
0 просмотренных постов скрыто



Марсианский вертолет Ingenuity совершит первый полёт в начале апреля
На недавнем брифинге NASA сообщили, что первый полёт Ingenuity намечен на 8 апреля, но эта дата может сместиться на пару дней в обе стороны.
Оказывается, на Ingenuity установлен крошечный кусок ткани, который раньше был частью первого самолёта, который поднялся в воздух.
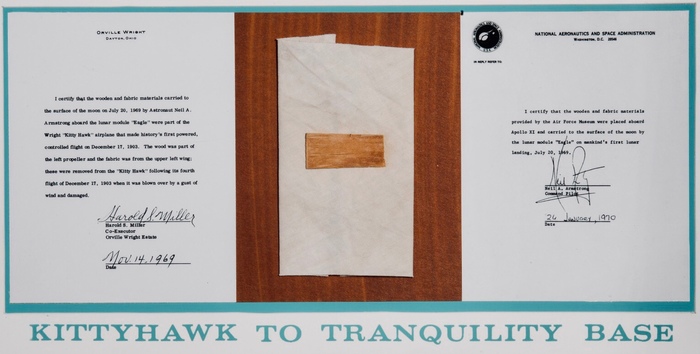


Другая часть этого самолёта уже побывала на Луне в миссии Апполон-11, и может отправиться с первой экспедицией на Марс.
Показать полностью
2

НАСА раскрыло зону полета первого дрона на Марсе
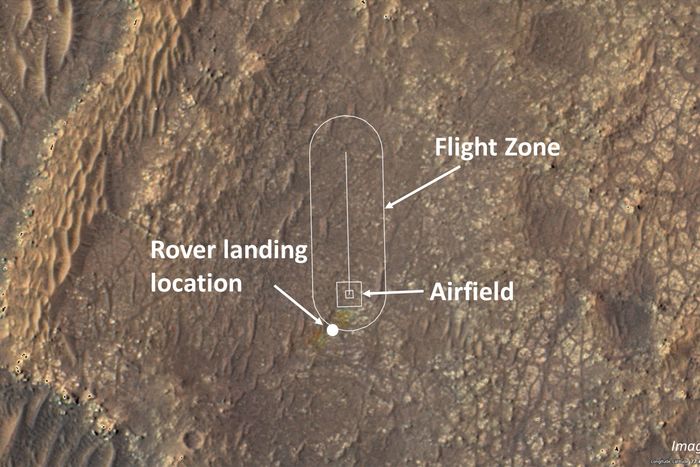
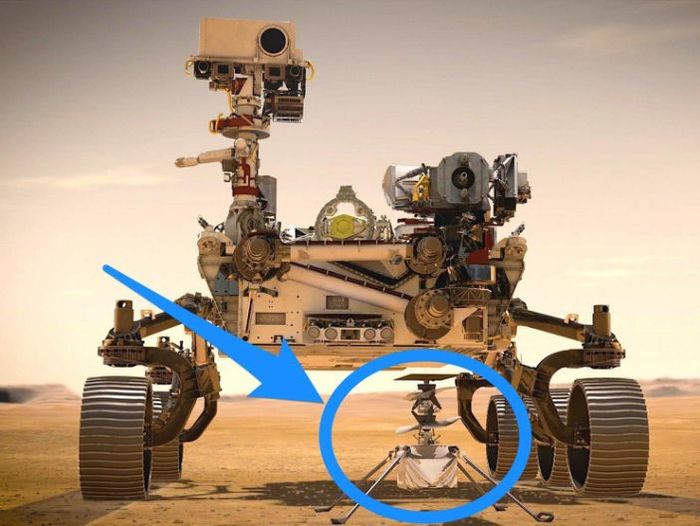
Инженеры объявили во вторник, что НАСА зафиксировало место на Марсе для первого демонстрационного полета своего дрона под названием Ingenuity. Четырехфунтовый винтокрылый аппарат готовится совершить первый полет на другой планете, демонстрируя новые возможности, которые в будущем могут открыть доступ к труднодоступным местам других небесных тел.
Ingenuity прибыл на Марс в феврале на марсоходе Perseverance. В течение нескольких часов после приземления Perseverance инженеры начали анализировать орбитальные снимки, чтобы найти лучшую зону полета, в которой Ingenuity может совершить свой первый полет — «зону, где безопасно взлетать, а также безопасно приземляться», — сказал главный пилот корабля Ховард Грип.
По его словам, посадочная площадка должна быть плоской и без каких-либо крупных камней, которые могут угрожать демонстрационным полетам Ingenuity. Но он также должен иметь «текстуру» — отличительные особенности на земле, которые навигационная камера вертолета на базе искусственного интеллекта может обнаружить, чтобы отследить его местонахождение во время полета. Вскоре после приземления «мы начали понимать, что у нас может быть действительно отличный аэродром прямо перед носом», — сказал Грип репортерам на брифинге для прессы во вторник.
Perseverance находится в движении к зоне полета, всего в 196 футах от места приземления. Когда он прибудет, дрон будет спущен на землю. Затем Perseverance проведет примерно 25 часов в пути на расстоянии около 330 футов к месту, которое НАСА назвало Van Zyl Overlook в честь Якоба Ван Зила, старшего научного сотрудника Лаборатории реактивного движения, который умер в прошлом году.
По словам Фарах Алибей, которая руководит интеграцией Ingenuity с Perseverance, передача Ingenuity в зону ее полета — «очень строгий и кропотливый процесс». Перед тем, как коснуться земли, нужно будет переключить Ingenuity из его текущего горизонтального положения на марсоходе в вертикальное, что займет «несколько дней», — сказала она. «Самым напряженным днем, по крайней мере для меня, будет тот последний день, когда мы наконец отделим дрон и установим Ingenuity на землю».

Lockheed Martin разработала систему, которая поможет Ingenuity приземлиться. Обеспечение легкости и безопасности этой системы было огромной проблемой даже для Lockheed, имеющей многолетний опыт проектирования космических систем. «Нам пришлось отбросить все это наследие и знания и буквально начать с нуля с новой схемой электрических соединений», — сказал в интервью The Verge Джереми Морри, главный инженер Lockheed по системе развертывания.
