
Любой бы приуныл((((
Показать полностью
1
Добрый день, дорогие пикабушники. В университете дали задание подключить к плате arduino гироскоп gy-86, считать с него данные, а затем использовать эти данные в Processing. Задачу я более менее выполнил, но потом последовала задача модернизировать схему, включив туда дополнительный гироскоп gy-521, и уже считывать данные с двух гироскопов для для двух разных объектов в Processing.
Ниже приведён скрин на котором демонстрируется работа процессинга.

данные считываются с первого гироскопа, а затем процессинг отрисовывает положение гироскопа в пространстве.
Теперь ближе к сути проблемы. Мне был выдан очень интересный экземпляр ардуино именуемый "НАНО" ниже фото
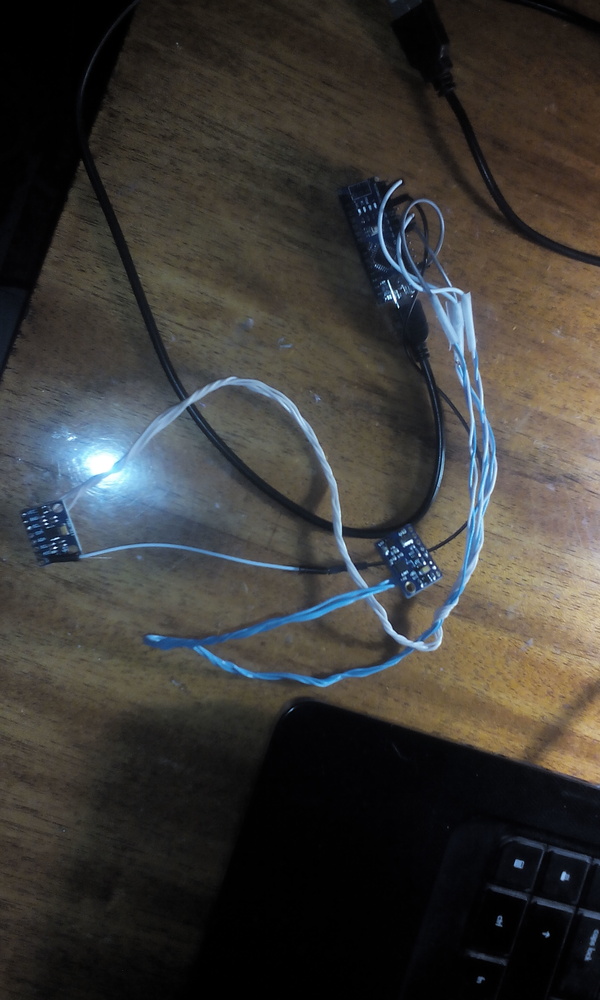

В общем 2 датчика положения в пространстве, прикручены к одним контактам, и по заданию преподавателя, одновременно нужно получать данные с двух гироскопов, и в процессинге 2 разных объекта должны отображать положения в пространстве. Много убил времени, но так и не смог распаралелить 2 гироскопа между собой, либо один гироскоп данные посылает, либо лругой, либо 2 одновременно на один объёкт перебивая друг друга. Ищу помощи знающих. ниже прилагаю код для ардуино и для процессинга.
Скетч ардуино:
// MPU-6050 Short Example Sketch
// By Arduino User JohnChi
// August 17, 2014
// Public Domain
//Modified by Pravat Kumar
#include<Wire.h>
#include "I2Cdev.h"
#include "MPU6050.h"
const int MPU=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
float r,b;
long t=0;
long tdiff;
float dt,anv,angle=0,an;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
t=millis();
}
void loop()
{
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
b=float(AcY)/sqrt((double(AcZ)*double(AcZ))+(double(AcX)*double(AcX)));;
r=(atan(b)*180)/3.1416; //radian to degree
tdiff=millis()-t; //getting time difference in milli sec
dt=float(tdiff)/1000; //converting to seconds
anv=(float(GyX)+200)/131; //getting instantaneous angular velocity
//200 was the gyroscope offset value for me
//131 is the LBS sensitivity(Check data sheet)
angle=angle+(anv*dt); //integrating to find angle from gyroscope
//Complementary filter
//Combines Gyroscope & Accelerometer data
an=((0.8)*(an+(anv*dt)))+(r*0.20);
/*
* Now that all data are ready its time to send them
* Three readings are sent each time & to distinguish one data from other
* i am sending stop bytes (like '*', '@', '.').
