Всем привет!
Не знаю, пойдет ли тут тема поделок на Ардуино, но попробую :)
Небольшая предыстория: Есть у меня задумка сделать покадровый сканер 8мм (8 и super8) кинопленок, на основе экшн камеры MOBIUS, которую потом планирую заменить на наромальный сенсор. И одна из важных частей сего сканера - лентопротяг, способный достаточно точно перемещать пленку по команде с PC.
Первоначальные прикидки показали, что должно хватить обычного мелкого шаговика с разрешением, 1.8 градуса на шаг.
Собственно эту обвязку между PC и шаговым двигателем я и покажу.
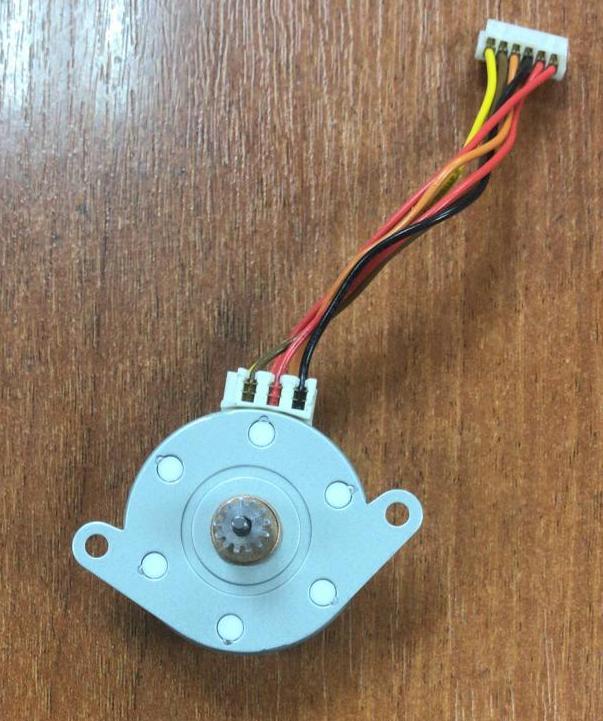
Первое что нам нужно - это собственно двигатель. В последний визит на барахолку за 200р был куплен самый мелкий шаговик с 6 выводами, по факту оказавшийся Moons 14HY5001.
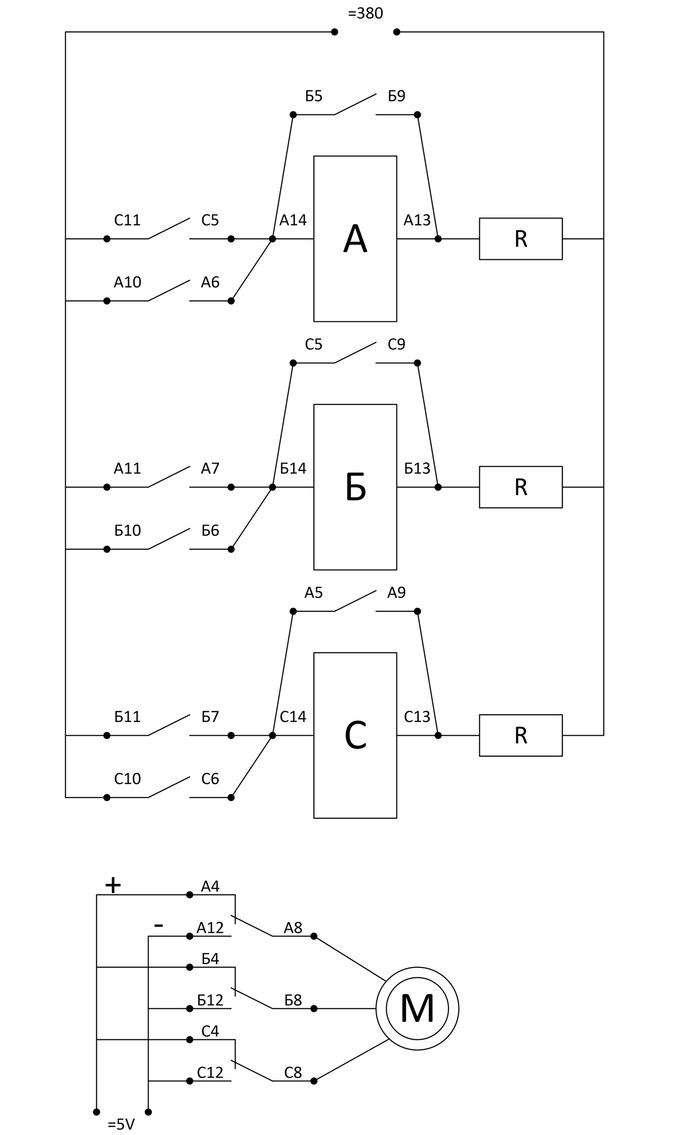
Даташита на именно этот двигатель не нашлось, но нам это и не очень важно. По количеству выводов можно сделать вывод, что шаговик униполярный. В большинстве случаев выводы таких двигателей сделаны по схеме A1-C-A2-B1-C-B2, где A и B - выводы обмоток, а C - общий.
Не вдаваясь в теорию, мне нужны только концы обмоток. Для того что бы их найти можно воспользоваться простым способом. Последовательно закорачиваем выводы и крутим вал пальцами. Если появляется сопротивление вращению - обмотка найдена. В моем случае схема оказалась стандартной.
