Привет, Пикабу! На связи Лига Боевых Роботов. Сегодня поговорим о боевых роботах в весовой категории «Муравей» (150 грамм.). На роботов в этой категории накладываются ограничения не только по весу, но ещё и по габаритам: робот вместе с активным оружием должен помещаться в куб со стороной 100 мм. Но здесь всё зависит от организаторов соревнований, иногда ограничения по размерам больше, либо отсутствуют вовсе.
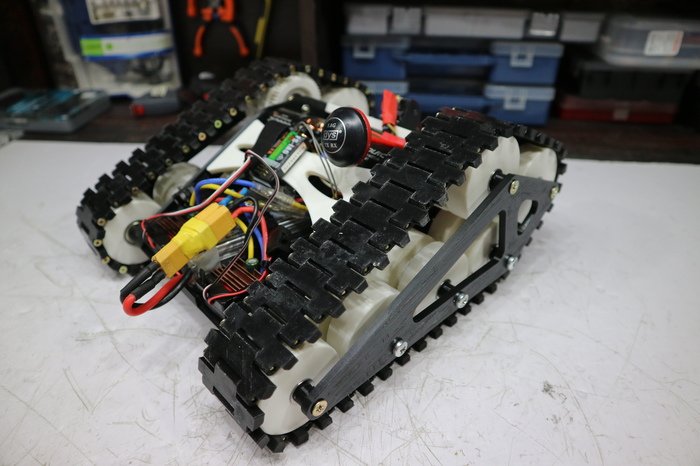
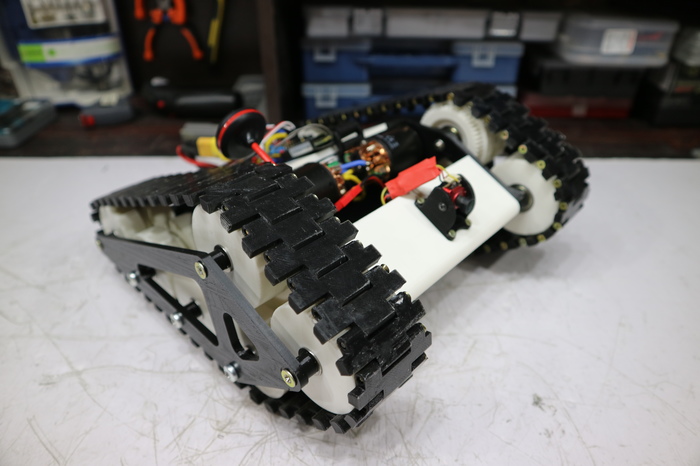
Корпус робота
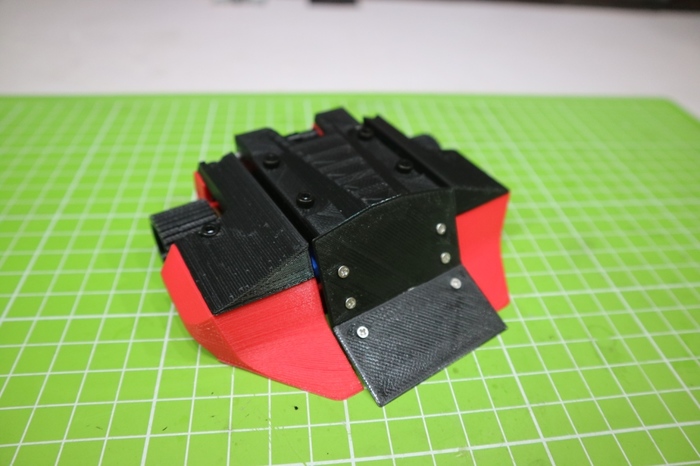
Раньше для изготовления ботов в этой весовой категории часто применялись материалы вроде листового поликарбоната, нейлона, карбона и т.п. Нужен прочный и сравнительно лёгкий материал. Сейчас корпуса для мини ботов зачастую печатаются на 3D принтере. Это позволяет создать цельный и прочный корпус без швов и лишних соединений. Ещё это экономит кучу времени и позволяет напечатать множество запчастей в довольно сжатые сроки.
