


Текнолоджия
Самокат с полным приводом на Али, на Яндекс Маркете
Самокат с полным приводом на Али, на Яндекс Маркете
Инвалидное кресло с приводом от электросамоката
Весна 23-го. В разгаре война граждан с кикшерингами и самокатами. Из каждого холодильника только об этом! И меня осенило! Ни разу ни катался на самокате! Купил механический Рейзор 8". Зверь! Складной и весит 3 кг! Прокатился. Прикольно! Проехал километров 8 по приколу. К концу пути стала сильно болеть нога... Ахиллесово сухожилие, мать его! В обычной жизни оно не сильно используется человеком. А , на самокате очень даже! Отхромал месяц! Потом стал аккуратнее с выбором дистанции.
Попробовав механический, купил электрический. Больших надежд на него не возлагал, поэтому взял самый сток. 300Вт 6Ач. Яматто. 8", переднее надувное, заднее литое, складной.
Привезли мне его на работу. Зарядил и, вечером - пробовать!. Поехал. Очень здорово! Он юркий и быстрый! Только, вольтметр у него странный... Километров 8 туда проехал на всех 5 "палках" заряда. Когда пропала 5-я палка поехал обратно. Очень быстро пропала 4-я и 3-я. Прибор снизил скорость и стал уныло плестись. Вскоре встал. Оказалось, что на электросамокате нельзя ехать без аккумулятора. Накат почти нулевой. Пришлось 6 км вести в руках. Натрахался я его волочить.)) Запас хода - 10-12 км. Если повезет.
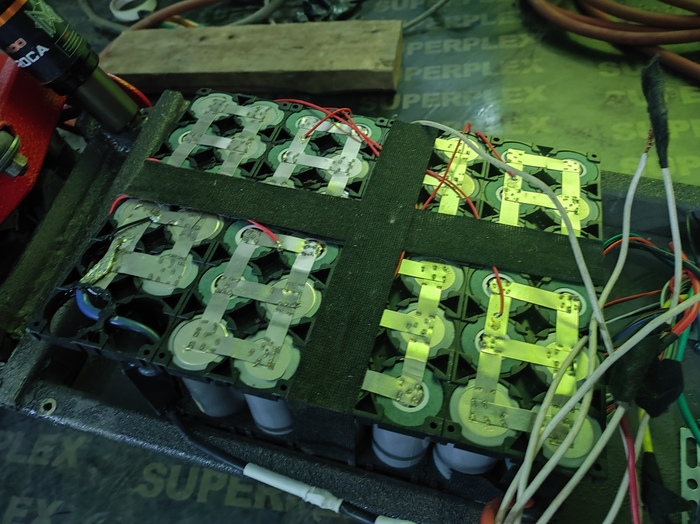
Чтож! Надо думать аккумулятор! У самоката с местом плохо... Нашел выход - ячейки 21700 на 5 Ач. В платформу со скрипом поместились. Итого 10 Ач. Вторую батарею - в металлической коробке на трубу руля. Еще 10! Вот это уже что-то! 40+ км. Поездил на нем на работу. Ощущения совсем другие чем на велосипеде! И правда, стоишь как петух в курятнике и башкой крутишь!))
Плюсы:
Маневренный, низкий центр тяжести, комфортное положение ездюка. Занимает мало места, можно хранить в квартире.
Минусы:
По поребрикам не попрыгаешь. На всем, что не асфальт встает колом. Даже на щебне, не говоря о песке иди снеге. Довольно жесткий не смотря на передний амортизатор.
Переднее надувное колесо поменял на штамповку. //Как-то лопнуло оно у меня на скорости и сразу сдулось. Летел я знатно! Обошлось без серьезных последствий. Но, сразу купил мотокуртку, наколенники и налокотники. Ибо, страшно!;))
Сейчас лежит бедняга в гараже. Разрбраный. За зиму обе батареи ушли в 0. БМС отрубила. Контролёр, даже выключенный, что-то жрет. Стал заряжать, обе батареи доходят до 39В и отключаются. Разбаланс, мать его... Одну отвёз на работу и отбалансил. Несложная процедура, но долгая и муторная. Каждую ячейку надо отдельно зарядить до определенного напряжения. Потом, всю батарею разрядить, проверить ёмкость. Все хорошо с ней! Потеряла процента три. Это хороший результат! Теперь нужно балансить вторую. Вот он и разобран.
