

Техноманьяки
Показать полностью
3
Всем привет!
Начал сборку проекта, основанного на сериале "Звездные врата GS-1". Я большой его фанат, поэтому идея сразу порадовала.
Спасибо за идею @Kirillko312.
Итак, нам понадобится: 3д принтер, PLA пластик (сохраним природу все такое)
Модель самих врат: http://www.thingiverse.com/thing:571853
Немного терпения для борьбы с принтером.
Что должно получиться:

Итак, приступаем к снятию размеров и пониманию сколько нам понадобится заходов печати.
Понимаем что макет изначально огромный.


Но это не предел для моего принтера. Ищем предел! Самая больная деталь имеет размеры 146х146 мм. В итоге максимальный размер составил 187х187, больше не влезет в область печати.
Для тех кому интересно немного подробностей о самой печати:
Печать с Raft (то есть со специальным слоем пластика, которые делает сам принтер для идеального выравнивание подложки).
Печать слоями в 0.2 мм, мой любимый размер.
Итого будет затрачено на основание всего... целых 400 грамм пластика... офигеть.
И все это дело будет производиться больше суток, а точнее 26 с копейками часов.
721 слой не считая Raft.

Вообщем начинаем с более мелких деталей, для начала само кольцо. Основание я решил переделать под другой шаговый двигатель. Тот что изначально очень "жирный" для таких целей. Целых 20 баксов блин! Аналог за 5 баксов вполне справится. Об этом в другой части.
А пока я напечатал только пару деталей.
Верхний "Шеврон". Это задняя декоративная часть, она двигаться не будет.

Ну и для понимания масштаба получившегося кольца - рядом лежит MacBook 15. Да, врата будут офигенно большие.

И видео о том, как это будет работать.. когда будет работать.
Немного о будущем:
- Сначала распечатаю все кроме основания. Соберу и расскрашу, да, я умею... ну надеюсь..
Хочу придать им очень реальный вид.
- Потом переделаю подставку, чтобы поместить туда Arduino Yun (у меня их просто есть пара) и всю электронику в новой компановке.
- Светодиоды будут RGB, чтобы сразу не запариваться.
- Источник питания, он же LiPo аккум будет тоже в подставке, чтобы можно было это дело без провода таскать.
- Перепишу скетч (уже начал..) чтобы все это дружило с новым железом и....
- Чтобы сделать Web страничку с набором номера, а точнее сделать вот это или нечто подобное (Именно поэтому Yun):
Всем спасибо, продолжение следует!
П.С. Не откажусь от любой помощи =)
Баянометр ругался на какую-то ересь с рублем..
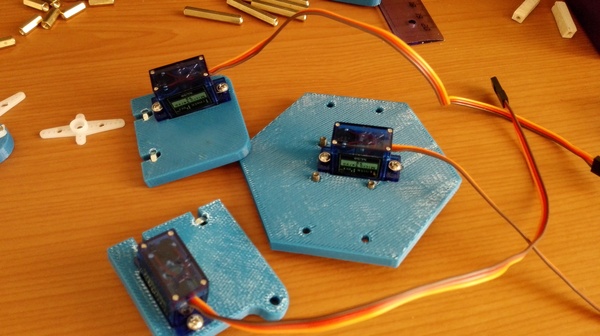
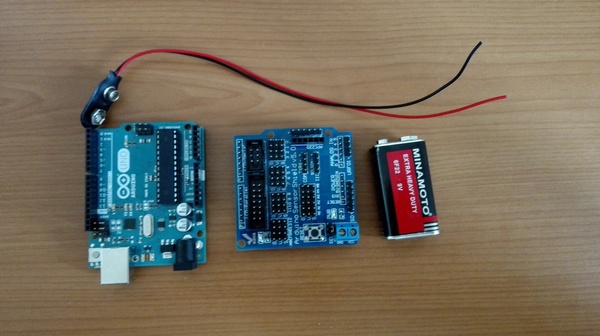
Немного про мозги системы. Как я уже говорил, здесь используется Arduino Uno, а для крепления серв был приобретен Sensor Shield V5 (300 р.). Конечно, можно было бы обойтись и без него, но паяю и делаю платы я ещё хуже (вообше никак).