Инженеры НАСА ожидают, что Ingenuity проведет свои первые летные испытания не раньше 8 апреля, плюс-минус несколько дней в зависимости от погоды на Марсе. Зона полета вертолета имеет форму беговой дорожки с квадратной зоной взлета и посадки на одной стороне зоны. «Первый полет особенный — это, безусловно, самый важный полет, который мы планируем совершить», — сказал Грип, добавив, что успешный первый полет будет означать «полный успех миссии».
Для этого дебютного полета Ingenuity будет подниматься на высоту почти 10 футов (3 метра), зависать на месте около 30 секунд, разворачиваться в воздухе, а затем снижаться для приземления. Он будет полностью автономным и будет работать по командам, отправленным инженерами с Земли накануне. 0,5-мегапиксельная навигационная камера на нижней стороне Ingenuity будет делать 30 снимков земли в секунду, чтобы информировать о ее движении.
У Ingenuity есть еще одна, более мощная камера с 13 мегапикселями, обращенная к горизонту. Она сделает снимки в воздухе, а камеры на борту Perseverance будут стремиться запечатлеть дрон в полете. Все эти изображения в конечном итоге будут отправлены обратно на Землю.

Показать полностью
2
Первые фото вертолета Ingenuity на Марсе
Защитная панель сброшена, вот так выглядит первый вертолёт на Марсе. Он сложен и зафиксирован на месте, так что нужно постараться, чтобы развернуть его. Но сначала марсоход отправится на "вертолётную площадку" в паре дней езды

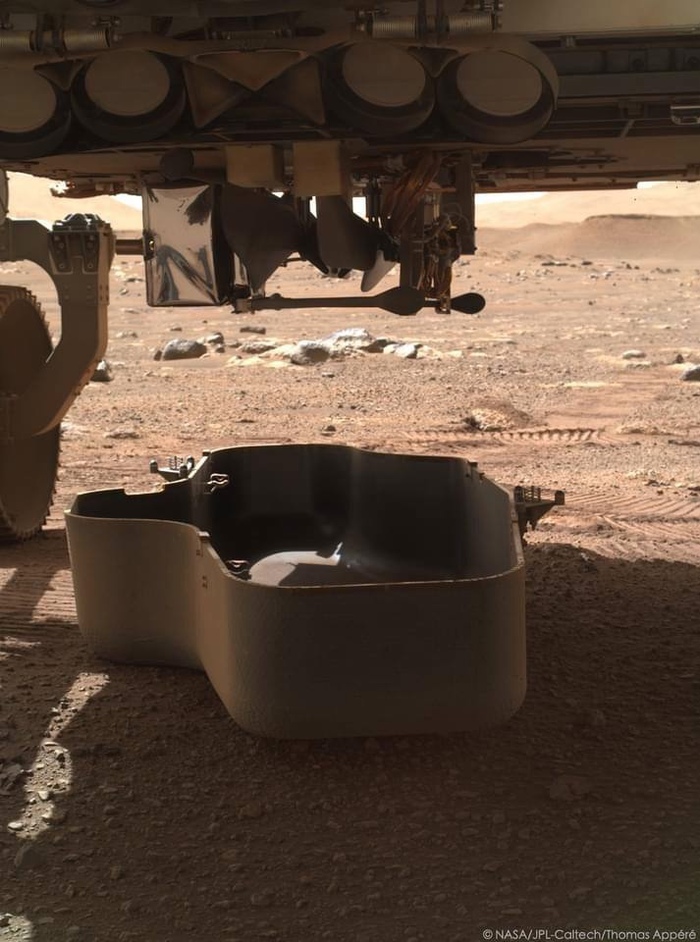
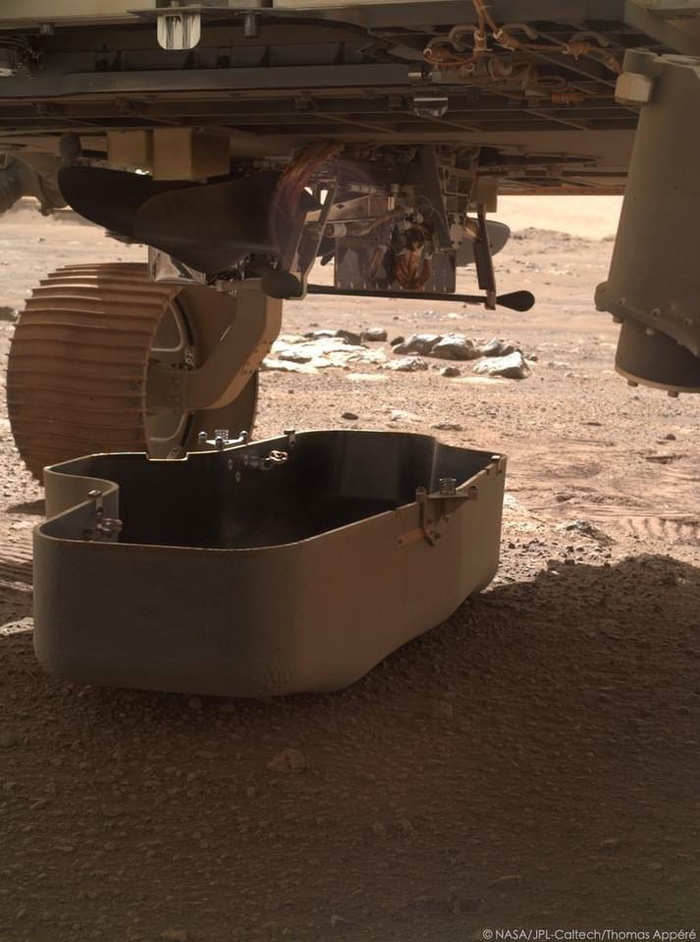
Судя по пресс-киту миссии, от сброса защиты до полёта около 10 солов, если всё пройдёт гладко.