Вроде все просто а как начинаеш делать одни вопросы) при включени платы одно колеса начинает туда сюда дергаться, ьак может на градусов 10 вперед на назад, нажимаеш курок колеса начинают крутиться не с начала хода курка, ну это может так и надо, на курок реагируют нормально гдкто до середины, а когода добавляеш газа они вроде как и раскручиваются быстрее но в тоже время как будто сами себя тормозит пытаются, какойто гул и вибрация появлются , как будто с чемто борятся. Резисторы на 10 были изначально, впаял на 100 ничего не изменилось. Калибровку курка делал. Что может быть такое подскадите
В свободные зимние вечера без гаража очень скучно и уныло, решил что- нибудь собрать из подручных материалов на коленке)
Имеем:
2 колеса от квадрика.
4 колеса от гироскутера.
Дека от усилителя урал на 4Квт
Куча железок
Руль с алихи
Амморты зад и перед тоже алишка
Фара... Ну от куда же еще
Куча батареек литий-железо-фосфатных
Bms чтобы присматривала за батарейками
Два контроллера по 2 или 1.5 Квт( точно уже не помню)
Куча проводов.
Извиняюсь, фото загрузились от новых к старым) но имеем то что имеем) внешний диаметр колес 18".
Отвечу сразу- максимальная скорость 45-50км/ч
Видео- дал прокатиться другу)
















Электросамокат из гироскутера с учётом прошлых ошибок. Часть 2
Эта часть наверное больше всего вас интересует, постараюсь максимально понятно все объяснить. Как умею.
Итак, для прошивки понадобится:
Купить программатор Stlink v2, оригинальный или китайский без разницы, шьется одинаково.
Скачать и установить с официальных сайтов:
Visual Studio Code (далее вск)
Stm32 Stlink Utility.
В процессе установки стлинк утилиты согласиться на установку драйверов программатора.
Далее открываем Visual Studio Code и устанавливаем дополнения:
Russian Language Pack for Visual Studio Code
Vscode-pdf - понадобится для просмотра файлов пдф
PlatformIO IDE (далее пио).
На начальном этапе этого достаточно, что будет необходимо вск скачает и установит самостоятельно.
Качаем исходник прошивки, он в открытом доступе и бесплатный, https://github.com/EFeru/hoverboard-firmware-hack-FOC . Ссылка вроде не содержит ничего противоправного, прошу прощения, если что не так. Распаковываем.
Там же есть подробное описание от автора прошивки
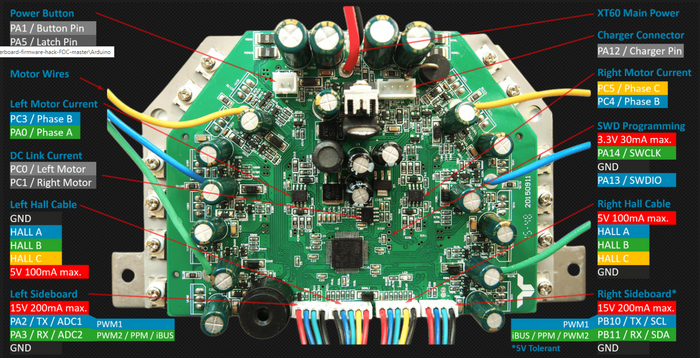
Берём гирик, разбираем. Должна остаться голая рама с колёсами, АКБ и плата управления с кнопкой включения. Остальное не нужно, вытаскиваем чтоб не мешало. Следует понимать, что после прошивки обратно гириком он уже не станет. Берём паяльник и припаиваем управление согласно схемы. Самокатные курки с датчиками холла можно заменить обычными переменными резисторами на 10 кОм. Подтягивающие резисторы и конденсаторы паяем непосредственно на плату. Если не планируете использовать круиз-контроль то кнопку на него можно не паять.