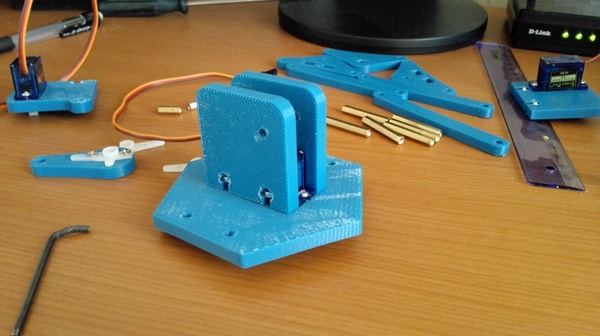
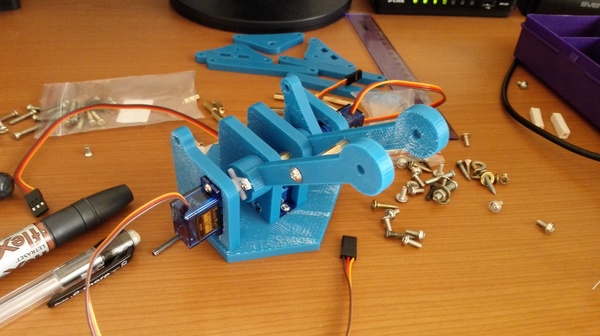
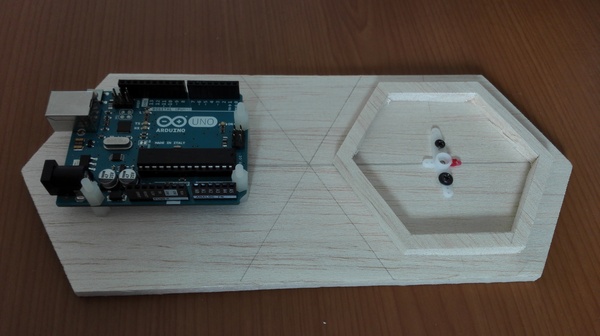
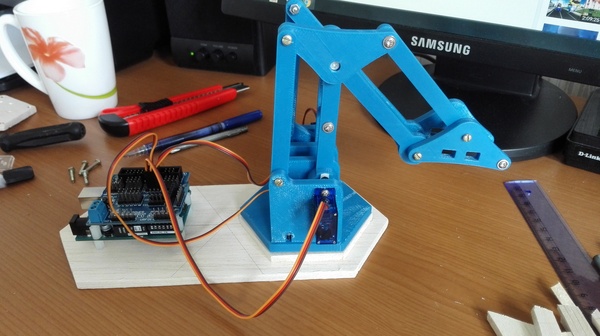
Впоследствии была напечатана нормальная платформа, а главное, клешня, для всего этого чуда (для клешни был куплен 4 сервомотор Tower Pro 9g уже за 240р., сами детали 630р.). Здесь же опять я немного накосячил с размерами, все дорабатывалось шкуркой и напильником.
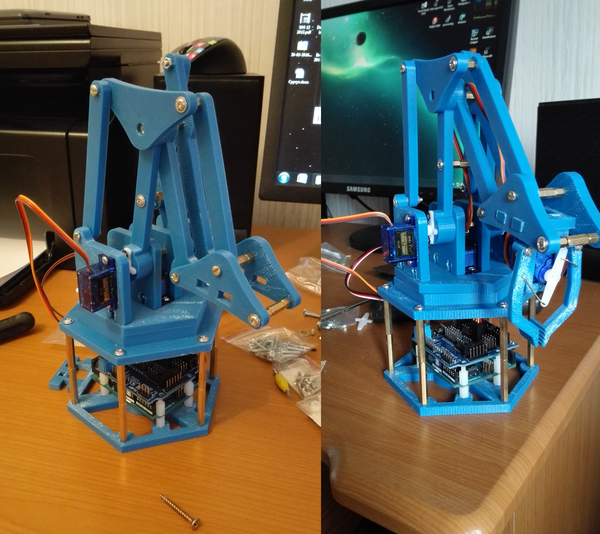
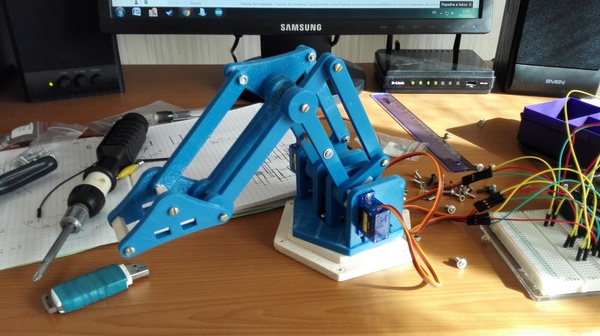
И вот наше творение готово, можно запускать и кричать: «Оно живое, живое!!!», а нет, настало время писать прошивку. (Дальше будет более нудная часть, кто не хочет читать, как делалась прошивка, листайте дальше.)
---про прошивку---
В общем и целом для работы с сервами использовалась библиотека Servo. Стандартные функции давали слишком резкие движения, и моторов могли двигаться лишь поочередно (это не очень большой минус, но хотелось одновременной работы). Поэтому была написана собственная функция для каждого из моторов (их всего 4). За каждый проход базовой функции loop() проверяется положение мотора с помощью Servo.read(), если он не совпадает с заданным углом, на 1 приближаем его к нужному углу. Таким образом, вышла довольная плавная работа манипулятора.
---конец---
А теперь история про софт для компа
Вначале все писалось на Proccesing, этот язык (среда разработки?!) часто рекомендуют для работы с ардуино через COM порт. Выглядело это так:

