

HEMI Кастрюля
Ничего сложного, просто вдруг захотелось сделать карбюраторный фильтр.
Ничего сложного, просто вдруг захотелось сделать карбюраторный фильтр.
По мнению архикада18 визуализация проходит уже почти 65533 часа или 2730 дней, ну или 91 месяц... 7,5 лет...
Забажило после пятого часа визуализации.


Всем привет, меня зовут TaHk и по ночам я программирую на c++.
Недавно я столкнулся с задачей (не столько про c++, сколько математической), решение которой показалось мне красивым, и я хочу им поделиться.
Я не занимаюсь профессионально ни математикой, ни программированием (ABAP не считается), поэтому написанное ниже может показаться специалистам довольно банальным и очевидным, но я не исключаю, что кому-то из начинающих разработчиков приведенные в посте решения могут пригодиться.
Итак. Задача -- нарисовать в 3d поверхность, которая задана не набором полигонов, а формулой.
Алгоритм был выбран следующий:
0. Исходные данные.
*Координаты нулевой точки поверхности (точка в глобальной системе координат, являющаяся центром координат для формулы, которой задана поверхность);
*Вектор нормали поверхности в нулевой точке (показывает, как наклонена поверхность относительно глобальных координат);
*Размеры поверхности по x, y и z (чтобы она просчитывалась не по бесконечность во все стороны, а в рамках определенного объема);
*Координаты "глаза";
*Вектор направления взгляда;
*Вектор, показывающий, где у "глаза" верх;
1. Формируем лучи из каждого пикселя экрана и проверяем на пересечение с поверхностью.
2. Если луч не пересекается с поверхностью -- окрашиваем пиксель в черный.
3. Если пересекается -- определяем освещенность точки. Для этого определяем нормаль к поверхности плоскости, и чем меньше угол между нормалью и лучом из камеры -- тем ярче точка.
Давайте разбираться с каждой задачей в отдельности.
1. Лучи из каждого пикселя экрана.
Ну, тут все просто. Чтобы задать луч -- нужна точка и вектор. Точка у нас есть -- это координаты "глаза". И направление взгляда есть. Соответственно, луч для координат [0,0] у нас уже есть. Что же делать с остальными координатами? Ответ на этот вопрос даст (или нет) эта картинка:
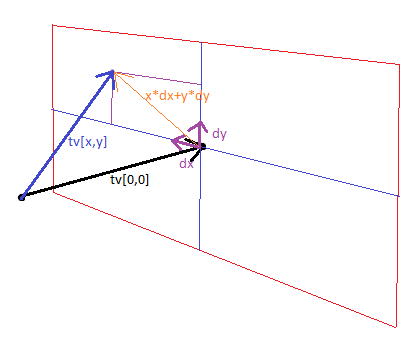
Для начала, нам нужны единичные векторы dx и dy, перпендикулярные друг другу и вектору взгляда, чтобы построить на них плоскую систему координат, которая будет для нас экраном. Вектор dy у нас уже есть («Вектор, показывающий, где у "глаза" верх» в исходных данных). Что же на счет dx? А тут приходит на помощь векторная алгебра, из которой мы помним (или нет), что результатом векторного произведения двух векторов является вектор, перпендикулярный векторам-множителям, с нормой равной площади параллелограмма, построенного на этих векторах. Соответственно, если исходные векторы перпендикулярны друг другу и оба с длиной равной единице – длина результата тоже будет равен единице. А это прекрасно, ведь нам нужен именно единичный вектор.
Таким образом,
dX[0] = tv[1]*dY[2] - tv[2]*dY[1];
dX[1] = tv[2]*dY[0] - tv[0]*dY[2];
dX[2] = tv[0]*dY[1] - tv[1]*dY[0];
где tv — вектор направления взгляда, а dY вектор, показывающий где у взгляда верх.
