остатки батареи и убивает ее ресурс. Особенно когда батарея не имеет запаса по мощности (когда мотор мощнее батареи).
Резюмируя. Двигатель нужно подбирать под свои нужны. Номинальные показатели должны быть подобраны под основной режим езды. Если очень хочется, то можно при помощи контроллера временно дать больше тока или напряжения, но постоянно это использовать не стоит. Если есть возможность использовать редуктор - лучше использовать редуктор. Так как прямой привод не любит малые обороты. Принцип "чем больше, тем лучше" тут не работает. Лишняя мощность выльется в жор заряда "на ровном месте", плюс еще и имеет больший вес. Как сам мотор, так и батарея.
Под конец еще так же хочу сказать про двигатели переменного тока. Например, обычные асинхронники не обладают хорошим пусковым моментом, но при этом требуют высоких пусковых токов (сила тока, нужная для запуска, в разы выше, чем сила тока, нужная для работы). Из за чего в электротранспорте применяются крайне редко. Но у них намного меньше паразитная ЭДС в процессе работы (намного меньше, так как нет постоянного магнита, но короткозамкнутый ротор все так же своим магнитным полем влияет на обмотки), и полностью лишены паразитной ЭДС в режиме вращения без подведения питания (свободного вращения). Но из за этого у них отсутствует режим рекуперации и резистивного торможения (тормозить то ими можно, но для этого нужно "вращать" двигатель в другую сторону, тратя энергию).
Из за недостатков, в частности слабый начальный момент и высокие пусковые токи, такие двигатели не получили распространения в транспорте, но очень полезны в промышленности. Так как там стартонуть двигатель без нагрузки не проблема. Есть еще асинхронники с массивным ротором, где нет проблемы с пусковым моментом, но там КПД сильно ниже. И другие типы двигателей переменного тока. Но в персональном транспорте они не применяются. Только крупном промышленном транспорте (троллейбусы, электрички и т.д., но тут я не разбираюсь, какие двигатели там стоят, инфа по асинхронникам тут).
На этом про электродвигатели все.