Не очень красиво, не правда ли?! Отсутствие нормального редактора интерфейсов (хотелось «красииива») сподвигло писать все на C#.

Общий функционал программы таков: управление сервами из программы, подключение геймпада и передача команд с оного на робота, выполнение «программы» по координатам. Вообще в начале хотелось сделать полет, где можно было бы тыкнуть на участок и таким образом рисовать (надеюсь, вы поняли), это даже вышло, но люфты манипулятора заставили отказаться от этого (весьма не точно выходило выполнение такого рисования).
---КОНЕЦ ИСТОРИИ ПРО СОФТ---
А теперь видео примеры того, что же в итоге вышло. Нужно ещё многое допиливать и в программе и в прошивке, но кое-что манипулятор уже может сделать
Конечно не всегда с первого раза
---ИТОГИ---
Очень круто создать что-то с ноля полностью своими силами, было сделано много проб и ошибок, но результатом я доволен.
Что нужно учесть:
-Прикинуть мощность моторов и размеры робота
-Правильно смоделить/вырезать детали, чтобы не было люфтов (да, это и так всем ясно, но проблема от этого не исчезает)
Стоимость всей затеи:
3 х сервы Tower Pro 9g = 480р.
1 х серва Tower Pro 9g = 240р.
Печать всех деталей = 1532р.
Болты, гайки, крепления (называются крепления для плат) ~300 р
Arduino Uno = 600р. (весь набор Амперка X обошелся в 3000р.)
Sensor Shield V5 = 300р.
Общий итог: 3452р.
Ссылка на скачивание: Прошивка,программа,фалы деталей