Дальше, было бы неплохо определиться с длиной векторов dx и dy, определив таким образом размер экрана (по сути, это управление углом обзора). Мне оптимальным показался вариант, когда у экрана размер равен единице
dX[0] /= max_x;
dX[1] /= max_x;
dX[2] /= max_x;
dY[0] /= max_x;
dY[1] /= max_x;
dY[2] /= max_x;
Где max_x – разрешение экрана по x. Да, dy тоже делится на max_x, чтобы длина вектора dx была равна вектору dy, так как иначе изображение будет растянуто по одной из осей.

Итак, у нас есть:
dX, dY – векторы, определяющие плоскость экрана.
dZ – вектор направления взгляда.
for (int y = 0; y <= max_y; ++y) {
for (int x = 0; x <= max_x; ++x) {
tv[0] = dZ[0]+x*dX[0]+y*dY[0];
tv[1] = dZ[1]+x*dX[1]+y*dY[1];
tv[2] = dZ[2]+x*dX[2]+y*dY[2];
// tv – вектор, показывающий направление луча из точки [x,y] экрана
// ...
};
};
В рамках этого цикла мы и будем работать дальше.
2. Пересечение луча с поверхностью.
Обычно лучший способ найти в пространстве точку пересечения луча с поверхностью, которая задана формулой – это решить систему уравнений, состоящую из уравнения плоскости и уравнения луча. Но если в уравнение плоскости проникает тригонометрия – решений становится бесконечное множество (буквально бесконечное, вида x = 0 ± 2πn, где n∈R ), и что делать программно с этой бесконечностью – не ясно. Поэтому мы будем искать точку пересечения итеративно:
1. Определяем параллелепипед, ограничивающий нашу поверхность (мы помним, что по условиям ограничили ее в размерах).
2. Ищем точки пересечения луча и параллелепипеда. Получаем 2 точки – «вход» и «выход» в пределы параллелепипеда.
3. В точке «входа» переводим координаты из глобальной системы координат в локальную для параллелепипеда.
4. В локальных x и у находим по формуле поверхности координату z. Если найденная координата z больше, чем у точки «входа», фиксируем, что мы «под» поверхностью. Иначе – фиксируем, что мы «над» поверхностью.
5. От точки «входа» до «выхода» проверяем аналогичным образом все точки на луче с заданным шагом. Как только на следующем шаге состояние отличается от того, что было на предыдущем – значит, нашли точку пересечения.
6. Если до точки «выхода» состояние не менялось – значит пересечения не было.
Теперь по пунктам.
Существует простой и понятный алгоритм быстрого поиска пересечения прямоугольника с лучом на плоскости. Для его понимания нужно ввести пару терминов:
Точка входа – точка пересечения луча с прямой, в случае если нормаль этой прямой направлена навстречу лучу.
Точка выхода – точка пересечения луча с прямой, в случае если нормаль этой прямой направлена навстречу лучу.
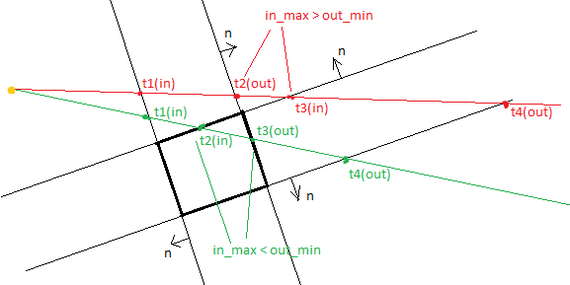
Алгоритм такой:
Проверяем каждую прямую на пересечение с лучом и определяем для каждой точку входа или выхода. Если самая дальняя из найденных точек входа ближе, чем самая ближняя из найденных точек выхода, то это значит, что луч пересекает прямоугольник в этих точках. Если самая дальняя из найденных точек входа дальше, чем самая ближняя из найденных точек выхода, то это значит, что луч не пересекает прямоугольник.
К чему это я? А вот к чему. Этот подход отлично работает и в пространстве, если заменить 4 прямые на 6 плоскостей.
Как мы помним, поверхность задана точкой и нормалью и ограничена в размерах по x, y и z. Причем эти x y и z – в локальных координатах. То есть наш параллелепипед, ограничивающий поверхность, должен уметь вращаться вместе с поверхностью.
