История развития джетпаков. Часть 2.
Предыдущая часть здесь.
Краткое напоминание:
20 апреля 1961 года Гарольд Грэм совершил первый свободный полёт (без страховочных тросов) при помощи ракетного ранца (Bell Rocket Belt), сделанного согласно конструкции Венделла Мура. Однако данный ранец оказался непригоден для использования в военных целях США по таким причинам, как: слишком малая продолжительность полёта (~20 секунд), огромный шум во время полёта (~130 дБ, практически как самолёт на старте), большой расход дорого топлива (пероксид водорода), необходимость применения термостойкого материала костюма лётчика (температура парогазовой смеси на выходе может достигать ~700 °C), большой вес устройства (~50 кг).
17 июля 1964 года Венделл Мур и Джон Халберт подали заявку на патент нового типа летательного ранца, основой которого на этот раз был турбореактивный двигатель. Время полёта предполагалось увеличить как минимум до 10 минут, высоту - до 3 км, дальность - до 16 км. По словам Венделля Мура, данный аппарат в теории был способен развивать максимальную скорость около 160 км/ч.
30 декабря 1965 года компания Bell Aerosystems заключает контракт с DARPA (агенство по оборонным разработкам США, было создано в ответ за запуск Советским Союзом первого спутника) на производство нового летательного средства: Bell Jet Flying Belt.
7 апреля 1969 года был официально представлен турбореактивный ранец. В нём использовались двигатели WR-19, изготовленные компанией Williams Research Corporation. WR-19 считался самым малогабаритным турбореактивным двигателем в мире. На этот раз для совершения свободного полёта был приглашен опытный военный лётчик Роберт Куртер. Во время первого демонстрационного полёта он пролетел около 100 метров на высоте 7 м со скоростью 45 км/ч.
Видео полёта Роберта Куртера.
29 мая 1969 года Венделл Мур умер от сердечного приступа в возрасте 51 года, ни разу не совершив свободного полёта на своих изобретениях.
С этого момента военные США окончательно потеряли интерес к подобному виду устройств. Не смотря на улучшенные характеристики турбореактивного ранца, его текущая конструкция всё также не допускала возможности применения в условиях реальных боевых действий. Турбореактивный двигатель нуждался в наличии стартового устройства (в реактивном ранце не требовалось), которое не предусматривало перезапуск в случае остановки двигателя во время полёта по причине какой-либо неисправности. Слишком большой вес аппарата (пустой/полный бак: 40/56 кг, у ракетного ранца: 28/50 кг) обуславливал необходимость использования специальной опоры для комфортного запуска (без надрыва спины лётчика).
В случае поломки двигателя во время полета был предусмотрен парашют, однако он был эффективен только на высоте более 20 метров. Необходимость в проведении тренировок с целью обучения персонала искусству управления подобным ранцем требовала дополнительных затрат денег и времени. Также к недостаткам относили высокий уровень шума и большую температуру выходных газов (~300 °C).
23 января 1970 года все права, лицензия и документация на Jet Flying Belt были проданы компании Williams Research Corporation за 5.600$. В музее этой компании данный ранец хранится до сих пор. В Williams не стали запускать серийный выпуск турбореактивных ранцев, ибо затраты только на производство одного двигателя достигали 85.000$. Однако эксперименты с использованием двигателя WR-19 в качестве основы персонального летательного средства были продолжены. Роберт Куртер был нанят в качестве основного тестового пилота. Модифицированный и переименованный в Williams F107 данный двигатель в дальнейшем использовался также в крылатых ракетах "Томагавк" и "Аль-кам".
Рассмотрим подробнее принцип работы турбореактивного двигателя WR-19, который на тот момент считался прорывной технологией. Для демонстрации того, настолько маленьким получилось данное устройство, в Williams сделали фото, на котором девушка держит в руках WR-19 на фоне турбины самолёта.

Масса двигателя - 30.3 кг. Пластиковые топливные баки (полные) добавляют к этому ещё 13.6 кг. Размеры: 0.6 м в длину, 0.3 м в диаметре. Во время типового полёта данный двигатель сжигает примерно 1.8 кг топлива (керосин) за минуту (зависит также от массы пилота).