Показать полностью
4
Марсоход НАСА «Perseverance» готовится запустить БПЛА (соосный вертолёт) «Ingenuity»
Роторный БПЛА «Ingenuity» стоимостью 85 миллионов долларов может стать пионером нового подхода к исследованию других планет. Хотя пока это всего лишь демонстрация, этой весной дрон должен совершить до пяти испытательных полетов. Две камеры на его нижней стороне должны снимать поверхность Марса сверху, пока он летит.
В январе уже провалилась другая новаторская идея — "Мole", который был на посадочном модуле НАСА InSight, - это дрон, который должен был закопаться глубоко в марсианский грунт, но не смог выполнить свою миссию из-за неожиданно толстой почвы.
Показать полностью
1

О первом марсианском вертолёте: интервью с разработчиком Ingenuity
О первом марсианском вертолёте: интервью с разработчиком Ingenuity
Как уже большинство из вас уже наверняка знают, марсоход NASA Perseverance совершил успешную посадку на Марс. Но в этом материале мы поговорим не о самом марсоходе, а о небольшом попутчике, спрятавшемся в нижней его части.
Конечно же, речь пойдёт об Ingenuity – небольшом винтокрылом аппарате, чей расположенный под парой 120-сантиметровых винтов корпус размером с коробку из под салфеток держится на четырёх тоненьких опорах. Ingenuity имеет массу всего 1,8 килограмма, но важность его миссии нельзя недооценивать, поскольку если всё пойдёт как задумано, то ему суждено стать первым летающим аппаратом на Марсе.
Инженеры NASA модифицируют лётную модель Ingenuity. Credit: Photo: NASA/JPL-Caltech
Чтобы это сработало, Ingenuity придётся справиться с низкими температурами, ограничениями по мощности и совершить серию 90-секундных полётов на расстоянии десяти световых минут от Земли. Связь и управление в режиме реального времени невозможны.
Переоценивать миссию Mars Helicopter, в рамках которой и планируются эти полёты, тоже не стоит. Это демонстрация технологии. Основная цель – совершить полёт на Марсе, точка. Ingenuity не будет заниматься сбором научных данных, подобно тому, как это будет делать Perseverance. Если повезёт, то аппарат сделает пару снимков в полёте, но не более того. Важность и ценность его миссии состоит в том, чтобы показать саму возможность полётов на Марсе, а также собрать ценные данные, которые следующему поколению марсианских винтокрылых аппаратов позволят делать что-то более амбициозное и захватывающее.
Наглядное представление о том, что представляет из себя аппарат Ingenuity
Ingenuity не предназначен для решения сложных задач – аппарат сложный сам по себе. Отправиться в управляемый полёт на Марсе невероятно тяжело по целому ряду причин, среди которых очень тонкая атмосфера (около 1% от плотности земной), жёсткие требования к мощности и ограничения в связи.
По словам операционного руководителя миссии Mars Helicopter из Лаборатории реактивного движения (JPL) Тима Кэнхэма, доставка Ingenuity на Красную планету в целости и сохранности, чтобы затем аппарат благополучно совершил первый марсианский полёт – настоящая победа для NASA. Кэнхэм участвовал в разработке программной архитектуры, на которой работает Ingenuity. Как операционный руководитель, Тим сосредоточен на планировании полётов аппарата и координации действий с командой марсохода Perseverance. Издание IEEE Spectrum поговорило с Кэнхэмом, чтобы лучше понять, как Ingenuity будет использовать свою автономность в предстоящих полётах.
Что вы можете рассказать об аппаратуре Ingenuity?
Поскольку Ingenuity входит в число демонстрационных миссий, JPL могла позволить себе рисковать по-крупному. Главные беспилотные миссии, вроде марсоходов или аппаратов, исследующих дальний космос, называются миссиями класса B. В таких миссиях множество людей работают над созданием надёжного оборудования и ПО в течение многих лет. Демонстрационная же миссия открывает JPL возможность попробовать вести дела по-новому. Фактически, мы взяли и использовали много готового потребительского оборудования.
В Ingenuity есть некоторые очень прочные и радиационно-устойчивые компоненты авионики, но большая часть аппаратуры – коммерческое оборудование. Например, мы использовали процессорную плату Snapdragon 801 от компании Qualcomm. По сути, это процессор для смартфонов с очень маленькой платой. Но поскольку это относительно современная технология, она намного мощнее аналогов, установленных на марсоходе. На самом деле у нас на пару порядков больше вычислительной мощности, чем у Perseverance. Нам она очень нужна. Чтобы поддерживать контроль полёта в атмосфере, наши контуры наведения работают с частотой 500 Гц. Кроме того, Ingenuity будет делать снимки, отслеживания изменения на них с частотой 30 Гц. Для такой задачи требуется серьёзная вычислительная мощность. И никакая используемая в данный момент NASA авионика не готова такую мощность предоставить. В некоторых случаях мы буквально заказывали компоненты у SparkFun Electronics. Мы думали об этом так: «Что-ж, это коммерческое оборудование. Но если мы его протестируем, и оно покажет себя хорошо, то мы будем его использовать».
Можете описать, какие датчики Ingenuity будет использовать для навигации?
Мы используем обычный гиростабилизатор для смартфона, лазерный высотомер от SparkFun, и направленную вниз VGA-камеру для отслеживания особенностей поверхности в монокулярном режиме. Определение относительного положения будет осуществляться за счёт покадрового сравнения нескольких десятков объектов на поверхности – это поможет определить направление и скорость с которыми движется аппарат. Всё это делается путём оценки местоположения на ходу, а не путём запоминания объектов или составления карты.
Винтокрылый аппарат NASA Ingenuity. Вид снизу на лазерный высотомер и навигационную камеру. Credit: NASA/JPL-Caltech
Ещё на борту имеется инклинометр, который будет использоваться для оценки наклона относительно поверхности во время взлёта, а также 13-мегапиксельная цветная камера, какую можно встретить в каком-нибудь смартфоне. Она не будет использоваться для навигации, но с её помощью мы попытаемся сделать несколько классных снимков в ходе полёта. Она называется RTE. Потому что вся аппаратура должна иметь аббревиатуру. На ранних этапах разработки у нас также была идея включить в аппаратную часть систему обнаружения опасностей, но времени на это не хватило.