Используемые комплектующие
Моторы
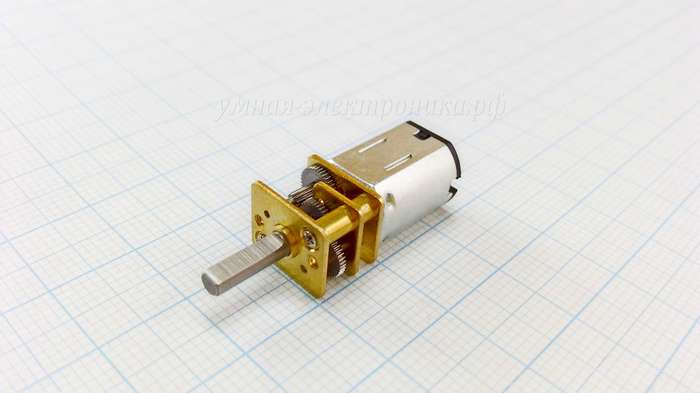
Для привода колёс робота чаще всего используются недорогие миниатюрные коллекторные мотор – редукторы N20 с рабочим напряжением от 6 до 12 вольт.
В продаже встречаются разные мотор – редукторы, отличающиеся по коэффициенту редукции. Чаще всего используются версии от 300 до 600 об\мин. Здесь всё зависит от диаметра колеса и желаемой скорости. Чем больше оборотов в минуту, тем быстрее будет бот. Чем меньше оборотов – тем выше крутящий момент. Здесь нужно находить баланс между скоростью и мощностью. Например, можно установить мотор - редуктор на 1000 об\мин. Робот будет очень быстрым, но в лобовом столкновении вряд ли сможет сдвинуть противника с места. Правда, в таком противостоянии, имеет значение ещё и количество колёс, площадь их пятна контакта с поверхностью, материал и рисунок протектора колёса, а так же расположение центра тяжести.
В своих мини ботах я использовал мотор – редукторы на 12 вольт, 500 об\мин и 2S аккумулятор. Такая сборка показала себя довольно таки не плохо. Роботы получаются достаточно мощными, но не очень быстрыми, благодаря чему ими легко управлять. Если ваш бот будет перемещаться по арене со скоростью пули, то управлять им будет очень не просто. Хотя опытные операторы способны и на такое.
Есть 3 основных версии таких мотор – редукторов, которые встречаются в продаже чаще всего: на 3, 6 и 12 вольт.
Первый вариант обычно не используется вовсе, но, за неимением других вариантов, можно собрать бота и с такими моторами.
Номинальное напряжение 6 вольт. Устанавливать такой мотор довольно таки рискованно. Дело в том, что полностью заряженный 2S аккумулятор выдаёт 8,4 вольта. С таким питанием есть риск просто сжечь двигатель, но зато он будет развивать максимально возможные обороты.
Номинальное напряжение 12 вольт. Это наиболее распространённый вариант мотора. Он без проблем будет работать и от 2S и от 3S аккумулятора. Правда, «двухбаночный» аккумулятор не позволит развить максимальные обороты, потому с таким мотором лучше использовать 3S аккумуляторы.
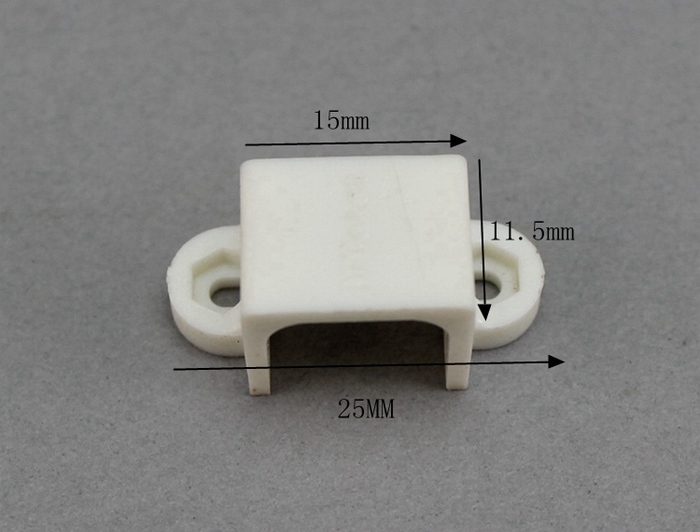
В продаже можно встретить вот такие крепления для этих моторов.
Такое крепление можно напечатать на 3D принтере самостоятельно. Но, чаще всего, моторы фиксируются обычными кабельными стяжками.
Существует ещё одни вариант мотор - редуктора – это переделка миниатюрного сервопривода на постоянное вращение. Но здесь придётся залезть в серву и сделать всё самостоятельно, что может быть не так просто, особенно если у вас нет опыта в подобных делах. К тому же, такой мотор – редуктор – это не самое надёжное решение, особенно если за основу берётся сервопривод SG90 с пластиковыми шестернями. Но есть и плюс – это самое компактное (потому что регулятор оборотов здесь не нужен) и самое бюджетное решение.