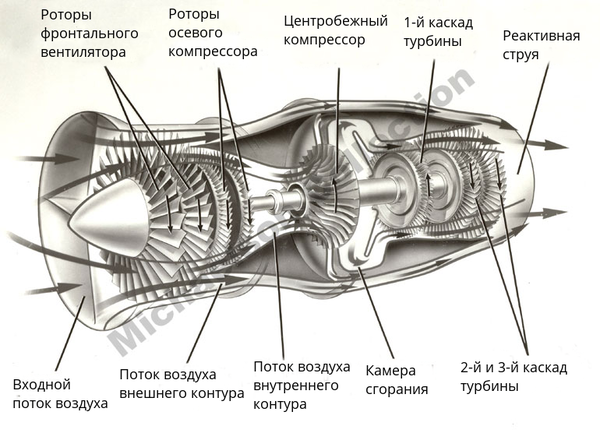
В ранце Jet Flying Belt двигатель устанавливался вертикально, воздухозаборник при этом был направлен вниз. Благодаря использованию двухконтурной конструкции входящий воздух разделялся на два потока: один направлялся во внешний, другой - во внутренний контур. Воздух внутреннего контура (также называется первичный воздух) принимает непосредственное участие в формировании топливно-воздушной смеси. Воздух внешнего контура смешивается с потоком выходящих горячих газов (реактивная струя), охлаждая их и защищая пилота от высокой температуры.
Как показано на рисунке ниже воздух, прежде чем попасть в камеру сгорания, сжимается двумя осевыми и одним центробежным компрессором. От степени повышения давления компрессорами зависит КПД двигателя. Чем больше воздуха нагнетается в камеру сгорания, тем больше сжигается топлива и, соответственно, повышается тяга. Также благодаря компрессорам температура воздуха повышается ещё до момента попадания в камеру сгорания, при этом в результате создания правильной разности давлений обеспечивается движение воздушных потоков в нужных направлениях.
Из камеры сгорания нагретая топливно-воздушная смесь поступает на турбину. Как видно на рисунке, турбина состоит из нескольких каскадов. При прохождении через каскады турбины смесь расширяется (ибо давление и температура начинают снижаться) и приводит её в движение. Турбина соединена валом с роторами компрессоров, в следствие чего часть энергии уходит также на их раскрутку. В конце концов смесь истекает на большой скорости (~396 м/с) из реактивного сопла, создавая реактивную тягу.
С точки зрения пилота регуляторы управления остались такие же, как и у реактивного ранца. Правая рукоятка контролирует тягу двигателя, левая - маневрирование. Таким образом, для совершения поворота пилоту необходимо повернуть левую рукоятку в нужную сторону, при этом технически сам поворот осуществляется за счёт отклонения управляемых реактивных сопел.
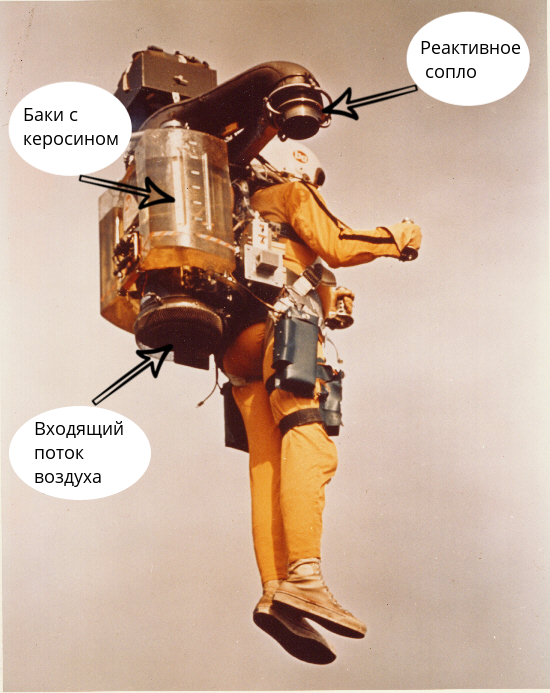
При использовании двигателя WR-19 в турбореактивном ранце Jet Flying Belt выходная реактивная струя разделялась на два потока. Для облегчения понимания всей конструкции я сделал ещё одно фото:
В январе 1971 года командование морской пехоты США приняло решение о запуске новой программы по разработке летательного средства STAMP - Small Tactical Air Mobility Platform (Малая Тактическая Аэромобильная Платформа). В рамках этой программы принимали участие различные компании, занимающиеся в то время производством авиационного оборудования. В частности, одной из компаний (AiResearch Manufacturing) был даже предложен прототип летающего джипа.