Ingenuity будет работать автономно. В каком смысле?
В некотором смысле вы можете думать об Ingenuity как о традиционном космическом аппарате от JPL. У него есть бортовой компьютер, для которого мы пишем серию команд. Загружаем файл с этой последовательностью в аппарат, а он её выполняет. Навигационную часть полёта мы планируем в ходе моделирования здесь, на Земле, в виде серии путевых точек, представляющих собой последовательность команд, отправляемых нами навигационному ПО. Когда мы захотим, чтобы аппарат взлетел, мы приказываем ему лететь. Навигационное ПО берёт на себя управление и выполняет взлёт, переход к различным путевым точкам и следующую за этим посадку.
Это значит, что полёты очень точно спланированы заранее. Это не настоящая автономия. В том смысле, что мы не ограничиваем Ingenuity какими-то целями и правилами, и аппарат не делает никаких бортовых вычислений на высоком уровне. Это своего рода автономия наполовину. Противоположность – это человек, сидящий и управляющий аппаратом с помощью джойстиков. На Марсе мы, очевидно, не можем сделать подобного. В рамках проекта не было времени на разработку действительно автономной системы, поэтому мы заранее сообщаем Ingenuity план полёта, и он выполняет задуманную для него траекторию. Во время полёта он самостоятельно будет пытаться убедиться, что остаётся на заданной траектории с учётом наличия порывов ветра или иных факторов, которые могут возникнуть в окружающей среде. Но аппарат изначально разрабатывался таким образом, чтобы следовать по спланированной на Земле траектории.
Однако Ingenuity не обязан доказывать концепцию продвинутой автономности. На мой взгляд, если бы мы говорили ему что-нибудь вроде «иди и сфотографируй тот камень», то это делало бы аппарат гораздо более автономным. Основная цель Ingenuity – доказать, что мы можем летать на Марсе. Нами сейчас разрабатываются концепции будущих миссий, подразумевающих отправку на Марс более крупного вертолёта с гораздо большей автономностью. Но вспомните миссию Mars Pathfinder, в рамках которой по Красной планете прокатился самый первый марсоход. У него была очень простая миссия: объехать посадочную платформу, попытаться сделать несколько снимков и взять образцы каких-то камней. Поэтому, когда речь заходит о демонстрационной миссии, мы стараемся скромно относиться к тому, что пытаемся сделать.
Существуют ли ситуации, в которых Ingenuity может по каким-то причинам отклониться от заданной траектории?
Навигационное программное обеспечение всегда следит за тем, чтобы все датчики были исправны и давали хорошие данные. Если датчик выходит из строя, у аппарата есть одно решение, которое заключается в том, чтобы принять последнее сохранённое состояние, попытаться совершить посадку, а затем сообщить нам, что произошло и ждать, пока мы решим проблему. Ingenuity не будет пытаться продолжить полёт в случае отказа какого-то датчика. Данные со всех трёх используемых для полёта датчиков дополняют друг друга – поэтому полёт прекратится, если один из них откажет.
Полёт Ingenuity в представлении художника. Credit: NASA/JPL-Caltech
Как вы будете решать, куда лететь?
Мы будем делать то, что называем процессом выбора места. Процесс стартовал ещё до прибытия Perseverance с осмотра полученных с орбиты изображений потенциального места посадки. Снимки с орбиты – довольно грубый и неточный способ определения потенциальных участков высадки. Уточнение данных произойдёт тогда, когда марсоход сделает обширное исследование местности. Мы выберем место для работы Ingenuity исходя из каменистости, уклона и некоторых других свойств поверхности. Тут есть некоторые компромиссы, поскольку самая безопасная поверхность – это поверхность без каких-либо особенностей, без камней. Но это же и худший вариант с точки зрения навигации. Поэтому мы должны найти золотую середину: участок с множеством маленьких камней, по которым можно ориентироваться, но без больших камней, усложняющих посадку.
Какого рода полёты выполнит аппарат?
Так как это первый в своём роде эксперимент, мы запланировали три экспериментальных полёта, в каждом из которых Ingenuity сядет на то же место, откуда он стартовал – так безопаснее. Для полётов у нас ограниченное 30-дневное окно. Если мы успеем, то попробуем совершить посадку в каком-нибудь месте, отличном от стартового. Но первые три полёта точно окончатся посадкой на том же самом месте, откуда аппарат взлетел.
JPL имеет опыт создания аппаратов, способных оставаться в работе долгое время после выполнения своей основной миссии. Значит ли это, что (если не произойдёт чего-нибудь плохого) по окончанию 30-дневной миссии Ingenuity, аппарат Perseverance в конечном итоге попросту уедет от идеально работающего марсианского вертолёта?
Да. Таков план, поскольку марсоходу необходимо выполнять свои основные задачи. А поддержание миссии Mars Helicopter требует ресурсов. Нам предоставили 30-дневное окно для испытаний, за что мы очень благодарны. Но марсоход двинется дальше независимо от того, в каком состоянии будет пребывать Ingenuity. Какие бы невероятные и сумасшедшие вещи мы не хотели сделать, мы должны уложиться в 30 дней. На самом деле, два последних полёта у нас ещё не запланированы. В зависимости от того, как быстро пройдут первые три полёта, у нас может остаться неделя или около того, чтобы попробовать что-нибудь более экзотическое. Но первые три попытки у нас в приоритете.
Наш окончательный критерий успеха – совершить один полёт. Будем вне себя от радости, если нам это удастся. Следующие два полёта дадут нам возможность действовать смелее. В конце концов мы можем прийти к чему-то совсем уж приключенческому. Вроде того, чтобы сделать большой круг или отлететь на сотню метров. Всё дело в том, чтобы понять, как аппарат летает. Вот как в первый раз полетит – тогда и поговорим.
