Секреты робота Атлас
Наверное пасхалку спрятали, но не разглядеть(
Ссылка на видео https://youtube.com/shorts/v4vGGHeYtbg?feature=shares
Показать полностью
1
1
Наверное пасхалку спрятали, но не разглядеть(
Ссылка на видео https://youtube.com/shorts/v4vGGHeYtbg?feature=shares
Большей частью в выпендрёже и на этот раз в режиме подай-принеси на стройке, но прогресс данной платформы "Атлас" просто потрясающий.
В видео "из-за кулис" также много интересных технических моментов рассказывается. Да и робот спокойно бегущий с тяжёлой штангой в руках довольно внушает...
Свободный перевод интервью с Пэтом Мэрионом, ведущим разработчиком программного обеспечения для сенсорных систем Атласа.
Разработчики Атласа используют паркур для быстрого создания поведения, динамического движения, и связи между восприятием и системами управления, что позволяет роботу в буквальном смысле адаптироваться на лету.
Алгоритмы восприятия робота преобразуют данные сесноров в формат, пригодный для принятия решений и планирования физических действий. Атлас использует инерционные сенсоры, сенсоры положения моторов, сенсоры силы для управления движением и удержания равновесия тела.
Атлас использует time-of-flight камеру с сенсором расстояния для создания облака точек с частотой 15 кадров в секунду. Облако точек (point cloud) - это большая коллекция измеренных растояний. С помощью алгоритма многоплоскостной сегментации Атлас извлекат из облака точек отдельные поверхности, из которых в свою очередь строятся модели окружающих объектов.
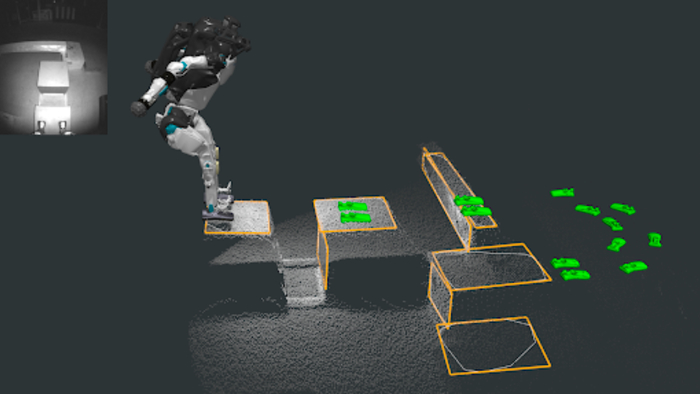
Слева вверху на рисунке показано, что видит инфракрасная камера робота. Оранжевыми прямоугольниками обозначены поверхности, которые Атлас смог распознать. Эти поверхности используются для планирования будущих действий, и зеленым цветом показано, куда робот планирует ставить ступни ног.
Робот получает высокоуровневую карту, показывающую, куда он должен двигаться и какие трюки он должен исполнить по пути. Эта карта является приблизительной, она не соответствует в точности построенной дорожке с препятствиями. Атлас использует эту карту для бега, при этом заполняя пробелы данными сенсоров. например, Атлас знает, что должен запрыгнуть на коробку. Если подвинуть коробку на полметра в сторону, Атлас все равно найдет и запрыгнет на нее. Если отодвинуть коробку слишком далеко, система не сможет ее найти и робот остановится.
Каждое движение, которое производит Атлас, получено из библиотеки шаблонов, подготовленных заранее с помощью оптимизации траекторий. Благодаря этому мы можем обучать робота новым движениям, добавляя новые траектории в библиотеку. Получая от системы восприятия запланированную цель для движения, робот выбирает из библиотеки шаблон, наиболее близкий к требуемому движению.
Разработка элементов поведения позволяет инженерам Boston Dynamics испытать пределы возможностей робота в симуляции, а также уменьшает количество вычислений, которые должен выполнять робот во время движения.