Для спонсирования данной программы морпехи пытались добиться выделения 4 млн. $ из резервных фондов Министерства обороны. Однако безуспешно. В конце концов было решено использовать свои собственные фонды (кои на тот момент составляли 500 тыс. $) для проведения более аскетичных, чем планировалось, испытаний с целью определения того, может ли STAMP в принципе быть эффективно использована на практике с учётом последних достижений науки и техники.
1 сентября 1972 года был заключен контракт с Williams Research Corporation (той самой компанией, которой были переданы все права на Jet Flying Belt) на разработку и тестовую демонстрацию реактивной летающей платформы. Устройство должно было быть способно выполнять такие задачи, как разведывательные мисси, слежение, обеспечение коммуникационного взаимодействия, создания дымовой завесы и др. Среди основных технических требований выделяются следующие: время обучения управлением данного девайса должно быть предельно коротким, простой морпех должен быть в состоянии провести техническое обслуживание (без привлечения специализированных механиков), в качестве топлива необходимо использовать только широкодоступное сырье, запуск устройства должен в состоянии произвести один человек без дополнительной технической поддержки. При этом оно должно было перевозить как минимум 2-х человек сразу.
Разрабатываемомой платформе в Williams Corporation было дано кодовое имя WASP -Williams Aerial Systems Platform.
В декабре 1973 года были проведены первые демонстрационные полёты платформы WASP, правда, с привязанными страховочными тросами. Устройство во многом позаимствовало из конструкции Jet Flying Belt, однако на этот раз на борту могло уместиться 2 человека.
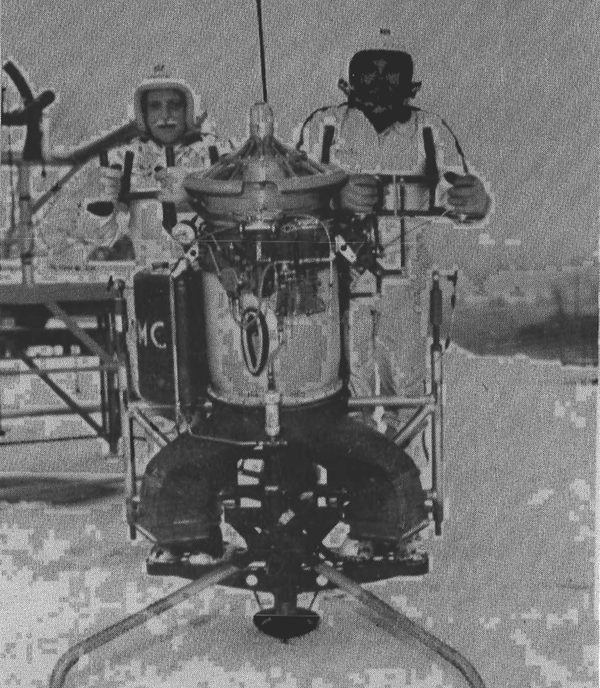
В отличие от Jet Flying Belt, платформа WASP предусматривала размещение турбовентиляторного двигателя спереди от пилотов, воздухозаборником вверх. В качестве двигателя использовалась модифицированная версия WR-19: WR-19-9 BPR-5. Конструкция содержала теперь 3 реактивных сопла (вместо 2-х), направленных вниз. Температура реактивной струи на выходе была снижена до ~132 °C. Потребление топлива: 2.4 кг/мин. Максимальная грузоподъёмность: 268 кг.
