По-простому о нейроинтерфейсах. 1 часть
Всем привет!
Продолжаем.
Очередные технологии "Юного техника" за 1972 и в этот раз нейроинтерфейсы.
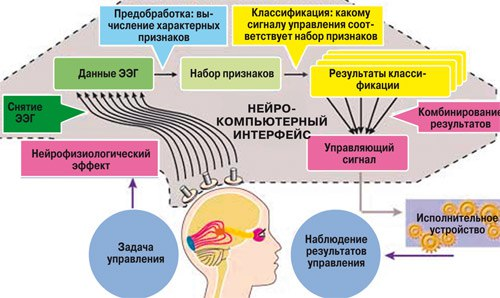
До недавнего времени мечта о возможности контролировать окружающую среду «силой мысли» была в области научной фантастики. Однако продвижение технологий принесло новую реальность: сегодня люди могут использовать электрические сигналы активности мозга, чтобы взаимодействовать с ними, влиять или изменять их среду. Технология интерфейса «мозг—компьютер» или нейрокомпьютерных интерфейсов сможет позволить людям, неспособным говорить и/или использовать свои конечности, снова общаться или управлять вспомогательными устройствами для ходьбы и манипулирования объектами . Пользователь и нейрокомпьютерный интерфейс ( далее НКИ) работают вместе. Пользователь после периода обучения начинает генерировать сигналы мозга, которые кодируют намерение, а НКИ, также после обучения, обнаруживает эти сигналы, декодирует и переводит их в команды на устройство вывода, которое выполняет намерение пользователя.
Если выбирать трех самых влиятельных исследователей в истории разработки нейроинтерфейсов, то это будут Филипп Кеннеди, Уильям Добелл и компания «Кибернетикс».
Невролог Филипп Кеннеди первым внедрил НКИ в мозг обезьяны в 1987 году, а в 1998 году — в мозг человека. После запрета ставить эксперименты над людьми, Кеннеди вживил электроды в собственный мозг, а затем удалил их после нескольких дней успешных тестов. Врач и исследователь Уильям Добелл в 2002 году частично вернул зрение пациенту с помощью нейроимпланта. Система НКИ Добелла включала в себя черно-белую камеру, дальномер и компьютер весом в пять килограмм, соединенный с электродами в коре головного мозга. Этого было достаточно, чтобы пациент проехал за рулем машины по парковке. После гибели Добелла в 2004 году пациент снова потерял зрение.В 2005 году компания «Кибернетикс» добилась впечатляющих результатов по вживлению НКИ в человеческий мозг, который позволил пациенту управлять роботизированной рукой.
НКИ бывают трех видов, каждый из которых определяется способом передачи сигналов.
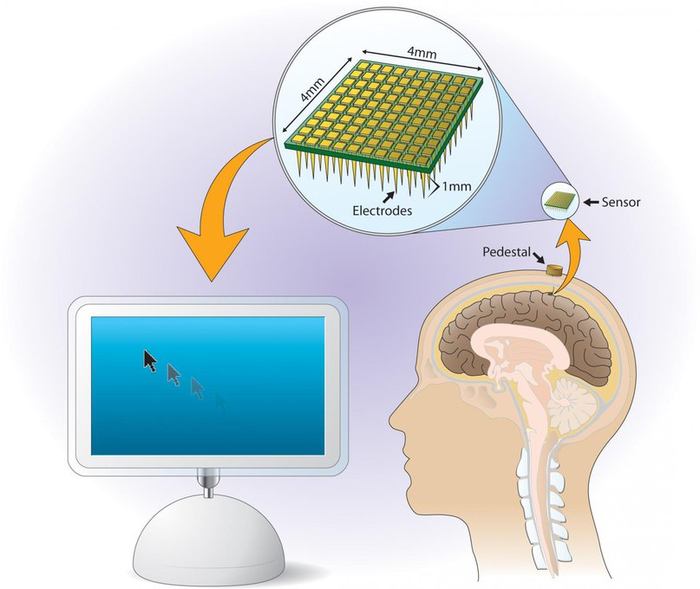
1. Инвазивные интерфейсы предполагают вживление электродов в мозг и обеспечивают прямую нейронную связь. Несмотря на высокую эффективность и чистоту сигнала, у этого вида есть серьезный недостаток — со временем нейроны теряют чувствительность, и для продолжения использования приходится устанавливать их вновь уже в другом месте.
2. В полуинвазивных нейроинтерфейсах электроды прикрепляются к поверхности серого вещества.