Регуляторы оборотов
Для управления двигателем нужен регулятор оборотов. Регуляторы для коллекторных и бесколлекторных двигателей значительно отличаются и НЕ взаимозаменяемы.
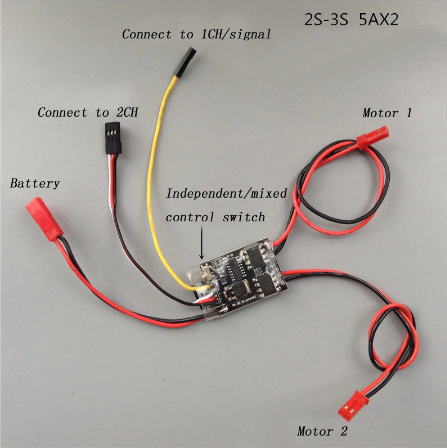
Для управления мотор – редукторами N20 обычно используется вот такой (или другие подобные), двойной регулятор оборотов для коллекторных моторов.
По сути, это два регулятора распаянные на одной плате. Регулятор предназначен для работы с 2-3 баночным аккумулятором (2-3S) т.е. напряжение аккумулятора должно быть не выше 12,6 вольт. Максимальная сила тока – 5 А на каждый мотор.
В своих миниатюрных ботах я использовал вот такие, отдельные регуляторы для каждого мотора.
Здесь рабочее напряжение от 3 до 9,4 вольта, потому я мог использовать только 2S аккумуляторы с напряжением 7,4 вольта (8,4 вольта в полностью заряженном виде). Основная проблема этих регуляторов – размер. Два таких регулятора занимают гораздо больше места, чем один двойной.
Оружие
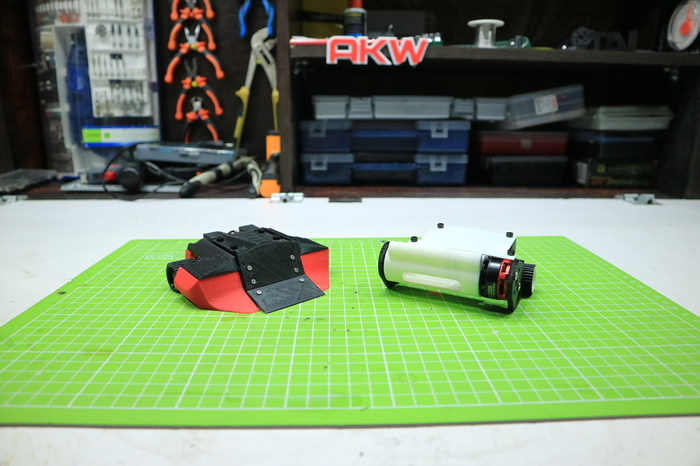
Такие миниатюрные боты, чаще всего, оснащаются одним из двух типов оружия – это флиппер (опрокидыватель) либо спиннер (вертикальный или горизонтальный). Так же допускаются и боты без активного оружия, оснащённые, к примеру, каким – нибудь клином или отвалом.
Для опрокидывателя, чаще всего, используется сервопривод MG90 с металлическим редуктором. Можно попытаться использовать серву SG90 (с пластиковым редуктором) но долго она наверняка не проживёт. В целом можно использовать любой сервопривод, главное, чтобы собранный робот вписался в ограничения по весу и габаритам.
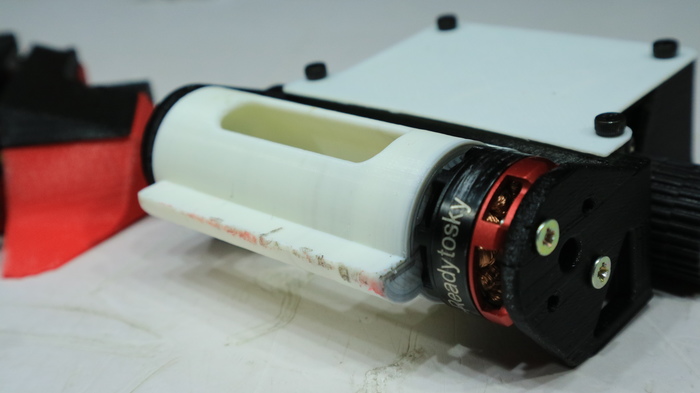
Для привода вращающего оружия зачастую используется бесколлекторный электродвигатель размера 1806. Вот такой, например:
В своём вертикальном спиннере с барабаном я использовал мотор 2205 (который был под рукой на момент сборки), но он слишком тяжёлый, из -за чего бот не вписывается в ограничения по весу.