Допустим, что в первых четырёх попытках у вас всё прошло отлично. Осталась одна. Вы бы предпочли попробовать что-то действительно смелое, что может не сработать, или что-то более безопасное, что с большей вероятностью сработает, но не даст вам опыта?
Это хороший вопрос, и нам нужно ещё подумать над этим. Если у нас осталась одна попытка, а марсоход всё равно оставит нас, то, может, мы попробуем что-нибудь смелое. Но пока мы далеки от этого. Наши основные усилия сосредоточены на первых трёх полётах, всё остальное – это бонус.
Есть ли что-нибудь ещё, чем вы можете с нами поделиться, что могло бы заинтересовать инженеров?
Это будет первый раз, когда на Марсе будет запущена Linux. Да, мы на самом деле работаем на Linux. Фреймворк, который мы используем, был разработан нами в JPL для кубсатов и научных приборов – мы открыли его исходный код несколько лет назад. Так что вы можете взять фреймворк, который летает на марсианском вертолёте, и использовать его в своём собственном проекте. Это своего рода победа открытого исходного кода: мы используем операционную систему с открытым исходным кодом и платформу программного обеспечения для полётов с открытым исходным кодом, а также коммерческие компоненты, которые можно купить в готовом виде (если когда-нибудь захотите сделать что-то самостоятельно). Для JPL такое в новинку, потому что обычно нам нравится то, что безопасно и проверено. Но многие люди очень рады новому подходу, и мы с нетерпением ждём, когда всё это заработает.
Источник
https://spectrum.ieee.org/automaton/aerospace/robotic-explor...


Показать полностью
3
1
Миссия Perseverance: настойчивое желание покорить небо, чтобы спуститься под землю
Второй раз в своей истории человечество запустит летательный аппарат под чужим небом — и впервые в истории он будет тяжелее местного «воздуха». Помимо этого, Perseverance сможет прояснить ряд вопросов, имеющих заметное значение для изучения и даже колонизации Марса. Впрочем, можно с большой долей уверенности предсказать и то, чего он не сможет: решить вопрос, есть ли жизнь на Марсе. Но это уже не его вина, а общая проблема непилотируемых экспедиций на Красную планету. Разбираемся в деталях.
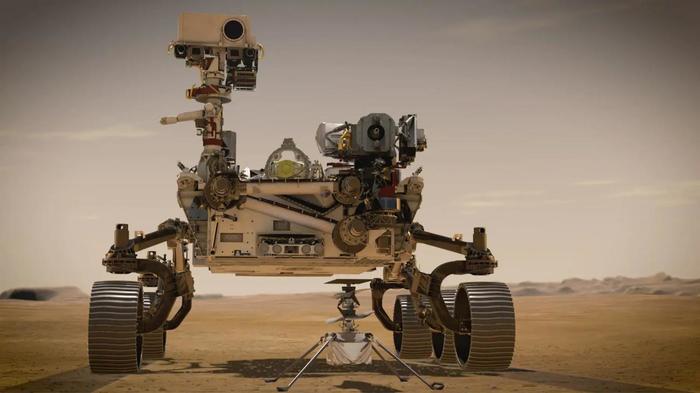
Марсоход Perseverance и, рядом с ним, первый внеземной вертолет, Ingenuity. Подобные ему в перспективе могут использоваться для изучения огромных марсианских пещер / ©NASA-JPL
В июле 2020 года NASA отправило на Марс новый планетоход, а вчера, 18 февраля, он, наконец, достиг поверхности Красной планеты. Точкой высадки стал кратер Езеро — в прошлом довольно крупное озеро, рядом с которым до сих видно высохшую дельту когда-то впадавшей в это озеро реки.
Название кратера похоже на русское слово «озеро» потому, что назвали его в 2007 году в честь города Езеро в Республике Сербской (Босния и Герцеговина), и слово это означает именно «озеро».
Надежды на обнаружение жизни: чисто теоретические
Место посадки выбрали не столько потому, что там был водоем. На Марсе вообще немало былых озер, морей и рек. И ранее тот же Curiosity уже проходил по таким местам. Но у Езеро есть то, что в других местах редкость — орбитальные снимки NASA показали, что по краю этого кратера идут карбонатные породы. На Земле подобные породы — часто след былой жизни.

Так в представлении художника выглядело марсианское озеро Езеро миллиарды лет назад / ©NASA/JPL-Caltech
Известно, что в теории в марсианских условиях могут существовать цианобактерии. В прошлом Земли они часто образовывали цианобактериальные маты — их еще называют «строматолитами». На нашей планете их возраст достигает 3,7 миллиарда лет, и иногда ветер обнажает наносы над ними так, что следы древних цианобактерий оказываются едва ли не на поверхности. В теории аналогичное событие у Езеро способно позволить Perseverance исследовать остатки древней марсианской жизни.
К сожалению, это теория, а на практике выставленные «наружу» древние карбонатные породы могут быть так сильно изменены ветровой эрозией (бомбардировкой пылью и песчинками), а равно и космической радиацией, что их изучение не позволит однозначно интерпретировать находку вполне настоящих строматолитов.
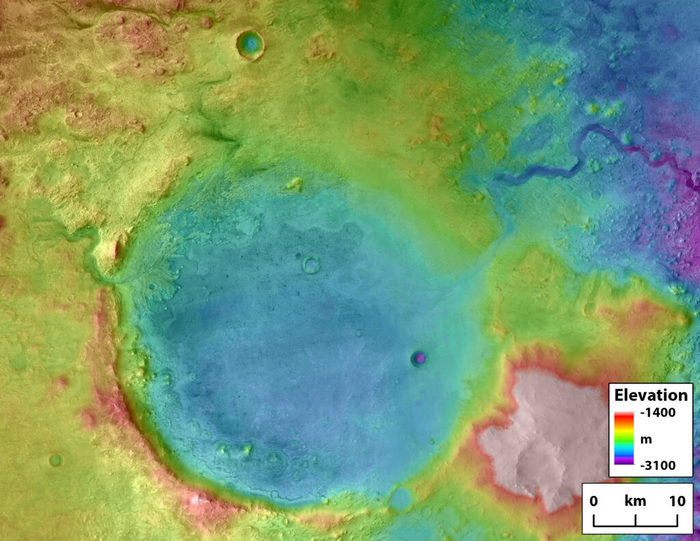
Современная ситуация с кратером Езеоро. Искусственными цветами обозначены высоты / ©NASA/JPL-Caltech
Разумеется, рядом, буквально под десятками сантиметрами песка, могут быть и неплохо сохранившиеся следы древней жизни. Но «достать» до них нечем: имеющиеся у Perseverance инструменты, как и у его брата-близнеца Curiosity, банально не позволяют углубляться в грунт более чем на несколько сантиметров.