Также изменилась система контроля полёта. "Рысканье" (поворот влево-вправо, англ. yaw) осуществлялось, как и раньше, при помощи управления вектором тяги - за счет поворота сопла. Для крена (англ. roll) и тангажа (вращение вверх-вниз, англ. pitch) использовалось перераспределение тяги между тремя реактивными соплами для создания отклонения в нужном направлении.
В виду отсутствия должного финансирования свободный полёт на данном устройстве так и не был совершен вплоть до окончания контракта в январе 1974 года.
Весной 1974 года, ознакомившись с результатами завершённой программы STAMP, армия принимает решение продолжить эксперименты по созданию персонального летательного аппарата. Новая программа получила название ILD - Individual Lift Device. По сравнение с испытанной в прошлый раз моделью Jet Flying Belt в конструкции WASP армию впечатлила простота старта аппарата, размещение реактивных сопел в более безопасной для пилота области (в Jet Flying Belt сопла висели чуть выше плечей, теперь под ногами), а также новые разработки Williams, направленные на усовершенствование двигателя WR-19.
До конца 1977 года в программе ILD было зарегистрировано уже несколько участников. Основная концепция требуемого устройства была утверждена командованием TRADOC (Training and Doctrine Command). На этот раз главными критериями были простота и надёжность. С целью упрощения и удешевления конструкции теперь было разрешено разрабатывать девайс, рассчитанный и на одного пилота. В качестве основной задачи указывали транспортировку человека из пункта А в пункт Б. Всё, никаких грузов и вооружения. Главное - снизить затраты и упростить конструкцию так, чтобы она не требовала специальной подготовки персонала.
В сентябре 1978 года Williams получила грант в размере 1 580 000$ на разработку новой модифицированной версии WASP - WASP 2.
Для максимального упрощения способа управления аппаратом WASP 2 инженеры Williams решили воспользоваться принципом кинестетического контроля. Это означает, что теперь, для крена или тангажа пилоту не нужно было нажимать ни на какие рычаги/рукоятки - достаточно либо просто наклониться, либо отойти (была предусмотрена специальная платформа) в нужном направлении. Но две пресловутые рукоятки из Jet Flying Belt таки остались - одна для управления тягой, другая - для поворота по/против часовой стрелки. Вот так они выглядели по задумке инженеров:

В качестве двигателя было решено использовать доработанную версию F-107 (применявшуюся в крылатых ракетах). В первую очередь необходимо было повысить надёжность данного двигателя, ибо неисправность во время полёта человека (в отличие от ракеты) вела неминуемо к смерти.
Сам двигатель был теперь заключен в алюминиевую оболочку. Для обеспечения входящих потоков воздуха по бокам конструкции были сделаны две воздухозаборные решетки.
17 апреля 1980 года был совершён первый свободный полёт при помощи аппарата WASP 2, который также называли X-Jet. Вес конструкции без пилота и топлива оказался 107 кг.
Если вкратце, то WASP 2 не оправдал оказанного ему высокого доверия. Вот лишь небольшое сравнение ожидаемых и полученных характеристик:
Время полёта: хотели 30 минут; результат - 5.3 минуты;
Максимальная скорость: хотели 96 км/ч; результат - 75 км/ч;
Высота полёта: хотели 1.2 км; результат - чуть больше 300 м и т.д.
В теории результаты должны были получится лучше, но для обеспечения необходимой военным маневренности данный аппарат приходилось заправлять по минимуму. При полном баке согласно расчётам WASP 2 мог летать до 45 минут.
Вот так выглядело само устройство: (его ещё шутливо называли "летающая трибуна")

В виду неоправданных ожиданий, а также таких явных недоработок, как огромный шум (особенно при взлёте), который превышал установленные нормы (108 dba) на 20 dba возле головы пилота, и неудачная реализация системы кинестетического контроля (аппарат отклонялся при любых случайных движениях туловища), финансирование данного проекта было прекращено.
Напоследок видео самого полёта:
Продолжение следует...