И ещё немного фоточек


p.s. баянометр ругается на лигу инженеров
Привет мои юные инженеры! Эта история о том, как, не имея никаких знаний в робототехнике, схемотехнике и прочего, удалось собрать рабочую модель робо манипулятора и осуществить детскую мечту. Осторожно, много букв… (в второй части будет краткий итог для тех, кто не осилил текст)
Все началось в январе этого года. Был приобретен стартовый набор с ардуино от «Амперки» (не реклама, они мне не платят), первые пробы этого чуда были обычными, помигал светодиодиком, сделал управление светодиодом через ПК, поиграл с кнопками. Но хотелось чего-то более грандиозного, тут то и пришла идея создания робота манипулятора. Ладно, хватит мять сиськи, начнем же!
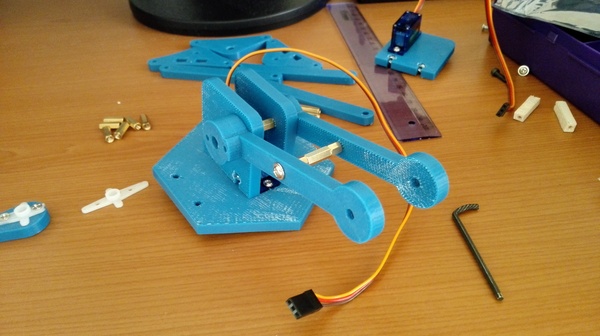
Для начала были куплены 3 сервомотора Tower pro 9g (160 руб. каждый) и доска бальзы (из неё вроде делают модели самолетов). Не берите бальзу для такого! Я, конечно, этого не знал, поэтому пытался сделать что-то из нее, благо материал был мягкий и легко резался канцелярским ножом. Но обработка бальзы это ад, мягкость это и плюс, и огромный минус. Намучившись с этим материалом (знатоки не ругайтесь, бальза хороша для других задач), было принято решение печатать детали на 3D принтере (можно было резать и оргстекло, но очень хотелось попробовать 3D печать). Детали моделились в SketchUp, и экспортировались в .stl с помощью расширения.
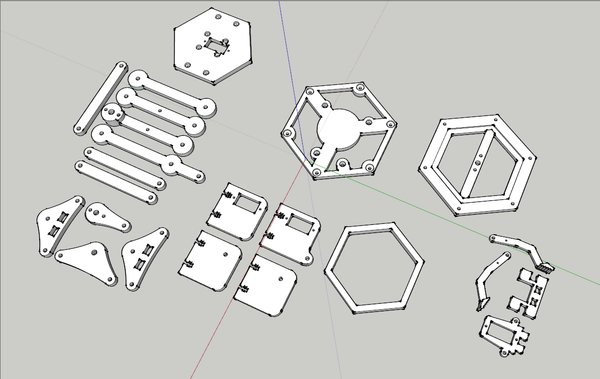
В итоге получилось следующее:
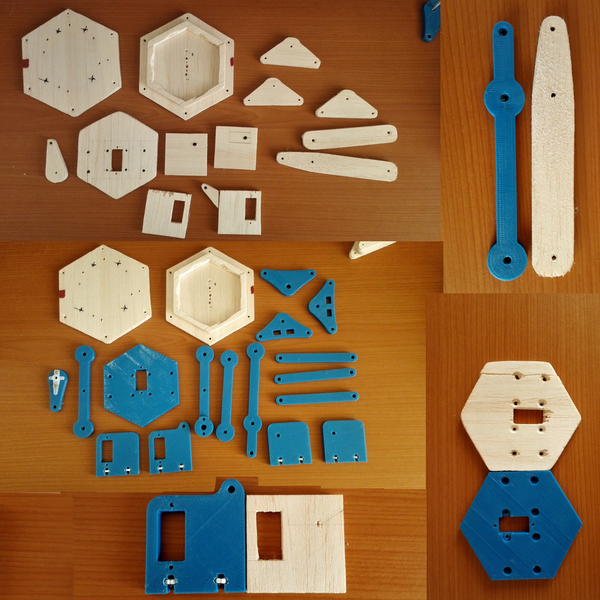
Печать вышла в 902 руб. Кстати, поскольку до этого не приходилось делать модель для печати, я накосячил с размерами отверстий, и из-за этого у манипулятора появилось мнооого люфтов (кидайте тапками).

В качестве прообраза был взят проект uArm и meArm. В первом использовались сервы u-servo us-d150a, а второй я увидел, когда уже смоделил свои детали, поэтому вышел некий гибрид .

Оказалось, что я превысил лимит по блокам в посте, поэтому через пару минут будет добавлена вторая часть с завершением сборки, рассказом про софт и прошивку, видео-примерами и общим итогом. Ссылку на вторую часть я добавлю сюда (надеюсь)
UPD. Часть 2!!!
p.s. баянометр ругается на господина и лигу инженеров