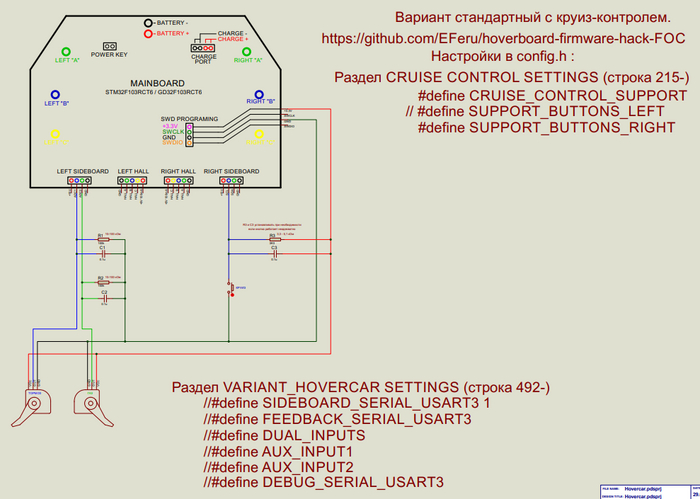
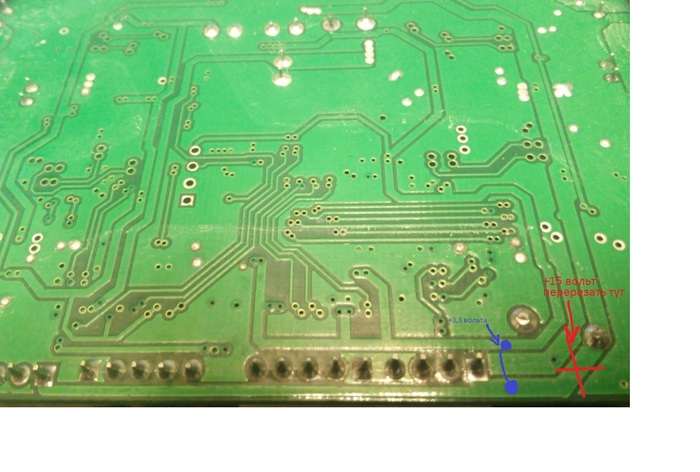
Внимание!!! На разъёмах левого и правого уартов присутствует напряжение 15 вольт! Чтоб случайно не спалить проц неверным подключением рекомендую сразу перерезать дорожку, идущую от стабилизатора 15 вольт на разъёмы. После этого можно подать на разъёмы 3,3 вольта перемычкой. Так будет удобнее подключать курки, можно будет использовать штатные разъемы. Также припаиваем разъём программирования, 4 пина SWD programming рядом с процом. Распиновка платы гирика, полное описание со схемами также есть в исходнике в папке docs.
Платы могут отличаться по форме и по маркировке процессора - stm32f103rct6 и gd32f103rct6. Второй - китайский клон стмки, но шьётся и работает также. С другими процессорами прошивка работать не будет.
Спаяли? Отлично, проверьте ещё пару раз, чтоб всё было верно!
Шьём плату не подключая АКБ. Питание от программатора!!!
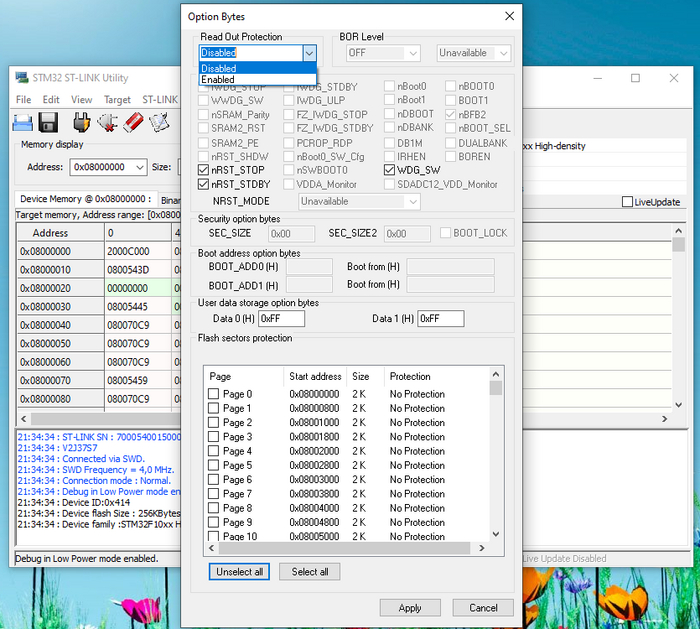
Подключаем стлинк, открываем стлинк утилиту, выбираем Connect, после успешного подключения Target - Options Byte и снимаем защиту от чтения, нажимаем Apply... Все, гироскутером эта плата больше не станет, чип стёрт. Жмём Disconnect, закрываем утилиту.