Поэтому для начала определим эти плоскости с учетом поворота параллелепипеда с поверхностью. Для этого нам понадобятся 3 вектора:
ddX[3] = {0,0,0}; // единичный вектор, который направлен вдоль оси X нашей поверхности
ddY[3] = {0,0,0}; // единичный вектор, который направлен вдоль оси Y нашей поверхности
ddZ[3] = {0,0,0}; // единичный вектор, который направлен вдоль оси Z нашей поверхности
с ddZ все понятно – это нормаль к поверхности.
С ddX и ddY сложнее. Одной только точкой и нормалью можно задать в пространстве только бесконечную поверхность. А тут нам нужно зафиксировать поворот этой плоскости вокруг оси z. Это можно сделать разными способами – я беру еще одну точку на плоскости и фиксирую ее координаты в глобальной системе координат. Допустим, это точка point2, а нулевая точка поверхности — point. Тогда
ddX[0] = point2[0] - point[0];
ddX[1] = point2[1] - point[1];
ddX[2] = point2[2] - point[2];
len = sqrt(ddX[0]*ddX[0]+ddX[1]*ddX[1]+ddX[2] *ddX[2]) ;
ddX[0]/=len;
ddX[1]/=len;
ddX[2]/=len;
Как мы видим, я не забыл, что нам нужен именно единичный вектор (с длиной равной единице), поэтому я посчитал длину вектора от точки point к точке point2 и разделил каждую координату на длину. Эта процедура называется нормализация вектора – приведение его к единичной длине с сохранением направления.
Ну и ddY по старой схеме (как в пункте 1, где мы экран рисовали) определяем как векторное произведение ddX на ddZ:
ddY[0] = ddX[1]*ddZ[2] - ddX[2]*ddZ[1];
ddY[1] = ddX[2]*ddZ[0] - ddX[0]*ddZ[2];
ddY[2] = ddX[0]*ddZ[1] - ddX[1]*ddZ[0];
Таким образом, мы можем задать все 6 плоскостей. Например, плоскость, ограничивающая параллелепипед «снизу» определяется так:
spoint[0] = point[0] - z * ddZ[0];
spoint[1] = point[1] - z * ddZ[1];
spoint[2] = point[2] - z * ddZ[2];
n[0] = -ddZ[0];
n[1] = -ddZ[1];
n[2] = -ddZ[2];
где point — нулевая точка нашей поверхности, а z - половина высоты параллелепипеда.
Остальные – по аналогии, меняем только - на + и буквы координат.
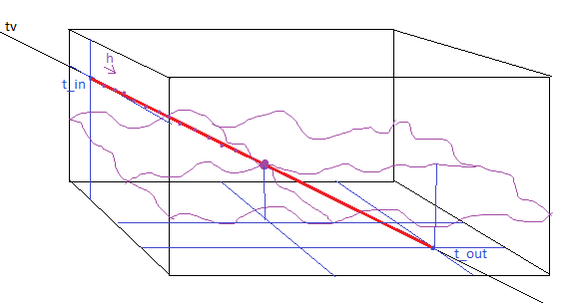
Дальше нужно в общем виде понимать, как мы будем искать точки пересечения луча и плоскости. Допустим, плоскость задана точкой point[3] и нормалью n[3]. Луч задан точкой tp[3] и вектором tv[3]. Еще одна картинка в стиле «я у мамы paint master»:
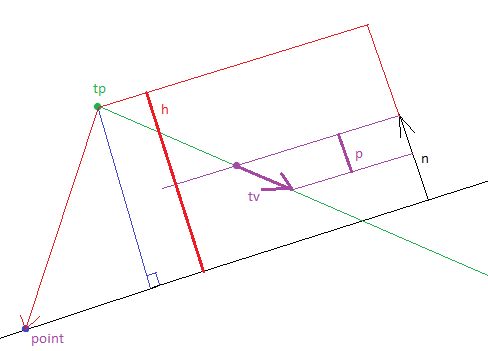
Несложно догадаться, что если векторы n и tv имеют единичную длину, то расстояние от точки tp до точки пересечения с плоскостью будет равно -h/p. Шучу, сложно догадаться. Но при желании вы можете это проверить. Даже так – если вы сейчас в школе проходите векторную алгебру – вы должны это проверить и выложить в комментариях доказательство. Иначе вам поставят двойку. Или что там сейчас ставят в школах…
Как же найти эти h и p? Тут на помощь снова приходят определения из векторной алгебры. Скалярное произведение векторов численно равно длине проекции одного из этих векторов на другой. Как определить скалярное произведение? А примерно так:
float MulVecSc(float *Vec1, float *Vec2){
return Vec1[0]*Vec2[0] + Vec1[1]*Vec2[1] + Vec1[2]*Vec2[2];
};
Как мы видим из рисунка, h – это проекция на нормаль вектора от точки tp до точки point, принадлежащей плоскости, а p – это проекция на нормаль вектора tv.
