
Светильник. Просто светильник)



Показать полностью
4
Польские инженеры создали роботизированную руку с мышцами и сухожилиями как у человека— она выглядит и двигается как настоящая. Цель польского проекта создать полноценного киборга с максимальным сходством с человеческой анатомией.
Продолжение фотоэкшена с фестиваля ждет вас тут – открывайте!
Кстати, в 2018 году на Geek Picnic в Москве мы подписывали Меморандум о правах киборгов.

В понятие киборгов входят не только люди с протезами. Тут есть целый список интеграций в человеческое тело, которые преобразуют человека, это:
– Функционирующие протезы верхних и нижних конечностей;
– Инвазивные нейроимпланты;
– Кохлеарные и сердечные импланты;
– Желудочный стимулятор;
– Инсулиновые помпы;
– Кардиостимулятор;
– Импланты костей, суставов и других внутренних органов;
– Интегрируемые в тело человека медицинские устройства по анализу, сбору данных и поддержке нормальной работы; процессов внутренних органов;
– Устройства для телеметрии, аутентификации, платежей;
–Любые сертифицированные технические элементы и устройства, вживленные в человека.
Так что любая бабушка со кохлеарным имплантом вполне себе киборг! Ну, а пока к остальным фотографиям с Geek Picnic 2021.


















Ну, и напоследок, вдруг-таки вы долистали, пара закатных видов на Москва-сити:



Доброго утра, Пикабу
Пришло время продолжения вот этих простыней :
Интерфейсы мозг-компьютер. Часть 1. Речевые интерфейсы
Интерфейсы мозг-компьютер. Часть 2. Моторные интерфейсы
Интерфейсы для управления киборгами
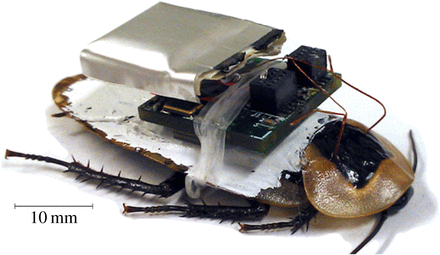
Авторы работы [4] создали киборга путем хирургического соединения портативного микростимулятора с нервами антенн живого таракана. Применяя специальную микростимуляцию, киборгом можно дистанционно управлять поворотами влево и вправо. Намерение движения может быть получено из человеческого мозга через интерфейс мозг-компьютер. Электроэнцефалография (ЭЭГ) на основе установившегося визуального вызванного потенциала (SSVEP) использовалась для передачи намерений человека. Были разработаны и проведены эксперименты с различными вариантами испытаний для проверки производительности предложенной системы. Результаты экспериментов показали, что средние показатели успешности реакций человеческого ИМК и киборга в одном решении превышали 85%. Киборгом можно было успешно управлять через человеческий мозг, чтобы он мог пройти по заранее заданным дорожкам с 20% успешностью.
Структура разработанной системы показана на рис. 1. ИМК на основе SSVEP с тремя состояниями использовался для декодирования намерения контроллера. Три мигающих квадратных блока представляли источник стимуляции SSVEP , которые были расположены отдельно вверху в середине, внизу слева и внизу справа на экране ПК. Частота мерцания каждого блока была установлена равной 12,5, 8,33, 6,818 Гц, обозначая команды управления покоя, левого и правого поворота соответственно. Человек (контролер) сидел перед экраном ПК, чтобы управлять направлением, с портативным устройством захвата ЭЭГ.

Таракан-киборг был разработан после несложной хирургической операции. Авторы хирургическим путем установили микростимулятор на таракана, вставив три крошечные серебряные иглы (левый, правый, заземляющий электрод) в усики таракана и в грудную клетку. Схема электростимуляции для киборга представляла собой прямоугольный импульс с амплитудой 1,5 В, частотой 50 Гц, коэффициентом заполнения 50% и шириной 500 мс. Такая конфигурация могла вызвать умеренную и правильную реакцию киборгов и, следовательно, гарантировать хорошую производительность онлайн-контроля.
Были созданы три таракана-киборга. В каждом эксперименте таракана помещали на расстоянии около 1,5 м от главного компьютера. Для каждого испытуемого киборга было проведено десять контрольных онлайн-испытаний. Перед онлайн-контролем каждый таракан сначала прошел 120-секундный тренировочный прогон для оптимизации классификатора SSVEP. Между двумя последовательными испытаниями давали 120-секундный отдых, чтобы свести к минимуму эффекты от усталости как у людей, так и у насекомых. Кроме того, в этом исследовании были проведены эксперименты для контрольных групп. Для системы в экспериментах были спроектированы и испытаны два типа трасс: S-образная трасса и трасса для обхода препятствий.

Результаты экспериментов показали, что средний показатель успешности онлайн-экспериментов, достигнутых с этой системой, составил 20% для S-образной дорожки. При использовании трассы с препятствиями вероятность успешного онлайн-контроля может достигать 40%. Демонстрационное видео успешной навигации по S-образному треку:
Интерфейсы для реабилитации
Облегчение восстановления корковой активности на основе ИМК, связанной с началом походки после разовой многоуровневой хирургии при церебральном параличе.
Во многих случаях развитие вторичных костно-мышечной патологии при ДЦП способствует потере функции, ухудшению походки, усталости, ограничению активности и ограничению жизнедеятельности. Одна из основных методик - многоуровневая ортопедическая хирургия, направленная на исправление всех деформаций и улучшение походки. После этой процедуры часто требуется период до 2 лет, чтобы выйти на уровень функционального плато.
Большинство методов реабилитации после хирургического вмешательства основаны на периферической реорганизации моторного контроля, инициируемой периферической физиотерапией. Однако ЦП поражает в первую очередь структуры мозга. Это говорит о том, что и периферическая нервная система (ПНС), и центральная нервная система (ЦНС) должны быть интегрированы в физиотерапевтическую и когнитивную реабилитационную терапию. Именно такой подход предлагается в этом направлении создания интерфейсов мозг-компьютер.

Предлагается [5] система ИМК, состоящая из двух этапов: первая - как повторное обучение корковой активности, связанной с походкой (см. Рис. 3): была разработана виртуальная среда, в которой было предложено представить, что они начали ходить. Второй - активный контроль реабилитационной терапии на роботизированной платформе. Таким образом, первый месяц после операции, когда пациент обездвижен, является наиболее подходящим периодом для подготовки мозга к новым образцам походки, которые позже будут продвигаться в процессе физической реабилитации с помощью роботов. С таким подходом удаётся снизить период реабилитации до 2 месяцев.

Спасибо за внимание. Подписываемся и всё такое.
https://www.facebook.com/Exomech
https://www.instagram.com/exomech_official
И наш дискорд где можно про все это поговорить и спросить!
Источники
https://link.springer.com/chapter/10.1007/978-3-319-57132-4_2
https://link.springer.com/chapter/10.1007/978-3-319-57132-4_3
https://link.springer.com/chapter/10.1007/978-3-319-57132-4_4
https://link.springer.com/chapter/10.1007/978-3-319-57132-4_6
https://link.springer.com/chapter/10.1007/978-3-319-57132-4_8
Всем привет! Это 3D модель основанная на арте художника Бена Гарриги






Автор - taybevi