Для непосредственного выполнения движений робот использует так называемое управление с прогнозирующими моделями (model predictive control, MPC), т.е. модель динамики робота используется для предсказания того, как движения робота будут развиваться со временем. Контроллер постоянно решает задачу оптимизации для нахождения оптимального движения.
Шаблоны, сохраненные в библиотеке, являются примерами "хороших" решений. Контроллер адаптирует силы, положения частей тела, время исполнения движений, чтобы учесть факторы окружения: разницу в геометрии, проскальзывания конечностей и другие факторы, возникающие во время движения. Прыжок с платформы высотой 52 см принципиально не отличается от прыжка с платформы высотой 40 см, и MPC контроллер робота успешно решает подобные задачи.
Поскольку контроллер прогнозирует будущее, он может создавать плавные переходы от одного движения к другому. Это также облегчает создание библиотеки движений, поскольку инженерам не приходится рассматривать комбинации различных движений, которые могут следовать друг за другом. Разумеется, MPC контроллер не всесилен, и нам приходится искать компромис между сложностью контроллера и размером библиотеки шаблонов траекторий.
Работа над паркуром позволила получить глубокое понимание того, как можно создавать и управлять широким спектром динамических движений Атласа. Что еще более важно, это позволило создать расширяемую программную систему, которая будет расти и развиваться, давая Атласу новые возможности для восприятия и взаимодействия с его окружением.

Гуманоидные роботы имеют очень своеобразную походку. Колени согнуты, торс как можно более неподвижен. Даже робот Атлас от Бостон Дайнемикс использует движение полусидя, потому что благодаря изогнутым нога – он может удержится от падения. Подобная походка настолько распространена с роботами-гуманоидами, что стала «нормальной» походкой для роботов, но это совершено не похоже на то, как ходят люди. Мы гуляем с выпрямленными ногами, потому что гораздо легче поддерживать наш вес таким образом. Вы можете попробовать провести на себе эксперимент: согните ноги как «двуногий робот» и попробуйте передвигаться, это быстро вас утомит, потому что всегда нужно держать мышцы ног в напряжении.
В ИЧМП (Институт Человеко-Машинного Познания) робототехники заняты решением этой проблемы, обучая Атласа ходить так же, как мы. Преследую цель, чтобы сделать роботов-гуманоидов более эффективными, более естественная походка могла бы сделать их более универсальными, а также способными ходить по разнообразному ландшафту, так как нынешние роботы, проводят все свое время на приземистости.
Большинство роботов не ходят как человек, потому что согнутые колени дают им намного больше стабильности. С согнутым коленом вы можете либо сгибать его больше, либо выпрямить его, чтобы помогает вашему роботу держать баланс, тогда как прямые ноги означают, что балансирование должно выполняться в основном с помощью лодыжек. Еще одно отличие, которое вы можете заметить, это то, что роботы, как правило, поднимают ноги прямо вверх и снова возвращают их, в то время как Аталас после доработок использует движение «носок», как это делают люди.
Чтобы заставить Атласа пройти путь, ИЧМП разработал новую структуру управления всем телом, а затем настроили контролер на то, чтобы дать роботу возможность продвигаться с прямыми ногами, не требуя при этом, чтобы ноги постоянно воздействовали на землю. Выходя из других движений (например, движения ног робота) без ограничений, естественное поведение походки возникает самостоятельно, подобно движению ноги. Другими словами, ИЧМП не нужно было специально писать под это новый код, это было просто лучшее решение, которое контроллер смог придумать для ходьбы, пытаясь поддерживать ноги в прямом состоянии. Разумеется, кажется многообещающим, что контроллер с меньшими ограничениями привел к более естественной походке, и в реальных испытаниях Атлас мог ходить по разным ландшафтам и даже реагировать на слегка агрессивные толчки с прямыми ногами.
Сегодня мы тычем в роботов палкой, а завтра они вывесят наши головы на заборах.