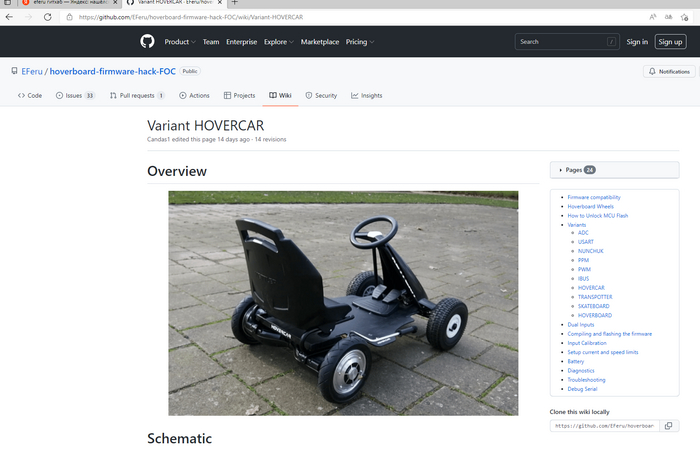
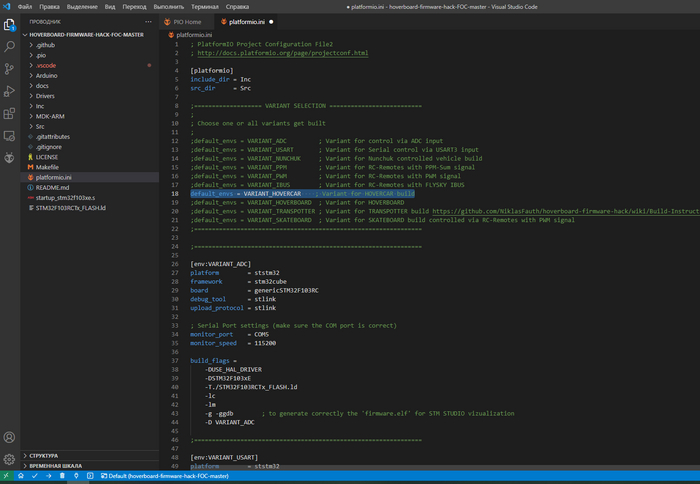
Открываем вск - пио - открыть проект и указываем в папке с исходником файл platformio.ini . В открывшемся файле выбираем нужный вариант прошивки - VARIANT HOVERCAR
Понадобится некоторое время, чтоб программа докачала нужные файлы, после чего в нижнем левом углу появятся кнопки сборки и загрузки

Далее выбираем в папке Inc файл config.h
Я не буду описывать все настройки, которые есть в этом файле, тут и десятка постов не хватит. Опишу только самые необходимые сейчас.
Листаем вниз до раздела MOTOR SETTINGS
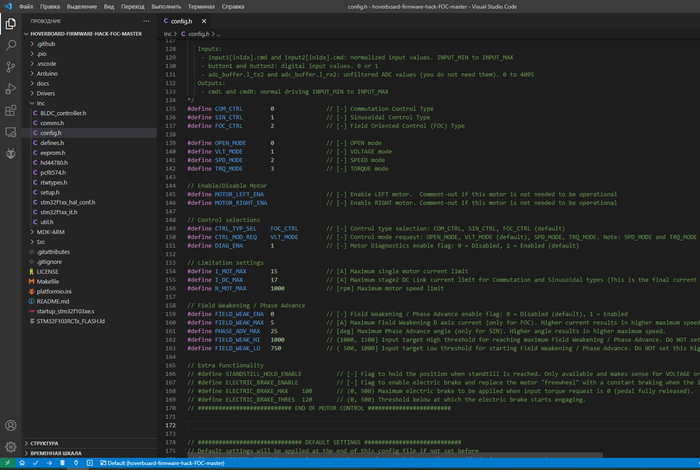
Тут можно включить или выключить мотор и настроить
I_MOT_MAX - максимальный общий ток одного колеса, соответственно на 2 колеса будет х2
I_DC_MAX - максимальный ток фазы, выставляем на 2 ампера больше общего тока
N_MOT_MAX - максимальные обороты колеса, соответственно максимальная скорость.
FIEL WAKE ENABLE - ослабление поля, для любителей погонять. Даёт хороший прирост скорости, но и батарею жрёт. На штатном АКБ гирика включать совсем не рекомендую, она сдохнет, да и токи больше 10 ампер на ней ставить не стоит.
Идём в раздел HOVERCAR SETTINGS
Тут настраивается режим работы моторов TRQ, SPD или VLT_MODE, для самоката лучший вариант TRQ, так как тут присутствует накат.
Неиспользуемые в самокате функции нужно закомментировать:
//#define SIDEBOARD_SERIAL_USART_3
//#define FEEDBACK_SERIAL_USART_3
//#define DUAL_INPUTS
#define AUX_INPUT1 и #define AUX_INPUT2 ставим в значения первую цифру 0, отключено.
