

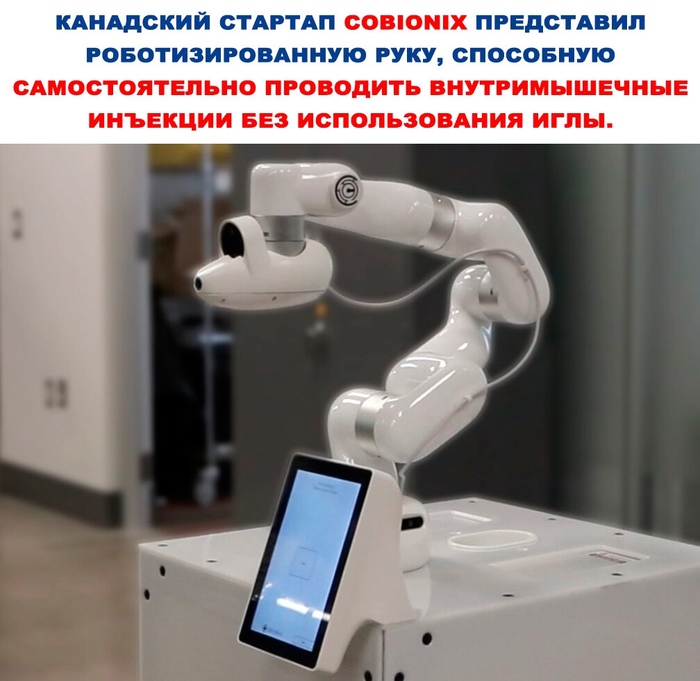
Радикальные меры
Показать полностью
3

Нет нет, я - обычная альпака
Автор: https://mobile.twitter.com/RobotPolicy/status/14549379470363...
Нет, это не Альтрон собирается захватывать мир. Просто севастопольский пенсионер продаёт собранного им робота, рассказывающего анекдоты.
Программу написал 32-летний племянник мужчины, а вот собирал андроида по имени DJ Robo уже 64-летний Виктор. От него робот и получил свой голос, а также встроенный сборник приколов.
DJ Robo создали в коммерческих целях: его голос и жесты можно изменить для своей рекламы. Состоит он из микрокомпьютера и пластика, насаженного на стальной скелет, а работает это чудо техники от сети и продаётся за 260 000 рублей.
Свободный перевод интервью с Пэтом Мэрионом, ведущим разработчиком программного обеспечения для сенсорных систем Атласа.
Разработчики Атласа используют паркур для быстрого создания поведения, динамического движения, и связи между восприятием и системами управления, что позволяет роботу в буквальном смысле адаптироваться на лету.
Алгоритмы восприятия робота преобразуют данные сесноров в формат, пригодный для принятия решений и планирования физических действий. Атлас использует инерционные сенсоры, сенсоры положения моторов, сенсоры силы для управления движением и удержания равновесия тела.
Атлас использует time-of-flight камеру с сенсором расстояния для создания облака точек с частотой 15 кадров в секунду. Облако точек (point cloud) - это большая коллекция измеренных растояний. С помощью алгоритма многоплоскостной сегментации Атлас извлекат из облака точек отдельные поверхности, из которых в свою очередь строятся модели окружающих объектов.
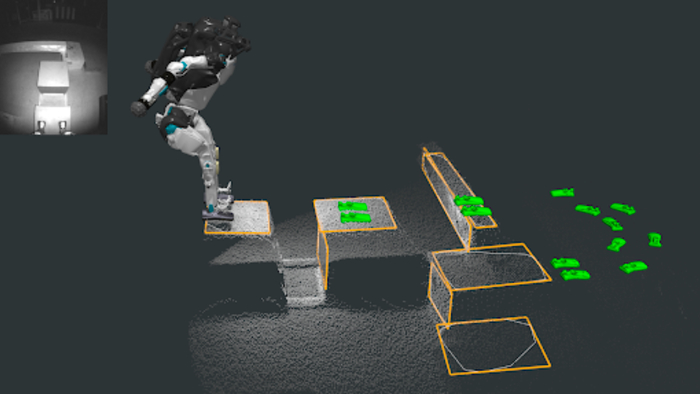
Слева вверху на рисунке показано, что видит инфракрасная камера робота. Оранжевыми прямоугольниками обозначены поверхности, которые Атлас смог распознать. Эти поверхности используются для планирования будущих действий, и зеленым цветом показано, куда робот планирует ставить ступни ног.
Робот получает высокоуровневую карту, показывающую, куда он должен двигаться и какие трюки он должен исполнить по пути. Эта карта является приблизительной, она не соответствует в точности построенной дорожке с препятствиями. Атлас использует эту карту для бега, при этом заполняя пробелы данными сенсоров. например, Атлас знает, что должен запрыгнуть на коробку. Если подвинуть коробку на полметра в сторону, Атлас все равно найдет и запрыгнет на нее. Если отодвинуть коробку слишком далеко, система не сможет ее найти и робот остановится.
Каждое движение, которое производит Атлас, получено из библиотеки шаблонов, подготовленных заранее с помощью оптимизации траекторий. Благодаря этому мы можем обучать робота новым движениям, добавляя новые траектории в библиотеку. Получая от системы восприятия запланированную цель для движения, робот выбирает из библиотеки шаблон, наиболее близкий к требуемому движению.
Разработка элементов поведения позволяет инженерам Boston Dynamics испытать пределы возможностей робота в симуляции, а также уменьшает количество вычислений, которые должен выполнять робот во время движения.
Для непосредственного выполнения движений робот использует так называемое управление с прогнозирующими моделями (model predictive control, MPC), т.е. модель динамики робота используется для предсказания того, как движения робота будут развиваться со временем. Контроллер постоянно решает задачу оптимизации для нахождения оптимального движения.
Шаблоны, сохраненные в библиотеке, являются примерами "хороших" решений. Контроллер адаптирует силы, положения частей тела, время исполнения движений, чтобы учесть факторы окружения: разницу в геометрии, проскальзывания конечностей и другие факторы, возникающие во время движения. Прыжок с платформы высотой 52 см принципиально не отличается от прыжка с платформы высотой 40 см, и MPC контроллер робота успешно решает подобные задачи.
Поскольку контроллер прогнозирует будущее, он может создавать плавные переходы от одного движения к другому. Это также облегчает создание библиотеки движений, поскольку инженерам не приходится рассматривать комбинации различных движений, которые могут следовать друг за другом. Разумеется, MPC контроллер не всесилен, и нам приходится искать компромис между сложностью контроллера и размером библиотеки шаблонов траекторий.
Работа над паркуром позволила получить глубокое понимание того, как можно создавать и управлять широким спектром динамических движений Атласа. Что еще более важно, это позволило создать расширяемую программную систему, которая будет расти и развиваться, давая Атласу новые возможности для восприятия и взаимодействия с его окружением.
В Hyundai начали использовать роботов Boston Dynamics на своём заводе вместо охранников.
Так и без работы остаться недолго😱