*/
Serial.print(int(r));
Serial.print("*");
Serial.print(int(angle));
Serial.print("@");
Serial.print(int(an));
Serial.print(".");
t=millis();
delay(100);
}
Скетч для процессинга:
import processing.serial.*;
Serial port;
String data="", acc="", gyro="", fusion="";
int index=0, index2=0;
int rec1x=25,rec1y=80;
int rec2x=rec1x+275,rec2y=rec1y;
int rec3x=rec2x+275,rec3y=rec1y;
float x1,y1,x2,y2,cx,cy,a,b;
float ang1=0,ang2=0,ang3=0,angle1,angle2,angle3;
float inc1=1,inc2=1.2;
PFont font1,font2,font3,font4;
void setup()
{
size(1000,400);
smooth();
port=new Serial(this, "COM16", 9600);
port.bufferUntil('.');
//font1=loadFont("CopperplateGothic-Bold-50.vlw");
//font2=loadFont("Bauhaus93-80.vlw");
//font3=loadFont("ARBONNIE-100.vlw");
}
void draw()
{
background(50);
//textFont(font2,60);
fill(40,200,255);
text("mpu-6050",360,50);
//textFont(font2,24);
fill(0,150,255);
text("by pvt",640,50);
fill(1,255,1);
noStroke();
rect(880,80,100,40,10,10,10,10);
fill(255,1,1);
noStroke();
rect(880,140,100,40,10,10,10,10);
ang1=float(acc);
ang2=float(gyro);
ang3=float(fusion);
//accelerometer
noStroke();
fill(50,10,250);
rect(rec1x,rec1y,250,20);
// textFont(font1,22);
fill(255);
text("accelerometer",50,98);
noStroke();
fill(50,20,200,80);
rect(rec1x,rec1y+20,250,250);
noStroke();
fill(0);
ellipse(rec1x+(250/2),rec1y+20+(250/2),240,240);
//acc_line
cx=rec1x+(250/2);
cy=rec1y+20+(250/2);
angle1=radians(ang1);
a=120*cos(angle1);
b=120*sin(angle1);
x1=cx-a;
y1=cy-b;
x2=cx+a;
y2=cy+b;
stroke(255,0,0);
strokeWeight(2);
line(x1,y1,x2,y2);
fill(0);
noStroke();
ellipse(cx,cy,80,80);
// textFont(font3,70);
fill(40,200,255);
text(abs(int(ang1)),cx-30,cy+22);
//gyroscope
noStroke();
fill(50,10,250);
rect(rec2x,rec2y,250,20);
//textFont(font1,22);
fill(255);
text("gyroscope",350,98);
noStroke();
fill(50,20,200,80);
rect(rec2x,rec2y+20,250,250);
fill(0);
ellipse(rec2x+(250/2),rec2y+20+(250/2),240,240);
//gyro_line
cx=rec2x+(250/2);
cy=rec2y+20+(250/2);
angle2=radians(ang2);
a=120*cos(angle2);
b=120*sin(angle2);
x1=cx-a;
y1=cy-b;
x2=cx+a;
y2=cy+b;
stroke(2,2,255);
strokeWeight(2);
line(x1,y1,x2,y2);
fill(0);
noStroke();
ellipse(cx,cy,80,80);
//textFont(font3,70);
fill(40,200,255);
text(abs(int(ang2)),cx-30,cy+22);
//fusion
noStroke();
fill(50,10,250);
rect(rec3x,rec3y,250,20);
//textFont(font1,22);
fill(255);
text("fusion",660,98);
noStroke();
fill(50,20,200,80);
rect(rec3x,rec3y+20,250,250);
fill(0);
ellipse(rec3x+(250/2),rec3y+20+(250/2),240,240);
//fusion_line
cx=rec3x+(250/2);
cy=rec3y+20+(250/2);
angle3=radians(ang3);
a=120*cos(angle3);
b=120*sin(angle3);
x1=cx-a;
y1=cy-b;
x2=cx+a;
y2=cy+b;
stroke(0,255,0);
strokeWeight(2);
line(x1,y1,x2,y2);
fill(0);
noStroke();
ellipse(cx,cy,80,80);
// textFont(font3,70);
fill(40,200,255);
text(abs(int(ang3)),cx-30,cy+22);
//animation
if (mousePressed==true)
{
if (get(mouseX,mouseY)==color(1,255,1))
{
fill(50);
stroke(1,255,1);
strokeWeight(5);
rect(880,80,100,40,10,10,10,10);
ang1=ang1+inc1;
ang2=ang2+inc2;
ang3=(0.8*ang1)+(0.2*ang2);
if (ang1>90 || ang1<-90)
{
inc1=-inc1;
}
if (ang2>90 || ang2<-90)
{
inc2=-inc2;
}
}
}
//shuting animation down; no click required
if (get(mouseX,mouseY)==color(255,1,1))
{
fill(0,100,200);
stroke(255,1,1);
strokeWeight(5);
rect(880,140,100,40,10,10,10,10);
if (ang1>0)
{
ang1--;
}
if (ang2>0)
{
ang2--;
}
if (ang1<0)
{
ang1++;
}
if (ang2<0)
{
ang2++;
}
ang3=(0.9*ang1)+(0.1*ang2);
}
}
void serialEvent(Serial port)
{
data= port.readStringUntil('.');
data=data.substring(0,data.length()-1);
index= data.indexOf("*");
index2=data.indexOf("@");
acc= data.substring(0,index);
gyro= data.substring(index+1,index2);
fusion=data.substring(index2+1,data.length());
}