Для управления БК мотором тоже нужен регулятор оборотов. Рабочее напряжение регулятора должно соответствовать напряжению аккумулятора (от 2S в нашем случае).
Максимальная сила тока, которую может выдержать регулятор, должна быть хотя бы на 15 – 20% выше максимального потребления мотора. Т.е. если мотор потребляет 10 – 15 А, то регулятор нужно ставить хотя бы на 20 А. Во время ударов, когда двигатель оружия раскручивается до нескольких тысяч оборотов в минуту, а затем резко замедляется или вовсе останавливается, регулятор испытывает большие нагрузки, из - за чего может попросту сгореть. Чем больше запас по току, тем дольше проживёт регулятор.
Аккумуляторы
Чаще всего для мини ботов используются Литий - полимерные (Lipo) аккумуляторы. Обычно это двухбаночный аккумулятор (2S) с рабочим напряжением 7,4 вольта и ёмкостью 200-500 mah. Этого вполне достаточно, чтобы даже спиннер с мощным мотором оружия продержался на арене все 3 минуты. Необходимую ёмкость аккумулятора не нужно угадывать, её нужно рассчитать. У нас будет отдельная статья об аккумуляторах, где мы расскажем, как это делается. Хотя, в случае с миниатюрными ботами, это не столь критично.
Так же можно использовать 3S аккумулятор с рабочим напряжение 11,1 вольта, особенно если вы собираетесь устанавливать двигатели на 12 вольт. Но 3S аккумулятор на 200 – 500 mah обойдётся немного дороже, его размеры будут несколько больше, как и его вес. Это нужно учитывать при проектировании робота. Но если все моторы и регуляторы могут питаться от 3S аккумулятора, то, безусловно, стоит использовать именно его.
Учтите, что для Lipo аккумуляторов нужно специальное зарядное устройство. А хранить и заряжать их нужно в специальных огнеупорных боксах или пакетах. Это очень мощные, компактные и лёгкие аккумуляторы. Но они могут вздуться(что очень плохо) или даже загореться из- за перезаряда, или из- за механических повреждений. Об этих аккумуляторах написано немало статей, если вы их никогда не использовали – обязательно ознакомьтесь.
Аппаратура радиоуправления
Чаще всего для управления используется типовая «самолётная» аппаратура радиоуправления, работающая на частоте 2,4 Ггц. Например - Flysky i6. Это недорогая и очень популярная аппаратура.
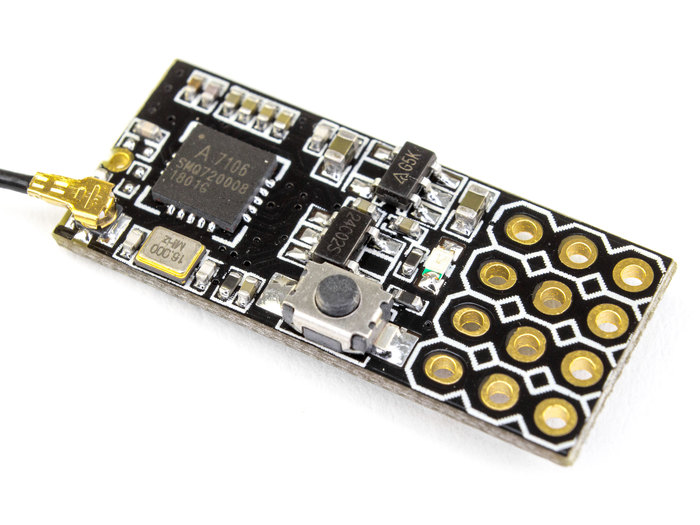
В комплекте с аппаратурой идёт стандартный приёмник и, как правило, он довольно большой. В миниатюрных ботах очень мало места, потому стоит сразу заказать миниатюрную версию приёмника. Для Flysky это может быть приёмник FS2A. Насколько я знаю, это самый маленький приёмник для этой аппаратуры.
При желании можно сразу заказать эту аппаратуру с миниатюрной версией приёмника.
Имеет смысл держать хотя бы один запасной приёмник, даже если вы хотите собрать только одного робота. То же относится к моторам, регуляторам и аккумуляторам. Пусть внешний вид этих пластиковых коробочек не вводит вас в заблуждение. Это - Боевые боты. Их предназначение – разбирать противника на запчасти.
Ссылки на большую часть из вышеописанных комплектующих можно найти на страницах проектов моих миниатюрных ботов - здесь и здесь. Так же подписывайтесь на нашу группу в ВК, чтобы быть в курсе последних новостей.