А чем он все-таки отличается от Curiosity?
Мы упомянули, что системы для сверления поверхностных пород у нового планетохода те же, что у старого, еще работающего на Марсе спустя девять лет после высадки. Но есть у новой машины и отличия — причем весьма интересные.
Во-первых, это самый тяжелый из когда-либо созданных людьми планетоходов. Если Curiosity весил 900 килограммов, то новый аппарат — 1025 килограммов. Основное утяжеление — результат изменения шести колес машины. На Curiosity алюминий ободьев оказался выбран не совсем корректно: слишком тонкий. В итоге местный грунт быстро наделал в нем дырок. Двигаться все еще можно, но проходимость от этого, конечно, не улучшилась, а затраты энергии при движении возросли.
Сами колеса Perseverance — для увеличения все той же проходимости — прибавили в диаметре, составив 525 миллиметров против 500 миллиметров у Curiosity. Спицы колес оставили титановыми, но изогнули, чтобы повысить общую прочность колес. Все это не пустая перестраховка: главная причина гибели всех планетоходов — их застревание в грунте. Поэтому лучшая надежность колес имеет большое значение.
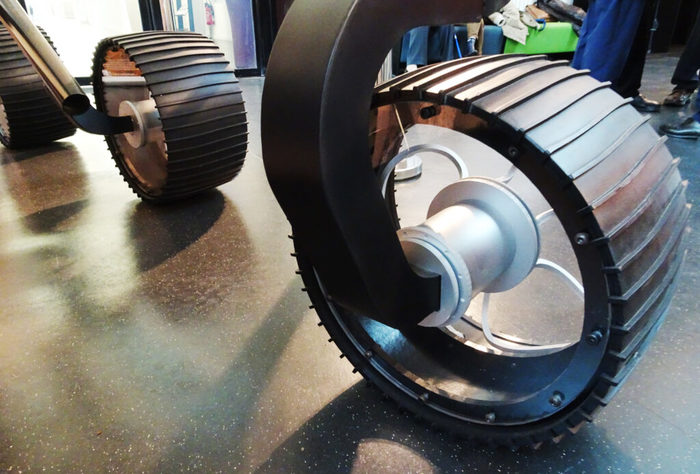
Колеса Perseverance / ©Wikimedia Commons
Другое важное отличие: аппарат MOXIE, которого на старом марсоходе не было. MOXIE поставит эксперимент по разложению СО2 — главного газа марсианской атмосферы — на СО и О2 (угарный газ и кислород). Теоретическая польза от эксперимента очевидна: он покажет, реально ли получать кислород прямо из марсианского «воздуха», где собственного кислорода практически нет. MOXIE должен нарабатывать до 22 граммов О2 в час на протяжении 1230 часов — примерно такое количество кислорода в единицу времени поглощает человек под регулярными физнагрузками. Казалось бы, это поможет будущим пилотируемым экспедициям.
Практически все не так красочно. Добывать кислород из крайне разреженной местной атмосферы более энергозатратно, чем при банальном разложении воды на кислород и водород электролизом. 15-килограммовый MOXIE потребляет 300 ватт при пиковой нагрузке (впрочем, недолгой). Практически все планировщики будущих пилотируемых экспедиций считают, что высаживать их надо там, где близко к поверхности Марса находится водяной лед. Разложив его воду, получить кислород куда проще.
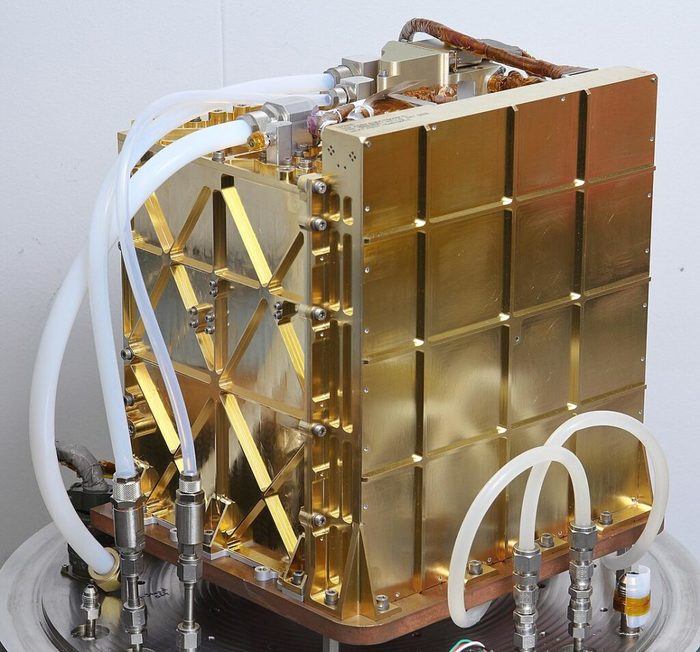
Алюминиевые пластины электродов MOXIE покрыты тонким слоем золота / ©NASA/JPL-Caltech
Вот только марсоход не умеет копать. Поэтому ему, как жертве интоксикации этиловым спиртом из анекдота, приходится «искать ключи не там, где потерял, а под фонарем, где светлее» — ставить не тот эксперимент, что полезнее всего для будущих экспедиций, а тот, который позволяют весьма ограниченные возможности земных планетоходов.