vp[0] = point[0] - tp[0];
vp[1] = point[1] - tp[1];
vp[2] = point[2] - tp[2];
p = MulVecSc(n,tv);
h = MulVecSc(n,vp);
t = - h/p;
Знак p покажет нам, с какой стороны плоскости мы находимся (а значит покажет, нашли мы точку «входа» или «выхода»).
Резюмируем. В пространстве точки пересечения луча с параллелепипедом находятся так:
float ddY[3] = {point2[0],point2[1],point2[2]};
float ddX[3] = {0,0,0};
float ddZ[3] = {n[0],n[1],n[2]};
tmMulVec(n,ddY,ddX);
// 6 плоскостей. Ищем самый поздний "вход" и самый ранний "выход"
// Плоскость 1
spoint[0] = point[0] + x * ddX[0];
spoint[1] = point[1] + x * ddX[1];
spoint[2] = point[2] + x * ddX[2];
vp[0] = tp[0]-spoint[0];
vp[1] = tp[1]-spoint[1];
vp[2] = tp[2]-spoint[2];
n[0] = ddX[0];
n[1] = ddX[1];
n[2] = ddX[2];
p = tmMulVecSc(lv_n,tv);
t = - tmMulVecSc(lv_n,lv_vp)/p;
if(p>0.0f){ // выход
if(t<t_out)
t_out = t;
}else{ // вход
if(t>t_in)
t_in = t;
};
// Плоскость 2
spoint[0] = point[0] - x * ddX[0];
spoint[1] = point[1] - x * ddX[1];
spoint[2] = point[2] - x * ddX[2];
vp[0] = tp[0]-spoint[0];
vp[1] = tp[1]-spoint[1];
vp[2] = tp[2]-spoint[2];
n[0] = -ddX[0];
n[1] = -ddX[1];
n[2] = -ddX[2];
p = tmMulVecSc(lv_n,tv);
t = - tmMulVecSc(lv_n,lv_vp)/p;
if(p>0.0f){ // выход
if(t<t_out)
t_out = t;
}else{ // вход
if(t>t_in)
t_in = t;
};
// Плоскость 3
// ...
// Плоскость 4
// …
// Плоскость 5
// …
// Плоскость 6
// ...
if(t_in<t_out&&t_out>0){
// есть пересечение
};
Так. Теперь мы знаем, что в промежутке от t_in до t_out мы внутри параллелепипеда.
Дальше, как и планировали, будем проверять каждую точку с неким шагом h на то, находится она выше или ниже поверхности в локальных координатах.
Что такое локальные координаты?