#define PRI_INPUT_1 и #define PRI_INPUT_2 ставим в значения первую цифру 3, автоопределение типа ручек газа и тормоза
Тут же можно изменить направление вращения моторов, достаточно раскомментировать #define INVERT_L_DIRECTION или #define INVERT_R_DIRECTION. В принципе, тут все.
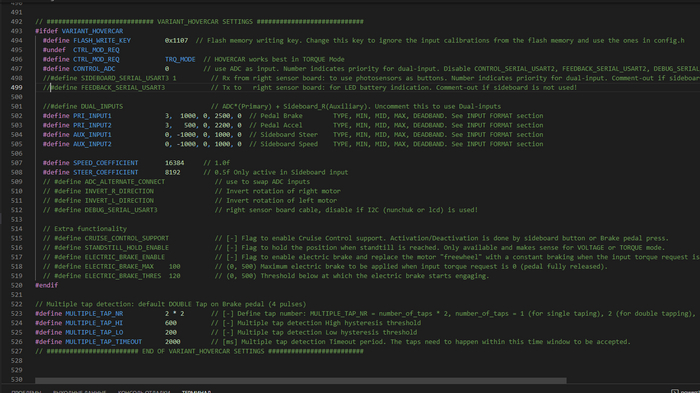
Круиз-контроль включается в разделе CRUISE CONTROL SETTINGS, если используем, раскомментировать строки #define CRUISE CONTROL SUPPORT и #define SUPPORT BUTTONS RIGHT.
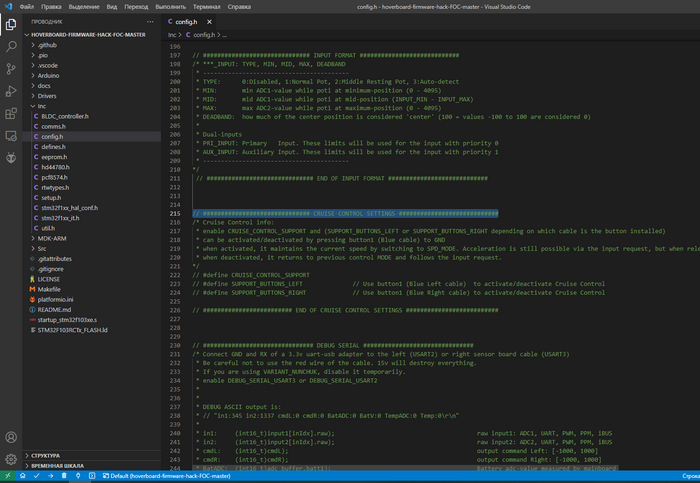
Нажимаем в левом нижнем углу галку build, вск скомпилирует прошивку и если всё сделано верно выдаст SUCCESS!
Подключаем программатор, нажимаем стрелку upload. В первый раз нужен интернет, вск будет скачивать нужные для работы с программатором файлы. Потом будет проще.
Перед каждой прошивкой нужно стирать чип полностью, стираем через стлинк утилиту.
После прошивки отсоединяем программатор, подключаем АКБ, ставим ручки газа и тормоза в минимальное положение. Для того, чтоб всё заработало, нужно сделать калибровку ручек, для этого:
кратковременно нажимаем кнопку вкл, сразу после пиликанья мелодии включения нажимаем опять и удерживаем 5-7 секунд, пока плата не пискнет высоким и низким тоном, отпускаем вкл, 3-4 раза дергаем курки от мин до макс и опять кратковременно нажимаем вкл. Калибровка окончена.
Также не всегда моторы запускаются сразу, это связано с тем, что связь сигналов датчиков холла в колесе и фаз обмоток двигателя в родной прошивке гирика и в этой не совпадают. Если после нажатия газа моторы не закрутились и плата начала пищать короткими писками - нужно подобрать верную фазировку, для этого отключаем питание, меняем местами любые 2 силовых провода мотора и пробуем запустить. Потом следующие 2, пока не поедет.
Ещё бывает так, что после нажатия и отпускания газа колёса не останавливаются, а при нажатии на тормоз начинают крутиться взад-вперед. Это нормальное явление, если колёса вывешены. Когда поставите на землю всё будет ок.
Прошивка поддерживает несколько методов управления, самые популярные это курки и PWM и PPM, эти два режима позволяют подключить радиоаппаратуру от RC моделей. Также позволяет управлять с двух входов с выбором приоритета, это полезно для детских машин, когда ребёнок управляет машиной сам, но радиопульт с приоритетом у папы.
Вроде всё рассказал. Если остались вопросы - пишите в комментарии, отвечу всем, может не сразу, но отвечу.