Третье важное отличие от Curiosity: российский нейтронный детектор воды ДАН разработки Института космических исследований РАН заменили на радар RIMFAX, направленный вниз и излучающий на частоте в 150-200 мегагерц. Он, в отличие от нейтронного детектора, плохо видит воду, связанную в минералах. Зато должен различать водяной лед и следы жидкой воды на глубине до 10 метров. Это крайне важный прибор: ДАН видел воду не глубже пары метров. А чем глубже, тем выше температура — и вероятность наличия жидкой соленой воды. Правда, насыщенные водой минералы ему различать заметно сложнее, в отличие от нейтронного детектора.
В теории часть собранных Perseverance образцов в 2026 году может быть забрана следующим марсоходом NASA и затем отправлена на Землю. Смысл в том, что «транспортный» марсоход будет легче «универсального». А доставка образцов с Марса на нашу планету и так потребует экспедиции с огромной посадочной массой: чтобы взлететь с Красной планеты, топливо придется привезти с Земли.
Наконец, есть одно отличие, которое глазами не заметишь, но душу американской стороне оно все же греет. Perseverance импортозаместил источник энергии: на его борту не российский плутоний-238, а американский аналог, производство которого в последние годы, наконец, наладили в Соединенных Штатах. Мощность радиоизотопного генератора на этом плутонии осталась той же: чуть более 100 ватт, примерно как мощная лампочка накаливания.
Отдельная миссия: второй летательный аппарат под чужим небом
Perseverance несет с собой легкий дрон Ingenuity. Технически это вертолет соосной схемы типа «камовских». Размах лопастей там 1,2 метра, вес — всего 1,8 килограмма. Скорость вращения лопастей составит до 40 оборотов в секунду. Такие огромные размеры и скорость вращения нужны потому, что атмосфера Марса по плотности в 100-150 раз уступает земной. Эксперименты в гермокамере показали, что при меньших параметрах аппарат там просто не взлетит.
Дрон Ingenuity / ©Wikimedia Commons
Мощность дрона — до 350 ватт, больше, чем у источника энергии марсохода. Поэтому мини-вертолет сперва накапливает заряд в бортовой литиевой батарее на 0,27 килограмма, а затем летит, но не дольше трех минут.
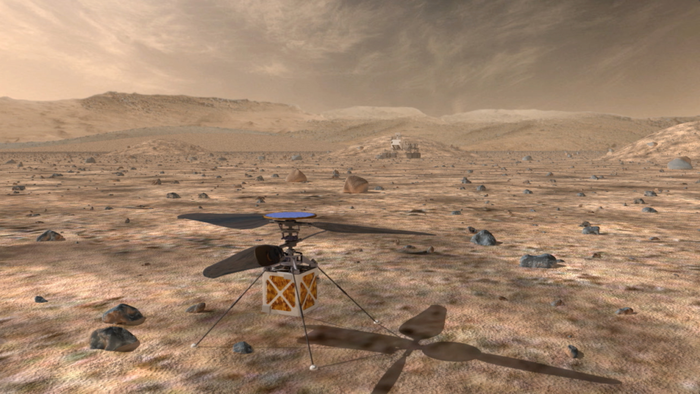
Чтобы не оставить Ingenuity без заряда, его не будут отпускать от марсохода более чем на сотню метров. Однако для будущих миссий ситуация может несколько измениться. В случае изучения спусков в лавовые трубки Марса дрон потенциально почти незаменим. Дело в том, что роботы исключительно плохо двигаются по сложным наземным поверхностям (что и погубило немало марсоходов даже на равнине). А вот полет — сравнительно однородное занятие, где даже без человеческого интеллекта выживание аппарата более вероятно.
Поэтому дроны — едва ли не единственный реальный путь разведки марсианских лавовых пещер. Считается, что там немало водяного льда. А подальше от входа может быть и значительно теплее, чем на поверхности. Было бы неплохо проверить обе эти гипотезы, потому что тепло и вода — хорошие предвестники возможной жизни. Кстати, ряд ученых уверены, что искать ее на Марсе следует именно в таких трубках.
Разумеется, Ingenuity — лишь первый шаг на этом пути. Для полноценной разведки пещер потребуются куда более крупные аппараты, но сперва надо проверить, справляется ли там хотя бы мелкий, «учебный» дрон.
Если Ingenuity удачно взлетит, это будет огромное достижение. До сих пор аппарат, предназначенный для длительного полета под небом чужой планеты, летал только у СССР — и очень давно, аж в 1984 году (миссии «Вега-1» и «Вега-2»). Прошло уже более 36 лет — пора, наконец, обновить то давнее достижение.

Аэростат миссии «Вега», экземпляр с земных испытаний / ©Wikimedia Commons
Подведем итоги. Perseverance — не слишком дорогая (порядка 2,5 миллиарда долларов) автоматизированная миссия, которая, скорее всего, сможет проработать на Марсе много лет. Как и все подвижные космические автоматы, она недостаточно универсальна, чтобы решить вопрос, «есть ли жизнь на Марсе». Даже пройдя буквально в метре над подпочвенной бактериальной колонией, Perseverance ничем не сможет до нее добраться: нет нормального бура.