Теперь заглядываем в запасы запчастей:
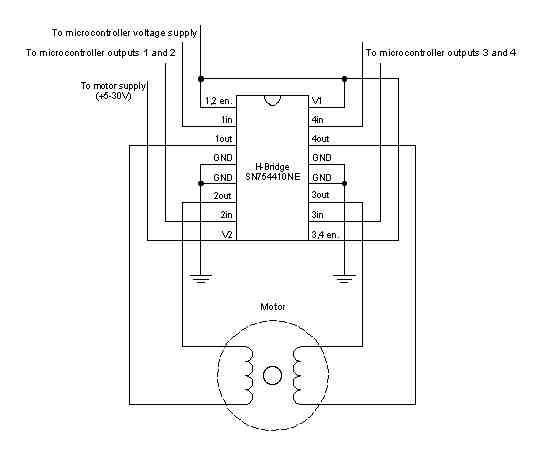
и ищем там драйвер для шаговика и подходящую платку Ардуино на 5В. У меня оказалась пачка банальных L239D в DIP корпусах (вон они, снизу слева :) Для тестового стенда более чем достаточно. Ардуино ПроМини на 5 вольт валялась на столе :)
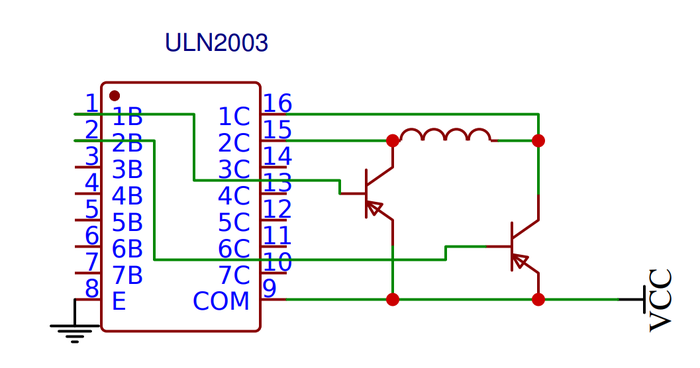
Теперь схема подключения 239
Здесь всё элементарно, 4 вывода на мотор, 4 входа с нашей Ардуино, плюс питание. Достаем паяльник, вешаем "сопли".
В первой итерации тестовый стенд выглядел так:
Теперь нужен скетч для Ардуино. Шьем первое что попалось в интернете, подкорректировав значения пинов для управления двигателем
Шьем, тестируем:
Ура! Хоттабыча не запустили и поделка заработала :)
Теперь время облагородить все это и поменять Ардуино. Дело в том, что мне нужно отправлять команды на Ардуино с PC. У ПроМини нет встроенного usb, поэтому для взаимодействия нужен дополнительный конвертер usb-2-serial. Зато в запасах есть Ардуино Nano у которого уже есть usb.
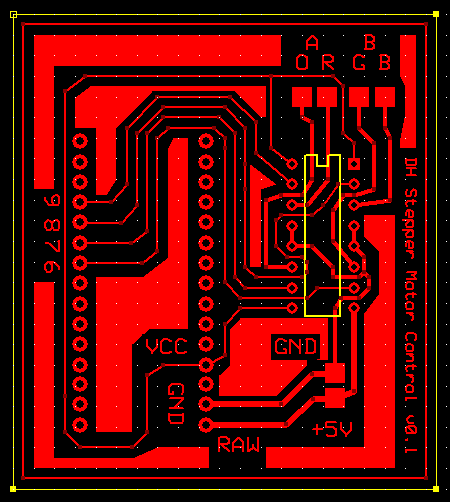
Поэтому открываем PCBExpress (бесплатный кстати) и разводим платку под Nano.
Естественно я чуть-чуть накосячил, в обозначении выводов для мотора, но на работоспособность это не влияет.
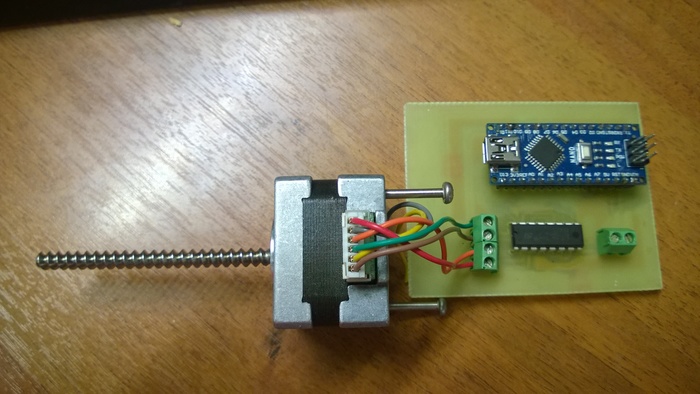
При помощи принтера, утюга и лимонной кислоты изготавливаем платку
Распаиваем компоненты и разъемы. Подключаем двигатель, заливаем скетч. Тестируем что все завелось.
Тут тоже обошлось без дыма, поэтому считаем задачу подключения решенной.
Остается только переписать скетч под управление с PC через компорт. Ну и можно написать простенькую морду с кнопками для управления.
Финальный скетч в комментариях
PS: На истину не претендую, создание девайса в общей сложности заняло 1.5 часа времени из которых большую часть заняло рисование и травление/сверловка платки.