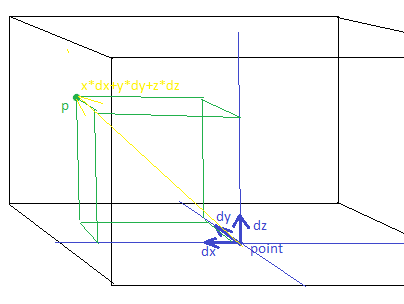
Это система координат, образованная теми самыми ddX, ddY, ddZ которые мы определили выше. Как очевидно из рисунка (на этот раз действительно очевидно), если у нас есть точка p, то вектор, ведущий от нулевой точки нашей поверхности до точки p будет определяться векторной суммой x*ddX+y*ddY+z*ddZ, где x y и z локальные координаты этой точки. Что ж, в таком случае, зная глобальные координаты точки p мы можем получить локальные таким образом:
vtp[0] = p[0]-point[0];
vtp[1] = p[1]-point[1];
vtp[2] = p[2]-point[2];
x = MulVecSc(ddX,vtp);
y = MulVecSc(ddY,vtp);
z = MulVecSc(ddZ,vtp);
Дальше, проверяем, находимся мы в этой точке под поверхностью или над.
F = F_xy; // тут у нас определение значения функции, описывающей плоскость. Его мы рассмотрим позже, в 3й части.
if(z<F){ // определяем, находимся мы в точке входа «над» или «под» поверхностью
in = true;
}else{
in = false;
};
Дальше – просто делаем это в цикле, перемещая точку p:
for(t = t_in+h;t<=t_out;t+=h){
pt[0] = tp[0] + tv[0]*t;
pt[1] = tp[1] + tv[1]*t;
pt[2] = tp[2] + tv[2]*t;
vtp[0] = point[0]-pt[0];
vtp[1] = point[1]-pt[1];
vtp[2] = point[2]-pt[2];
x = -tmMulVecSc(ddX,vtp);
y = -tmMulVecSc(ddY,vtp);
z = -tmMulVecSc(ddZ,vtp);
F = F_xy;
if(z<F){ // сейчас внутри
if(!in){ // были снаружи
break;
};// были снаружи
}else{ // сейчас снаружи
if(in){ //были внутри
break;
};//были внутри
}; // внутри/снаружи
}; // for t_in ... t_out
if(t>=t_out){
break; // никакого пересечения не было
};
// на данный момент t – это расстояние от точки tp до точки пересечения
// фактически точка на расстоянии t уже после пересечения с плоскостью, поэтому
// в качестве точки пересечения берем t-h
t-=h
collision_pt[0] = tp[0] + tv[0]*t;
collision_pt[1] = tp[1] + tv[1]*t;
collision_pt[2] = tp[2] + tv[2]*t;
Вот мы и нашли, где луч пересек поверхность. Запихнув это решение в цикл, который мы получили в первой части, мы получим картинку, на которой будут видны очертания поверхности. Но на 3d картинку это не будет похоже – чтобы одна точка поверхности отличалась от другой (что создаст объем) нужно определить освещенность.
3. Определение освещенности точки.
В рамках этой задачи мы не будем заморачиваться с источниками света – будем считать, что у нас один источник и он расположен непосредственно за «глазом». В таком случае расчет освещенности сводится к простому определению нормали к поверхности. Чем меньше значение проекции – тем темнее точка, так как свет падает под большим углом. Поскольку векторы у нас единичные, значение проекции будет изменяться в диапазоне [0..1], что позволяет просто домножать значение цвета на проекцию и получать нужную картинку.
Итак, вернемся к «простому определению нормали».