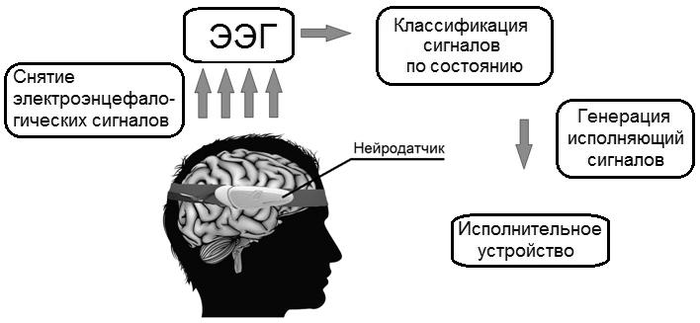
3. В неинвазивных — электроды устанавливаются на голове методом электроэнцефалограммы (ЭЭГ). Благодаря этому нет ограничений, связанных с потерей чувствительности, однако есть другие недостатки: продолжительность установки, смещение по мере использования, необходимость обновлять проводящий гель и невозможность прикрепить электрод к нужной группе нейронов. Из-за этих особенностей системам неинвазивных НКИ нужно обучаться определять сигналы каждого конкретного пользователя.
Для чего используют НКИ?
1.Наука. Открытие сигналов мозга и их связь с деятельностью человека в свое время получило научный вес, сравнимый с исследованиями ДНК и расшифровкой генома человека. До сих пор научное сообщество познает работу мозга через его электропроводность, и каждый год происходят новые открытия.
2. Медицина.. Нейропротезы считаются стандартным методом решения проблемы потери слуха.
Самый популярный и самый первый по времени разработки протез такого типа— кохлеарный имплантат. В 1748 году Бенджамин Уилсон использовал лейденскую банку, чтобы стимулировать слух у глухой женщины. В 1957 году два французских врача имплантировали во внутреннее ухо пациенту устройство, которое непосредственно стимулировало слуховой нерв. Вскоре после этого в 1961 году доктор Уильям Хаус разработал первый кохлеарный имплантат с одноканальными электродами. Затем в конце 1970-х были разработаны имплантаты с многоканальными электродами. Использование многоканального электрода позволило создать более сложный и реалистичный сигнал, за счет стимуляции улитки. Имплантат состоит из внешней части, которая находится за ухом, и внутренней, которую хирургически помещают под кожу. Имплантат состоит из следующих устройств:
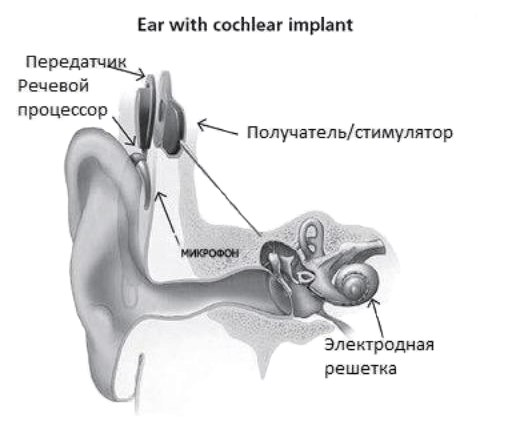
Микрофон и речевой процессор (внешнее устройство) принимают звуковые сигналы от внешнего мира и передают информацию в приемник/стимулятор (внутреннее устройство), который соединен с электродной решеткой. Имплантат не восстанавливает нормальный слух, зато помогает понять речь окружающих. Кохлеарный аппарат сильно отличается от слухового аппарата тем, что слуховые аппараты усиливают звуки, чтобы их можно было обнаружить поврежденными ушами. Кохлеарные имплантаты обходят поврежденные участки уха и непосредственно стимулируют слуховой нерв. Сигналы, генерируемые имплантатом, отправляются через слуховой нерв в мозг, который распознает их как звук. Слух через кохлеарный имплантат отличается от обычного слуха и требует времени для изучения или переучивания. Благодаря имплантату люди могут понимать речь других людей и звуки окружающей среды. Текущей областью исследования является разработка полностью имплантируемого устройства. Для воплощения этого в реальность нужно, чтобы микрофон был малым и очень чувствительным. Кроме того, аккумуляторная батарея должна иметь достаточно долгий срок службы и самозаряжаться, а вся система должна быть достаточно мала, чтобы полностью имплантироваться.
На подходе управление экзоскелетами и роботизированными протезами рук и ног.
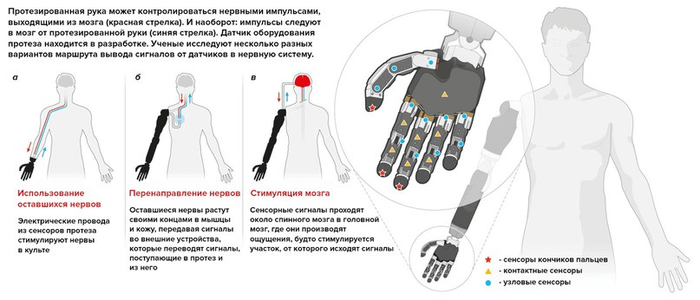
(к пикче - Узловые сенсоры располагаются в местах сгибания механических пальцев. Контактные сенсоры — сенсоры, контактирующие с предметами.)
Через 2 дня вторая часть. А пока подписываемся на сообщество и спасибо за внимание.