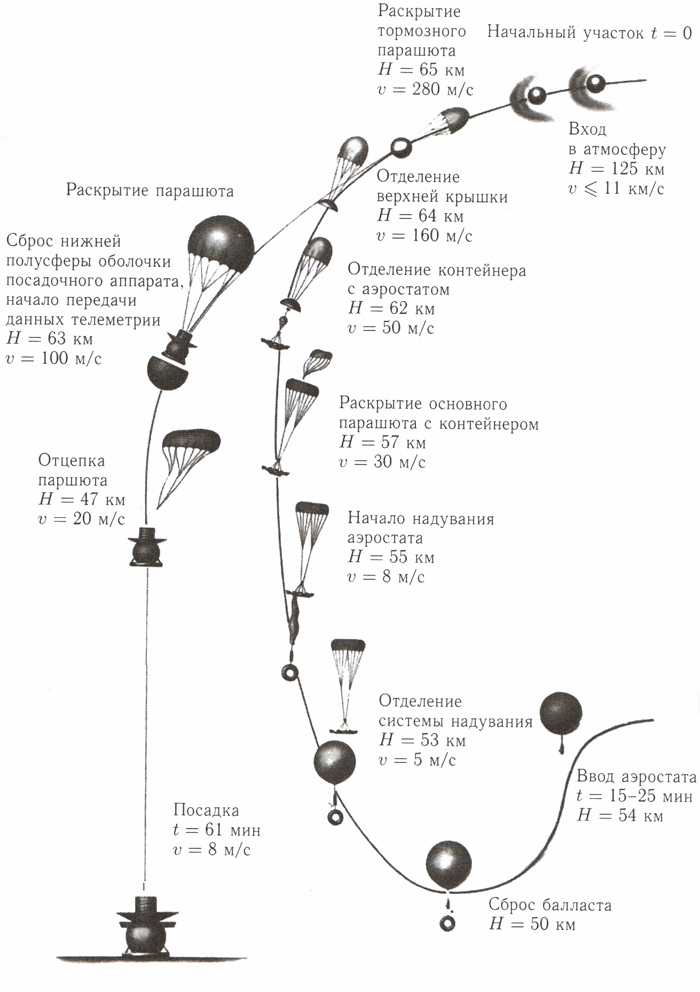
Схема полета первого атмосферного летательного аппарата, созданного специально для других планет, советского аэростата миссии «Вега» / ©Wikimedia Commons
Но это не его особенность: современные планетоходы в принципе лишены таких возможностей. Даже не требующие мобильности неподвижные посадочные аппараты типа Insight NASA не могут успешно копать более чем на десятки сантиметров в глубину.
Однако ограниченность возможностей миссий на Марс — не навсегда. С высокой вероятностью в ближайшие десять лет туда отправится носитель с возможностями Starship, более крупной посадочной платформы, чем когда-либо созданные человечеством. Если это случится, на Марсе окажутся и люди. А им, безусловно, удастся докопаться до марсианской подповерхностной жизни — если она там, конечно, есть. Ведь, в отличие от роботов, наши конечности куда универсальнее, а ум — намного гибче.
Автор: Александр Березин
Источник: Naked Science
Показать полностью
8
Инфографика: марсианский вертолёт Ingenuity
Инфографика: марсианский вертолёт Ingenuity
Марсоход Perseverance должен подлететь к Марсу и совершить (по крайней мере, я очень на это надеюсь) мягкую посадку уже на днях – 18-го февраля 2021-го.
Он, безусловно, важная, но, как по мне, не самая интересная часть мисси Mars 2020 – шасси как у Curiosity с небольшими изменениями, да новый набор научного оборудования. Внешне всё более или менее то же самое. А вот чего в истории космонавтики ещё никогда не случалось, так это испытания специального вертолёта – Ingenuity.
Это демонстратор технологии, который должен подтвердить — да, на Марсе можно летать, и мы знаем как это делать.
По такому случаю я сделал постер-инфографику с небольшой информацией об этом винтокрылом аппарате.
На русском
Ссылки на другие места, где можно посмотреть принты с этой картинкой.
Другие статьи с моей инфографикой на thealphacentauri.net
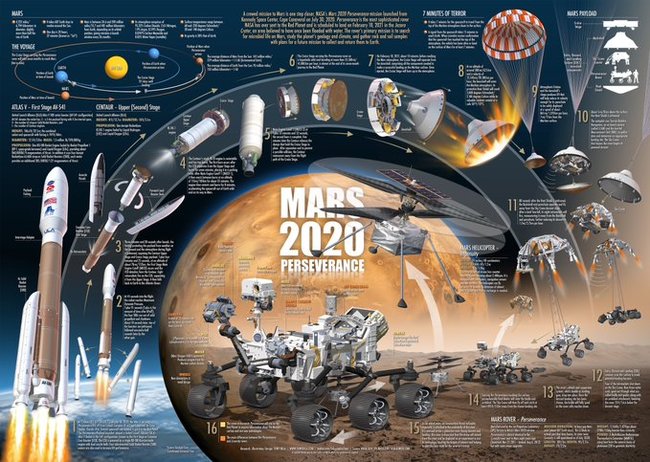
Инфографика по Mars 2020
Мопед не мой Картинки не мои, но пока я искал материал для инфографики, наткнулся на достаточно свежую статью на Financial Times с симпатичной инфографикой по мисси Mars 2020 от иллюстратора по имени Ian Bott.
Инфографика по миссии Mars2020 от Tony Bela
https://www.ft.com/content/13f193f5-4fcd-4e71-a5cd-dd6fa9c6a...
P.S. Если вы заметите фактические неточности, опечатки, неверное использование терминов или просто криво составленные фразы (особенно в английской версии), буду очень признателен если вы укажете на них.
UPD: Поправил опечатки и ошибки, спасибо Марку Романову, добавил ссылки на твиты Tony Bela с инфографикой по миссии Mars2020.
https://thealphacentauri.net/author/3451/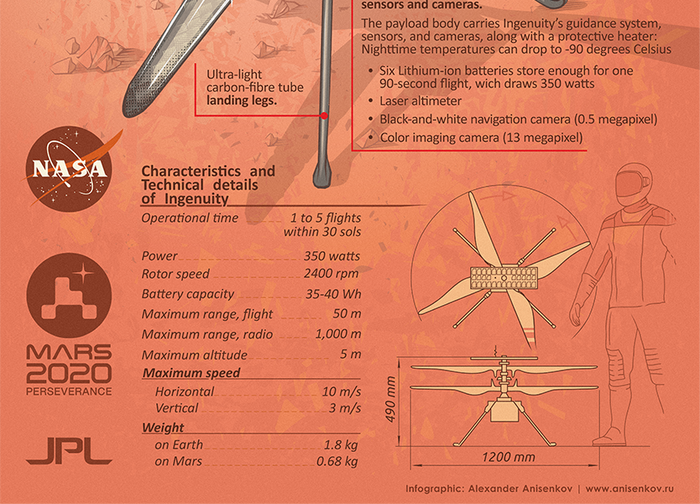




Показать полностью
6