Пора наконец определиться с тем, какую поверхность мы рисуем. В коде ранее была конструкция F = F_x; Тут F_x это макрос, в который я подставляю формулу, которую хочу рисовать. Разумеется, в последствии в код можно будет подставить любую формулу, но для примера нужно взять что-то конкретное. Я выбрал такое:
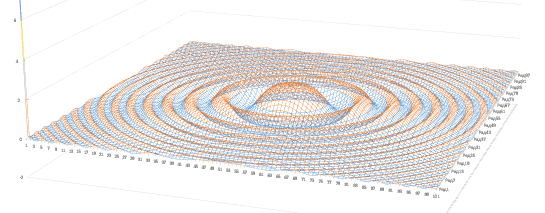
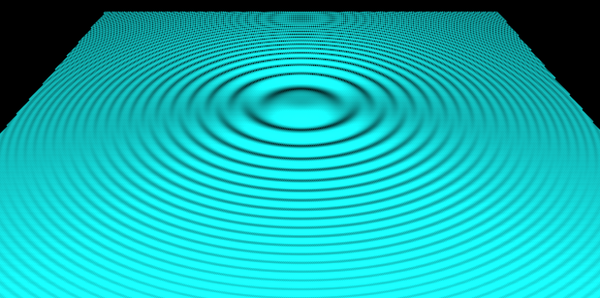
#define F_xy cos((x*x+y*y)/20.0)/(1+(x*x+y*y)/100.0)
Чтобы понимать, что мы хотим увидеть в программе, построим этот график в каком-нибудь инструменте, который это уже умеет:
Так как же определить нормаль в какой-нибудь точке поверхности? Нормаль – это вектор перпендикулярный касательной плоскости к поверхности в заданной точке, правильно? А коэффициент угла наклона касательной к графику функции в точке – это ни что иное как производная функции в этой точке. Таким образом, нужно просто взять с обратным знаком производные исходной функции по трем координатам – это и будет вектор нормали.
Для примера возьмем двумерный график:
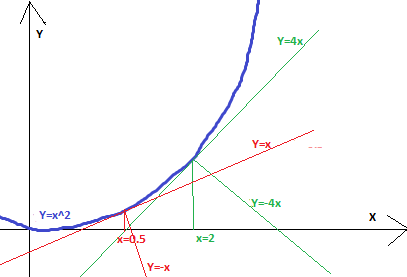
(графики касательных смещены для наглядности)
Функция Y=x^2. Её производная Y'=2x. Соответственно, в точке X=0.5 коэффициент угла наклона равен единице, а в точке 2 – четырем. Из графика видно, что коэффициент угла наклона с обратным знаком показывает угол наклона линии, перпендикулярной касательной. Эта же логика работает и для более сложных графиков. Так же она работает и в пространстве.
Поэтому запишем уравнение поверхности в виде cos((x*x+y*y)/20.0)/(1+(x*x+y*y)/100.0) - z = 0 и возьмем производные по трем координатам:
F'x = ((sin((x*x+y*y)/20.0)*x/10.0)*(1+(x*x+y*y)/100.0)-(x/50.0)*cos((x*x+y*y)/20.0))/((1+(x*x+y*y)/100.0)*(1+(x*x+y*y)/100.0))
F'y = ((sin((x*x+y*y)/20.0)*y/10.0)*(1+(x*x+y*y)/100.0)-(y/50.0)*cos((x*x+y*y)/20.0))/((1+(x*x+y*y)/100.0)*(1+(x*x+y*y)/100.0))
F'z = -1
Вернемся к коду. Теперь зная точку пересечения и ее локальные координаты – мы можем найти нормаль. Она будет определяться как N[3] = {-F'x,-F'y,-F'z}. Но нужно помнить, что это ее значения в локальных координатах. Чтобы перевести в глобальные – нужно каждый компонент умножить на значение вектора той оси, которой он соответствует:
#define F_x ((sin((x*x+y*y)/20.0)*x/10.0)*(1+(x*x+y*y)/100.0)-(x/50.0)*cos((x*x+y*y)/20.0))/((1+(x*x+y*y)/100.0)*(1+(x*x+y*y)/100.0))
#define F_y ((sin((x*x+y*y)/20.0)*y/10.0)*(1+(x*x+y*y)/100.0)-(y/50.0)*cos((x*x+y*y)/20.0))/((1+(x*x+y*y)/100.0)*(1+(x*x+y*y)/100.0))
#define F_z 1.0
float Fx = F_x;
float Fy = F_y;
float Fz = F_z;
collision_normal[0] = ddX[0]*Fx+ddY[0]*Fy+ddZ[0]*Fz;
collision_normal[1] = ddX[1]*Fx+ddY[1]*Fy+ddZ[1]*Fz;
collision_normal[2] = ddX[2]*Fx+ddY[2]*Fy+ddZ[2]*Fz;
Теперь мы готовы определять компоненты цвета в заданной точке. Допустим, базовый цвет поверхности у нас лежит в переменной rgb:
Shade = 255.0f * MulVecSc(collision_normal,tv);
if(Shade < 0)
Shade = -Shade;
r = Shade * rgb[0];
g = Shade * rgb[1];
b = Shade * rgb[2];
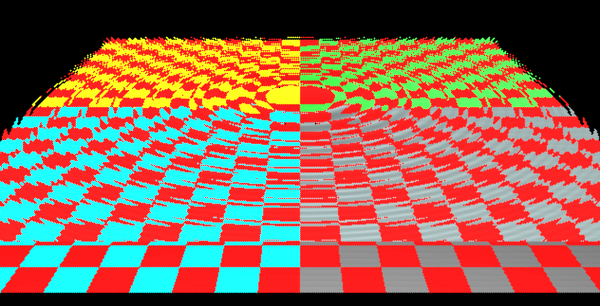
Оценим результат:
Сменим формулы:
#define F_xy 0.3*(sin(x)*cos(y/2.0)+cos(x/2.5)*sin(y/1.5))
#define F_x -0.3*(cos(x)*cos(y/2.0)-sin(x/2.5)*sin(y/1.5))
#define F_y -0.3*(-sin(x)*sin(y/2.0)+cos(x/2.5)*cos(y/1.5))
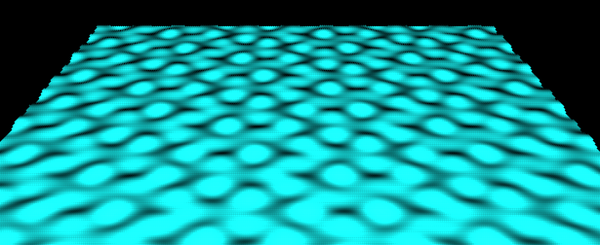
Ок.

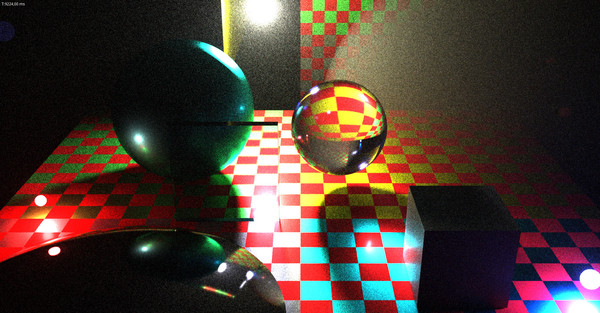
Если кого-нибудь заинтересовало – подписывайтесь. Если будет достаточно желающих – освещу другие моменты и задачи, с которыми я столкнулся в ходе разработки: преломление, рассеивание света. Картинка для затравки (на ней чуть менее чем всё, что сейчас умеет программка, в ходе реализации которой я столкнулся с описанной выше задачей):
Гуглил на эту тему, но очень много инфы и всё как-то расплывчато, да пока и некогда было заниматься этим вопросом. Есть кто на Pikabu, кто занимается этим и знает по части визуализации? В целом кадры получаются красивые, но на А1, А2 уходит от 10 до 20 часов.
Что нужно расширять в системнике, чтобы ускорять визуализацию? CPU? Видео, как пишут, особо не влияет, пойдёт и слабая карточка, ОЗУ достаточно от 4гб и ssd-шник...
Ещё слышал, что существуют рендер-фермы, но чего-то я не смог найти сервиса для cinerender by maxon.
Вчера забежал домой и сфоткал таймер, который глюканул. По версии таймера визуализация идёт более... 45 тысяч часов?


Исходная 3D-модель была выполнена в программе ArchiCAD 19, и провизуализирована с помощью встроенного Cinerender by MAXON
Процесс создания этой обработки в виде анимации разобранный по слоям и другие мои работы можете увидеть в группе: https://vk.com/rotate_art
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi