
Лига Новых Технологий
1 807 постов
•
16 833 подписчика
0 просмотренных постов скрыто

Проект нового тракторного завода в Ростове-на-Дону

«Ростсельмаш» планирует в 2022 году запустить тракторный завод в Ростове, при этом закрывать производство в Канаде компания не планирует. Разбираемся в причинах подъема российского машиностроения

«Новый завод создаст сотни рабочих мест, с учетом развития смежников — тысячи. Это не только усилит компанию, но и даст аграриям более разнообразные и совершенные машины, еще более оживит Ростов-на-Дону».
Предприятие будет состоять из производственного корпуса площадью 62 тыс. кв.м с на несколькими сборочными линиями и здания для инженерных и коммерческих служб. Общая территория составит 14 га. Завод укомплектуют оборудованием для сварки, механической обработки, окраски и сборки тракторов. Планируется, что строительство завода завершится в 2023 году. Новый завод строится на месте недостроенного завода «Копнитель», позволит выйти на проектную мощность — 3 тыс. тракторов в год (в 2019 году объем производства тракторов состовлял всего 600 единиц).
«В целом ориентиры такие: объем производства три тысячи машин в год, вся документация и все управление в цифровом виде, удобная логистика. Все должно быть заточено под гибкость и быстрое освоение новых продуктов».Константин Бабкин - президент Ассоциации «Росспецмаш», совладелец Ростсельмаш
В рамках проекта в выступе главного здания предусматривается шоу-рум. Там будет выставлена техника, будут проводиться обучение, переговоры и проходить прочие виды активности.
«Комфортное место для общения людей очень важно, поскольку для того, чтобы компания сохраняла технологическое и коммерческое лидерство, она должна быть открытой к сотрудничеству, открытой к миру».Константин Бабкин - президент Ассоциации «Росспецмаш», совладелец Ростсельмаш

Сентябрь 2013 год
«Почему тракторный завод останется в Канаде»
Статья с таким заголовком даже появилась в Википедии. В сентябре 2013 года в Усть-Лабинске на совещании по проблемам российского сельского хозяйства, Путин задал вопрос российскому бизнесмену Константину Бабкину вопрос почему завод «Ростсельмаш» не переносит производство тракторов из Канады в Россию.
2 октября, 2013
«Знаменитая аналитическая записка»
Результатом подробного анализа через сравнение условий России и Канады стала «знаменитая аналитическая записка» Бабкина в ЖЖ: https://babkin-k.livejournal.com/182898.html
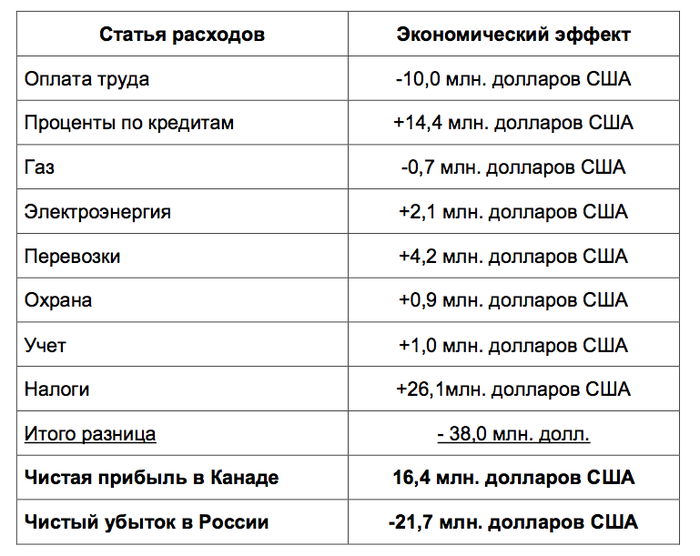
В заключении аналитической записки следует неутешительный вывод:
Как следует из проведенного анализа, перенос производства тракторов из Канады в Россию экономически нецелесообразен, так как либо ведет к прямым убыткам, либо к росту цены на продукцию.
Основные тезисы:
— В России дороже обходятся охрана предприятия (на $ 0,9 млн), электроэнергия (на $ 2,1 млн) и транспорт (на $ 4,2 млн).
— Самая большая разница — по обслуживанию кредитов ($ 14,4 млн) и налоговой нагрузке ($ 26,1 млн). Кредиты в Канаде предоставляются под 2,3 %, в России — в среднем под 11,75 %
— Россия отличается от Канады громоздкостью принятого у себя бухгалтерского учёта, слабостью государственной поддержки предпринимательства, общей атмосферой ведения бизнеса
— По оценке Константина Бабкина разница в затратах на организацию производства тракторов в Канаде и России составляет $ 38 млн: в Канаде завод приносит ежегодно $ 16,4 млн, а в России — был бы чистый убыток на $ 21,7 млн
Реакции В. В. Путина на открытое письмо К. А. Бабкина не последовало.
Предыстория: Легендарная «Госпрограмма №1432»
1 января 2013 года
Правительством принята федеральная программа субсидирования производителей сельскохозяйственной техники, которая должна была поддержать аграриев, покупающих новую сельхозтехнику и производителей сельхозтехники. То, что программа не будет работать в первоначальной редакции, стало ясно сразу после её принятия. И уже в январе ассоциация «Росагромаш» направила вице-премьеру Аркадию Дворковичу письмо о том, что производители не смогут начать работу по этой программе. Это письмо подписали крупнейшие отечественные представители машиностроения. Обращались производители и в профильное министерство, но никаких решений так и не последовало.
Апрель 2013 года
И тогда «Росагромаш» направил письмо Владимиру Путину с просьбой о помощи.
По данным «Росагромаша», в 2013 году по всем основным позициям отмечалось катастрофическое падение продаж продукции отечественного машиностроения, в то время как у зарубежных производителей наблюдался всеобщий рост продаж сельхозтехники и спроса на сельхозтехнику со стороны фермеров Европы и Америки.
Российское сельхозмашиностроение переживало не лучшие времена. За первые три месяца 2013 года по сравнению с тем же периодом прошлого года отгрузки плугов отечественного производства упали на 27,6%, культиваторов на 18%, сеялок на 27%, зерноуборочных комбайнов на 42,6%, кормоуборочных комбайнов на 18%, зерноочистительного оборудования на 20,3%.
Июнь 2013 года
В новой редакции программы предусмотрено, что производитель предоставляет аграриям скидку в 15% на выпускаемую технику, а государство субсидирует этот процент производителю техники. Принятие документа большой победой и результатом многочисленных попыток отечественных сельхозпроизводителей отстоять интересы отрасли.
«Нам потребовалось полтора года, чтобы наконец было принято положительное решение о субсидировании производителей сельхозтехники, — говорит директор российской ассоциации производителей сельхозтехники “Росагромаш” Евгений Корчевой. — Почему так долго? Мы столкнулись с упорным противостоянием со стороны чиновников, а также зарубежных производителей, в том числе белорусских, которые были заинтересованы в том, чтобы этот механизм не заработал. А ведь промышленная субсидия соответствует всем правилам и требованиям ВТО и ЕС».
«Снижение цен на отечественную технику, конечно, позитивно скажется на спросе со стороны сельскохозяйственников, — комментирует старший аналитик ФГ “БКС” Игорь Краевский. — И всё же утверждать, что это изменит ситуацию в области сельхозмашиностроения, нельзя. Помимо первоначальной стоимости техники, предприятия агропрома внимательно смотрят на такие параметры, как стоимость владения и надёжность, и зачастую отечественная техника не выдерживает конкуренции по совокупности параметров. Я предполагаю, что эта государственная мера позволит несколько оживить продажи российской техники, но то, что в результате удастся переломить тренд по увеличению закупок у зарубежных производителей, я утверждать не возьмусь»
Девальвация рубля
2014 год
Экономика России до присоединения Крыма и после — две разные экономики. До Крыма Россия была частью глобального мира, после — российская экономика начала все больше изолироваться. Изоляция шла медленно, но уверенно. Набиуллина не знала, что именно будет происходить дальше, но прекрасно понимала, что рублю такая политика не сулит ничего хорошего.
Курс постоянно падал, ЦБ всю весну, лето и осень пытался поддерживать его интервенциями, потратив шестьдесят пять миллиардов долларов. Но это не сильно помогало отечественной валюте: курс рубля все равно снижался, а международные резервы страны катастрофически таяли. С марта по декабрь 2014 года Россия потратила из них, в том числе на поддержку курса, более ста миллиардов долларов, или больше 20% всех резервов.

Два молодых заместителя в Минфине, которые пришли в чиновники из инвестбанкиров, Алексей Моисеев и Максим Орешкин не могли хладнокровно наблюдать, как политика пожирает рубль, как быстро и впустую тратятся международные резервы. Они написали письмо в ЦБ о расточительстве. Мол, хватит выбрасывать валюту на ветер, наступила пора отпускать рубль в свободное плавание, то есть вводить режим free float. Это сбалансирует его, зафиксировав на комфортном уровне для нынешнего состояния экономики, и сбережет международные резервы, которые еще сто раз смогут пригодиться. Настала пора, уверяли они, сделать рубль самостоятельным, как долгое время уже обещали. Пришел тот самый момент.
2016 год
«Ростсельмаш» перенёс производственную линию по выпуску тракторов модели Versatile 2375 из Канады в Ростов-на-Дону. До этого в России производилось только 10% комплектующих этой модели трактора. После переноса площадки в Ростов уровень локализации производственной линии составляет 67%.

Решение о переносе части канадского производства в Ростов-на-Дону было связано с девальвацией рубля, сделавшей производство в России более выгодным, а также дополнительной господдержкой аграриев. В частности, правительство России тогда утвердило 25% субсидии на покупку отечественных машин.
2017 год
Доля российской сельскохозяйственной техники на внутреннем рынке достигла 56%. На субсидии по госпрограмме №1432 были выделены рекордные 15,6 млрд рублей.
2018 год
Участниками госпрограммы №1432 могли стать производители сельхозтехники, зарегистрированные на территории РФ более трёх лет назад, имеющие полный цикл производства и дилерскую и сервисную сеть не менее чем в 40 регионах страны.
В 2013 году таких предприятий-производителей было 16, в 2018 году — свыше 70 в 37 субъектах Российской Федерации.
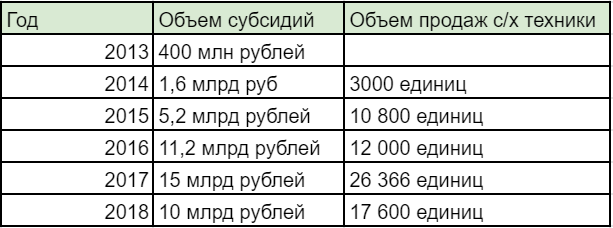
За время действия комплекса мер в отрасли в 3,3 раза выросли объёмы производства, экспорт увеличился в 2,6 раза, а численность занятых в сельхозмашиностроении рабочих выросла в 1,8 раза.
Май 2019 года
На 2019 год правительство выделело всего 8 млрд рублей субсидий, и к началу весны эти средства были фактически израсходованы. В апреле первый замминистра сельского хозяйства Джамбулат Хатуов обещал, что субсидия в том году составит 16 млрд руб. Но уже в конце мая правительство неожиданно приняло решение об отмене постановления.
«В середине года чиновник уровня замминистра сказал нам: работайте, ничего не меняется, торгуйте со скидкой», — рассказывал Константин Бабкин на пресс-конференции в Ростове-на-Дону. Чиновника он не назвал.
Решение российского правительства отменить постановление 1432 о субсидировании производителей сельхозтехники прозвучало как гром среди ясного неба и вызвало бурную реакцию всего агрорынка. Государство обещает, что предложенный взамен льготный лизинг будет более эффективным инструментом поддержки. Однако машиностроители в панике подсчитывают предстоящие убытки. Сельхозпроизводители тоже не верят обещаниям властей, готовятся к большим расходам на технику и усложнению получения льгот по новой схеме.
Производитель сельхозтехники «Ростсельмаш» остановливает производство с августа по октябрь, а после этого до февраля 2020 года будет работать в режиме трёхдневной рабочей недели.
«В своё время программа 1432 вытянула отечественное сельхозмашиностроение, помогла отрасли восстановиться, завоевать новые позиции, потеснить импорт, — говорит эксперт-аналитик “ФИНАМ” Алексей Калачёв. — Но это не значит, что отрасль будут бесконечно поддерживать из бюджета».
Как сообщала пресс-служба кабинета министров, изменения направлены на унификацию аналогичных по экономической сути мер поддержки спроса в разных отраслях, которые имеют разную эффективность и порождают конкуренцию за средства бюджета. Она же отмечала, что субсидирование производителей напрямую — схема, которая поддерживает чистую прибыль компаний, а финансирование через субсидирование косвенных инструментов (лизинг, кредиты) более эффективно и позволяет установить здоровую конкуренцию.
От ассоциации производителей специализированной техники и оборудования «Росспецмаш» направлено письмо председателю правительства РФ Дмитрию Медведеву с просьбой продолжить реализацию программы. Письмо подписали 70 человек из числа руководителей крупных производств сельхозтехники и дилеров.
«Бюджетная эффективность реализации Постановления №1432 в 2018 году составила 189% (на рубль выделенных субсидий приходится 1,89 рубля налогов). Отмена программы окажет существенное негативное влияние на развитие производства и обновление парка сельхозтехники в России. Экономические показатели заводов могут сократиться на десятки процентов из-за отмены этого постановления», — говорится в письме.
Декабрь 2019 года
Правительство в итоге выделяет субсидии в сумме 14,5 млрд рублей за 2019 год.
Активность покупателей и так затормозилась из-за неопределенностей с будущим «программы 1432» за последние полгода, а теперь и вовсе продажи не идут: субсидии по 2019 году закончились, лизинговые контракты уже исключены из проекта постановления о прямых субсидиях производителям на 2020 год, а единая лизинговая субсидия застряла в согласованиях. В связи с сезонностью аграрного бизнеса правительство рискует сорвать весенние полевые работы, поскольку без лизинговых контрактов многие аграрии просто не успеют купить сельхозтехнику, предупреждают участники рынка.
Программа №1432 продлена на 2020 год. Однако объём поддержки снизится в два раза — до 7 млрд рублей. При этом изменится и сам механизм поддержки.
«Насколько мы знаем, внедряется балльная система. Продукция будет ранжироваться по баллам, связанным с локализацией и наращиванием производства, — комментирует г-н Бабкин. — Это уже рискованное мероприятие, потому что загрузка предприятия и объёмы продаж зависят от многих параметров: от состояния рынка, тарифов на электричество. Обещать, что в следующем году мы произведём больше машин — это странно и неестественно. Но требование такое есть, поэтому те, кто пообещает больше, получат больше субсидий. Кто пообещает меньше — в конец очереди».
Несмотря на то, что прогноз по продажам техники на 2020 год делать в таких условиях сложно, Валерий Мальцев и Константин Бабкин пообещали, что производство техники останется на том же уровне, что и годом ранее, и все инвестиционные планы будут выполнены.
2020 год
Весной, когда началась пандемия, по решению российского правительства сельхозмашиностроение было признано системообразующей отраслью: предприятия АПК и сельхозмашиностроения не останавливали работу.
«Правительство России приняло очень важное решение: не распространило режим нерабочих дней на предприятия сельхозмашиностроения. Заводы не встали, не прекратили обеспечивать отрасль машинами, в которых она так нуждалась в начале посевного и кормозаготовительного сезонов. Не остановилась работа и в тот момент, когда зарубежные поставщики оборудования из-за пандемии приостановили поставки – предприятия сфокусировались на российских комплектующих. Сыграл свою роль и рост курсов резервных валют: российские машины стали более конкурентоспособны на внутреннем рынке».
В целом, по оценке совладельца «Ростсельмаша», объем реализации сельхозтехники в стране за восемь месяцев 2020-го года вырос примерно на 18% по сравнению с аналогичным периодом прошлого года. Основными причинами роста спроса на технику являются высокие цены на зерно, увеличение его экспорта, хорошая конъюнктура внешних рынков, и, конечно же, госпрограмма №1432 бюджет, которой уже подрос до 10 млрд. рублей.
«Во-первых, по итогам урожайного 2019 года сельхозорганизации получили неплохие прибыли и смогли расширить обновление парка техники. А во-вторых, государство продолжило поддержку сельскохозяйственного машиностроения. Импорт сельскохозяйственной техники существенно сократился».
Леонид Хазанов, независимый промышленный эксперт, кандидат экономических наук

2021 и дальше
В ходе рабочего визита в Ростов-на-Дону в 2020 году председатель правительства РФ Михаил Мишустин заявил, что государственная программа субсидирования производителей сельскохозяйственной техники в 2021 году будет расширена.
«Мы договорились о том, как эту программу не просто продолжить, а расширить. И, без сомнения, ваше предприятие продолжит получать соответствующие субсидии», — сказал премьер.
В проекте федерального бюджета на 2021 год и плановый период 2022-2023 года на эту программу также закладывается по 10 млрд рублей ежегодно.

Ранее Константин Бабкин писал в своем блоге, что государственная поддержка позволила компенсировать те сложные условия для развития производства сельхозтехники в России, которые существовали и существуют в нашей стране: дорогие кредиты, высокие налоги, постоянно растущая стоимость тарифов, большие расходы на ведение отчетности и т. д. Благодаря субсидиям стало выгоднее выпускать сельхозтехнику в России, чем за рубежом.
Он пояснил, что потенциал роста у сельского хозяйства очень большой. «30 млн гектар земли в России заброшено, выведено из оборота. В целом в России можно и нужно бы увеличить объемы производства зерна раза в два и нарастить объем производства другой сельхозпродукции. Мы говорим, что в этом году рост в сельском хозяйстве, но это рост, который должен продолжаться долго, его надо усиливать, поддерживать и наращивать», — подчеркнул Бабкин.
Показать полностью
9
2
Роботы-ликвидаторы в Чернобыле 3
Для работ на ЧАЭС были направлены сотни единиц дорожных и строительных машин (бульдозеры, бетоновозы, скреперы, грейдеры, автокраны и т.д.), а также специальной техники инженерных войск. Многие из них были роботизированы и имели дистанционное управление.
Часть 1: Роботы-ликвидаторы в Чернобыле
Часть 2: Роботы-ликвидаторы в Чернобыле 2

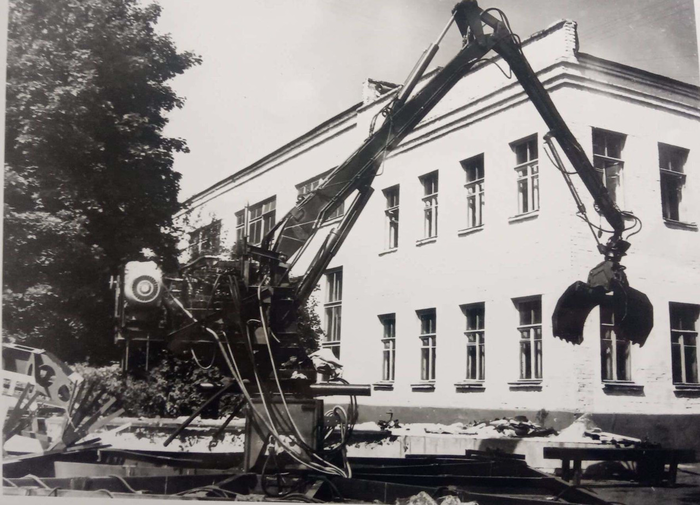
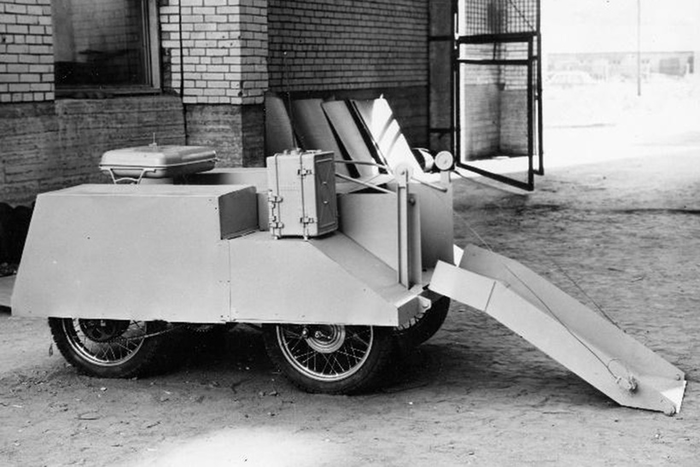
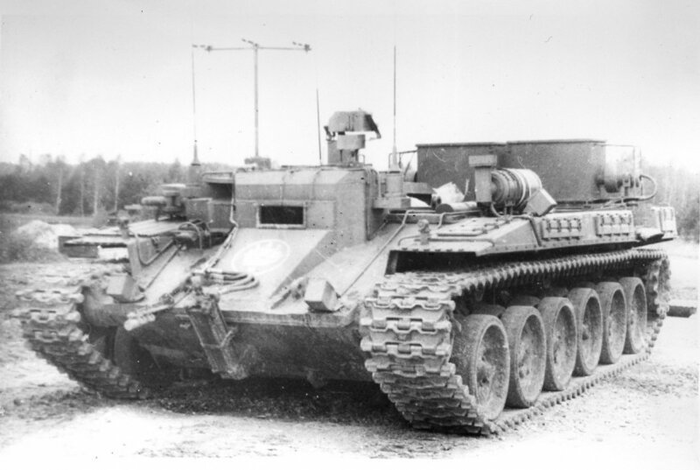
НИКИМТ ИМР-2Д «Динозавр»
Определяющую роль для разбора радиоактивных завалов вокруг 4-го блока сыграли инженерные машины разграждения (чаще всего – ИМР и ИМР-2). В Чернобыле их называли «Динозаврами» из-за внешнего сходства. Они были оснащены бульдозерным и крановым оборудованием и имели телескопическую стрелу с захватом-манипулятором. Они использовались для разгребания завалов, снесения построек, покрытия территории слоем песка, гравия и др.
О роботизированном комплексе «Клин-1» ВНИИТрансмаш на базе ИМР рассказывал тут: Роботы-ликвидаторы в Чернобыле

Машина была разработана на базе танка Т-72А и серийно выпускалась ПО «Уралвагонзавод» в городе Нижний Тагил. Ее основное назначение – помощь в продвижении войсковых колонн по территории, подвергшейся применению ядерного оружия.
Начало мая 1986
Разбросанные взрывом радиоактивные обломки сгребались и загружались ими в металлические контейнеры, затем контейнеры захватом-манипулятором устанавливали на бронетранспортеры.
Почти сразу же выяснилось, что для работы в специфических условиях локальной зоны 4-го блока ИМР имеет ряд существенных недостатков. Ее конструкция предусматривала защиту от радиоактивных источников, расположенных на земле. У разрушенного блока излучение падало на ИМР и с боков, и сверху. Управление механизмами машины осуществлялось визуально, что приводило к облучению оператора.
Когда случилась авария на ЧАЭС в 1986 году, Научно-исследовательский и конструкторский институт монтажной технологии (НИКИМТ) уже располагал не только практическим опытом ликвидации различных аварийных ситуаций на ядерных объектах (в том числе ликвидации последствий радиационных аварий на ПО «Маяк» 29.09.1957 в Челябинске-40), но и большим научно-производственным потенциалом.
Май 1986
НИКИМТ было поручено срочно доработать ИМР-2. Силами инженеров по мере выявления недостатков ИМР шла ее модернизация, которая выполнялась буквально за считанные дни. На
Опытном заводе НИКИМТ была создана модификация ИМР-2Д.
3 июня 1986
Машина ИМР-2Д доставлена в Чернобыль.
Основные доработки:
- усиленная защита от радиации (коэффициент ослабления до 1000),
- возможность наблюдения за движением и действиями механизмов с помощью телекамер,
- оснащение системами тонкой очистки воздуха от радиоактивных аэрозолей на базе системы фильтрации воздуха от Т-80 и т.п.

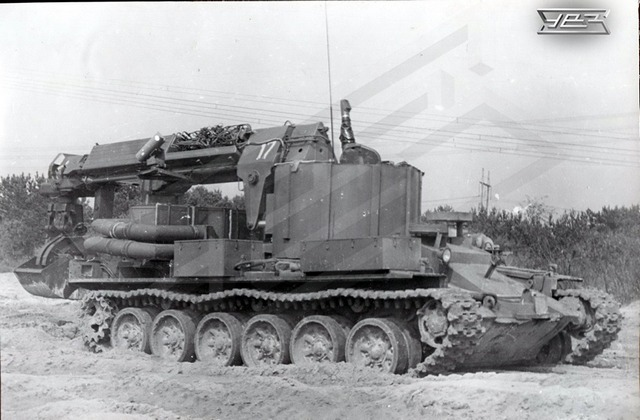
Общий вес машины ИМР-2Д составил 57 тонн за счет 13 тонн свинцовой защиты и дополнительного оборудования. Данные машины, активно искользовались в качестве пункта управления для другой техники, оснащенной радиоуправлением: на видео ниже из ИМР управляют тракторами ДЭТ-250 и ПДМ Sandvik Tamrock TORO 400
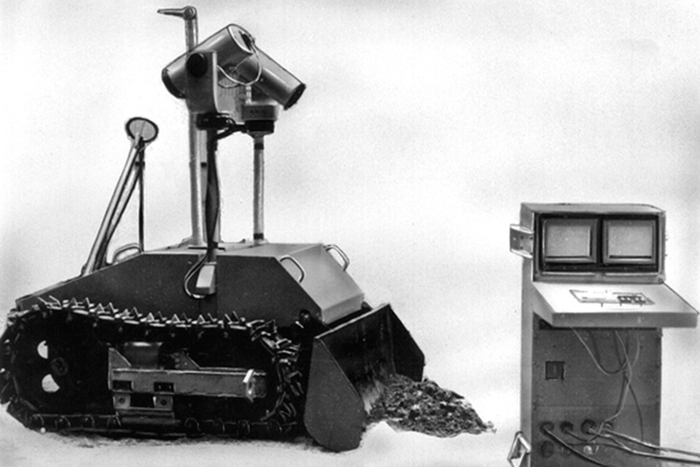
НПО «Сибцветметавтоматика» Робот-бульдозер ДЭТ-250
Накануне 9 мая 1986 года, генеральный директор красноярского НПО «Сибцветметавтоматика» М.Е. Царегородцев, принимал в гостях соседа, полковника КГБ. Мужчины сели за стол, поговорить и отметить годовщину Победы в Великой Отечественной войне. В этот момент раздался звонок, в комнату вошла супруга Михаила Егоровича.
— Миша, Москва на проводе.
Царегородцев быстро подошел к телефону. Первым заговорил начальник главка, которому подчинялось НПО «Сибцветметавтоматика».
— Ты про беду нашу слышал?
— Краем уха, — ответил Михаил Егорович.
— Что у тебя есть готового?
Два бульдозера. Один опытный, второй в Балее, на складе. К разговору подключился заместитель председателя Совета министров СССР Борис Евдокимович Щербина. Он был немногословен.
— Тебе даются чрезвычайные полномочия. Любые твои пожелания будут выполнены.
1970-е
«Сибцветметавтоматика» вела разработку радиоуправляемых бульдозеров ДЭТ-250 Челябинского тракторного завода. По каким-то причинам, после первых испытаний работы были прекращены, а документация в весьма сыром виде направлена в архив.

1983
По заказу «Забайкалзолота» работа возобновилась. Фактически пришлось заново формировать команду инженеров-разработчиков. Часть аппаратуры была изготовлена по имеющимся документам, часть пришлось разрабатывать вновь. Первый бульдозер ДЭТ-250 на радиоуправлении был испытан в деревне Хмелево летом 1983 года. Бульдозер был сдан заказчикам, документация ушла в архив и работы прекратились в очередной раз.
Май 1986
Столичное руководство дало Михаилу Царегородцеву распоряжение в сжатые сроки подготовить 10–12 бульдозеров, оснащенных системой радиоуправления. Такая техника требовалась для работы на ЧАЭС, в районах с высоким уровнем радиации. Вот эти разработки и легли в основу правительственного задания.
Радиоуправляемые бульдозеры ДЭТ-250 были направлены на расчистку завалов и строительство дорог к разрушенному энергоблоку, работы по созданию фундамента под Саркофаг. На этом участке были задействованы 7 бульдозеров, остальные распределены по соседним участкам.

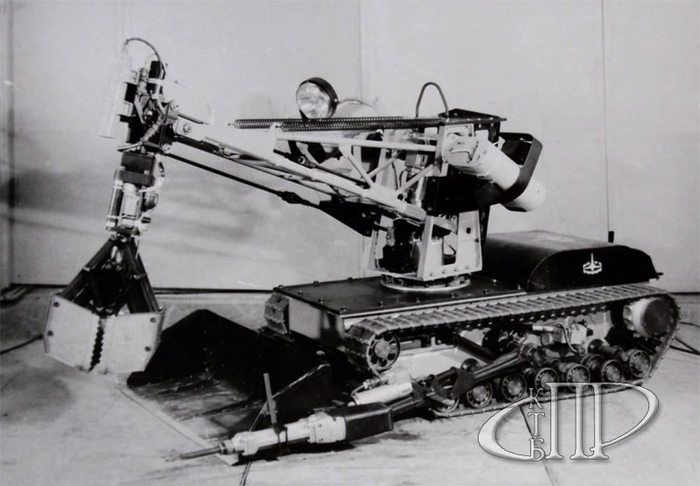
НИКИМТ Робот на основе Foresteri
Лето 1986
Поставлена задача разработать управляемого дистанционно робота на основе манипулятора грейферного погрузчика финского производства Foresteri. Для очистки кровли 4-го блока от радиоактивного мусора необходимо было оснастить его опорой с распределенным давлением на крышу, автономной гидравлической станцией и рабочим органом, а также дистанционным управлением и телевизионной системой наблюдения.
Мной было предложено оснастить робот шагающим приводом, чтобы он мог автономно передвигаться по крыше, но из-за жестких сроков мое предложение было отклонено, что сыграло впоследствии негативную роль
Вячеслав Павлович Соболин, ликвидатор, начальник группы отдел №46 НИКИМТ
Август 1986
2 робота на основе манипулятора Foresteri доставлены в Чернобыль. Но применение роботов было отложено.
Все уповали на работу автоматической зарубежной техники, которая, как оказалось, в тех условиях радиоактивности показала себя не особенно надежной
Вячеслав Павлович Соболин, ликвидатор, начальник группы отдел №46 НИКИМТ
Декабрь 1986
Когда робот потребовался для очистки крыши, оказалось, что во время транспортировки на ЧАЭС роботы были повреждены, нахождение на складе в течение 5 месяцев также негативно сказалось на состоянии робота.
Февраль 1987
Прикомандированы сотрудники НИКИМТ для починки механизмов робота. Через неделю один из роботов был установлен на крышу одного из зданий для сдирания настила кровли нашпигованного кусками радиоактивного топлива и другого мусора, который вплавился в рубероид. За один день дистанционного управления роботом удалось очистить 100 кв. метров крыши.
И вот встал вопрос о перемещении робота на новое место. Сам он двигаться не мог, здесь бы пригодился автономный ход. Кран Demag способный его переместить был нарасхват, выбить его было очень сложно. Во время перемещения необходимо было выходить на чердак и через окно по рации координировать крановщика.
Март 1987
Роботами на основе манипулятора Foresteri очищено 700 кв. метров крыш различных зданий.
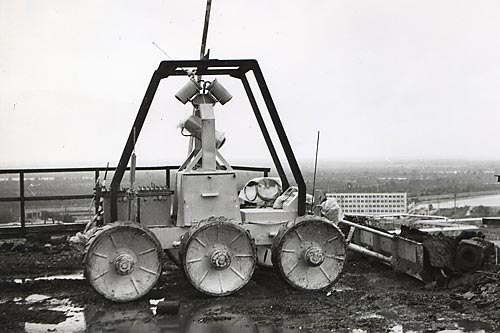
Робот-бульдозер Komatsu D155W
Подводный бескабинный бульдозер, созданный японской Komatsu в 1969 году, до сих пор используется при сооружении портовых причалов, благоустройстве водохранилищ, укреплении береговой полосы и других подобных работах, когда строительная площадка находится на глубине 7 м. Вертикальная труба в центре машины -- это шноркель, по которому воздух поступает к двигателю и вторая труба — для выпуска выхлопных газов. На машинах в Чернобыле шноркель демонтирован за ненадобностью. Управляется этот бульдозер дистанционно, так как в мутной воде толку от водителя в кабине будет не много.

На данный момент произведено всего 36 подобных бульдозеров, в строю остались всего 5, все они принадлежат Komatsu. Ещё один компания собрала для ускорения восстановительных работ в Японии после Великого восточно-японского землетрясения в 2011.
В Чернобыле D155W применялись для уборки высокорадиоактивного "мусора" на территории ЧАЭС, а также участвовали в ликвидации Рыжего Леса. Из-за отсутствия какой-либо защиты от радиации регулярно терял управление на территории, непосредственно прилегающей к АЭС.

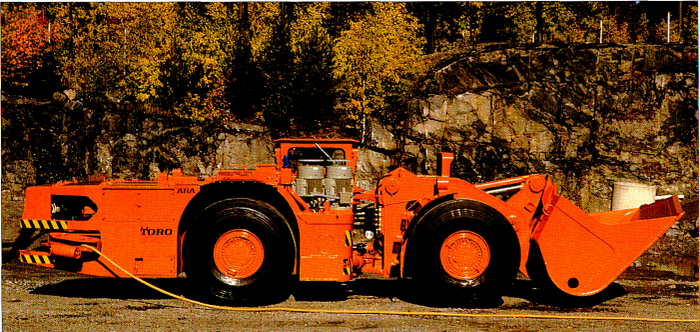
Самоходная погрузочно-доставочная машина Sandvik Tamrock TORO 400
Управление финскими роботом-ПДМ осуществлялось из ИМР. Системы радиоуправления были экранированы свинцом. Четырехколесное двузвенное шасси, шеститонный ковш-отвал, может тянуть/толкать 5 тонн. Выполнял земельные и дорожные работы, расчищал завалы. Стандартный двигатель TORO 400 с электроприводом - электродвигатель трехфазный, с короткозамкнутым ротором мощностью 110 кВт
Дистанционно-управляемые краны и бетононасосы
1987
На объекте появились три автокрана немецкого концерна Liebherr со 110-метровой стрелой и компьютерным управлением. Они предназначались для строительства Игналинской АЭС в Литве, но судьба распорядилась иначе. Коллега писал тут: Техника Чернобыля. Краны.
При строительстве Саркофага использовались иностранные бетононасосы фирм Worthington, Putzmeister и Schwing. Их основная задача — подача бетона под давлением на определённую высоту. Все бетононасосы были оборудованы пультами дистанционного управления и видеокамерами для дистанционного управления. Коллега подробно рассказывал тут: Техника Чернобыля. Бетононасосы.
Основные источники:
https://www.veteranrosatom.ru/chernobyl/chernobyl_1239.html
http://memory.biblioatom.ru/persona/kozlova_e_a/abv/
Козлова Е. А. "Схватка с неизвестностью", 2011
Козлова Е. А. "Неизвестные герои советской эпохи", 2006
А. Боровой, Е.П. Велихов. Опыт Чернобыля (работы на объекте «Укрытие»), 2012
https://museum.spbstu.ru/news/chernobyl/
https://carakoom.com/blog/unikalnyj-podvodnyj-buldozer-komat...
Видео:
Показать полностью
10
6
Роботы-ликвидаторы в Чернобыле 2
Хронология с конца лета 1986 года с уникальными видеокадрами работы роботов-ликвидаторов и комментариями ликвидаторов, руководителей КБ и НИИ.
Первая часть: Роботы-ликвидаторы в Чернобыле
Август 1986
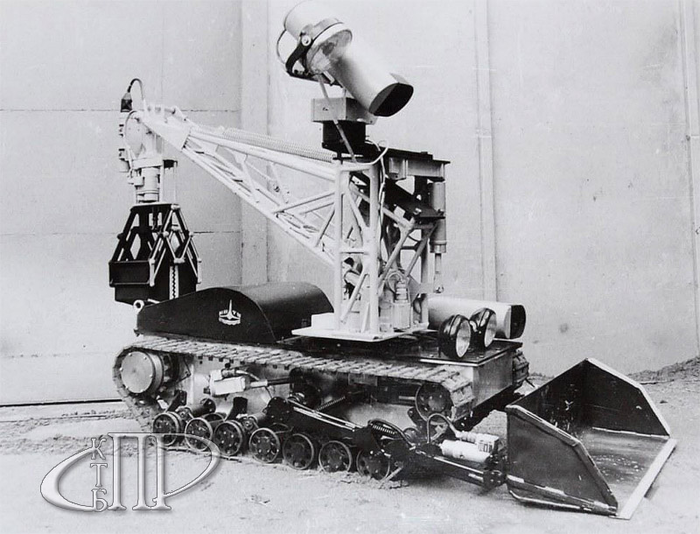
ЦНИИ РТК ТР-Г1 "Федя" и "Вася"
Гусеничных робота ТР-Г1 (на фото выше) на двигателях внутреннего сгорания было два экземпляра. Чтобы их различать, обслуживающий персонал электросваркой на плоскости ковша робота сделал соответствующие надписи — «Вася» и «Федя» . Одного из них — гусеничного робота «Васю», который заглох на крыше, пришлось столкнуть в развал (тогда «саркофаг» только начал сооружаться).
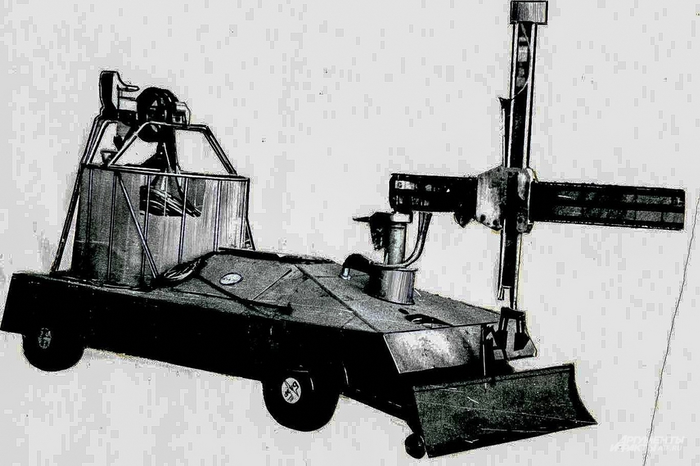
ЦНИИ РТК ТР-Б1
«При создании роботов для работы на ЧАЭС выручил разработанный нами модульный принцип построения роботов, – рассказывает руководитель ЦНИИ РТК Е.И. Юревич. – Именно он позволил в течение двух месяцев разработать, изготовить и поставить на ЧАЭС более 15 различных роботов, собранных из ранее отработанных унифицированных модулей.
У появившегося затем ТР-Б1 аккумуляторы сменил бензиновый генератор с баком на 15 л, который обеспечивал до восьми часов автономной работы. Управлялся он уже по радио.

Модульный принцип построения позволял менять рабочий инструмент робота. Здесь представлен вариант с бульдозерным отвалом:

Модификация тяжелого радиоуправляемого робота ТР-Б1, укомплектованного манипулятором с дисковой пилой. Он использовался для резки рубероидного покрытия крыши.
Модификация c навесным рабочим инструментом:
Видеомагнитафоны
Сборка и вся работа роботов документировалась с помощью миниатюрных телекамер. Для этого были необходимы видеомагнитофоны. А в то время в СССР только появились первые японские образцы этой техники и одному из заводов в Пскове было дано задание срочно воспроизвести эти устройства. Я поехал на этот завод и договорился об изготовлении 10 опытных образцов. И нам сделали эти первые советские видеомагнитофоны. Они исправно отработали в Чернобыле и остались там вместе с роботами.
Руководитель ЦНИИ РТК Евгений Иванович Юревич
ЦНИИ РТК ТР-Г2 "Антошка"
Прибыли два робота-бульдозер ЦНИИ РТК -- ТР-Г2 "Антошка" и "Вовочка". ТР-Г2 -- маленький бульдозер с электроприводом и кабелеукладчиком. Оборудован был камерой обзора КТП-67 и фарой освещения. Чтобы защитить микросхемы и электроприборы, которыми был оборудован ТР-Г2, все блоки поместили внутрь массивного свинцового цилиндра. Это несколько нарушило баланс и развесовку, привело к снижению скорости, но положительно сказалось на проходимости и сцеплении с поверхностью. Он использовался при расчистке так называемых иловых полей — сильно загрязненных участков в провале взорвавшегося энергоблока. На счету «Антошки» более 600 квадратных метров заиленной территории, не считая работ на кровле.


Роботы-бульдозеры ЦНИИ РТК занимались очисткой кровли, сдирая с них все рубероидное покрытие, так как со временем оно стало радиоактивным. Радиоактивный фон снизился в несколько раз, на кровлю отправляют солдат-резервистов. На трубу послали солдат с лопатами, топорами и ломами. Солдаты, очищая кровлю, сбрасывали с нее радиоактивный мусор на нижерасположенную крышу, по которой имелся доступ к провалу четвертого блока, а роботы-бульдозеры ЦНИИ РТК – сгребали этот мусор и сбрасывали в провал.
Происходило это так: боец, одетый в специальное защитное обмундирование, бежал по заранее намеченному маршруту к очередному куску. Штыковой лопатой делал вокруг него два-три надреза и со всех ног несся обратно. Затем бежал второй солдат, чтобы выполнить еще пару надрезов. Далее двое бойцов помещали фрагмент в полиэтиленовый мешок. Следующий кусок убирали уже другие солдаты. А те, что отработали на крыше положенные им секунды, спускались вниз, снимали там всю одежду. Она подлежала утилизации, ведь загрязнилась радиацией. Эти вещи тоже упаковывали в полиэтиленовые мешки. Солдаты мылись, переодевались во все новое.
Полковник в отставке Виктор Инюшин
ПО «СПЕЦАТОМ» Гусенечный грузовик
Грузовичок был разработан и изготовлен группой инженеров робототехники из Ленинграда и опытного завода ПО «СПЕЦАТОМ». На стандартной раме с гусеничным электроприводом был изготовлен кузов самосвала и кабелеукладчик. Использовался в машинном зале 4 блока, в высоких полях для вывоза контейнеров с радиоактивными отходами для дальнейшего захоронения на ПЗРО «Подлесный». Погрузку отходов осуществлял финский гидравлический грейферный погрузчик Foresteri.


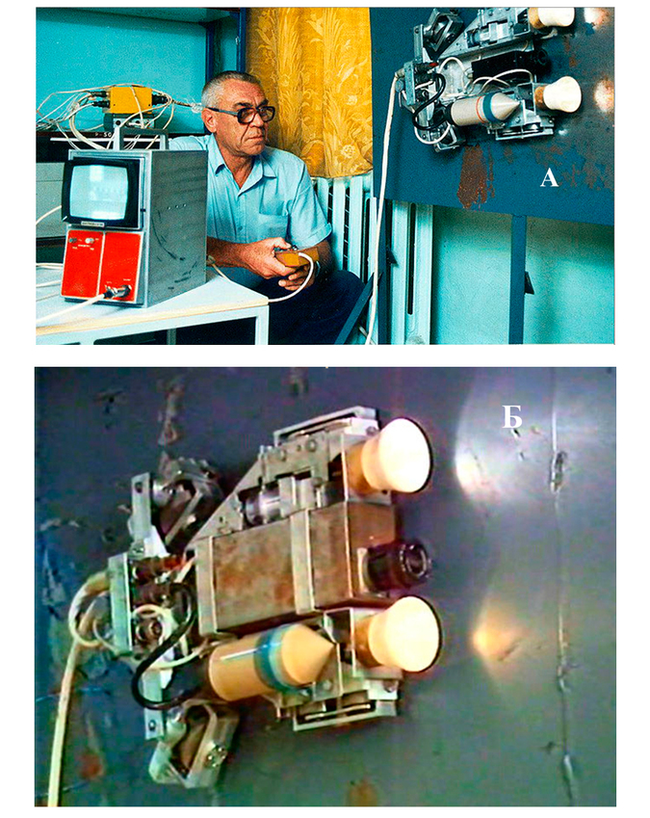
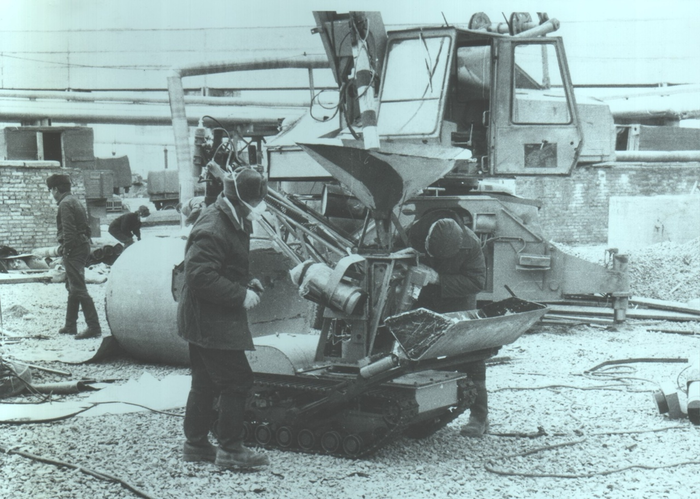
Вторая попытка MF-3 (ФРГ)
Немецкий робот MF-3 был доработан силами советских инженеров на предприятии «Белоярскатомэнергоремонт» (БАЭР): ранее установленные видеокамеры фирмы «Grundig» вышли из строя и порядком «светили», электроника не выдержала высоких радиоактивных полей. После переоборудования были установлены две отечественные видеокамеры КТП – 67. Летом были проведены ходовые испытания на промышленной площадке, были обнаружены частицы топлива, которые разлетелись, при взрыве на блоке. Манипулятором их собрали в контейнер и отправили на захоронение. Закрепили на конечном звене манипулятора совковую лопату и вновь подняли на кровлю. Однако в тот же день кабель был порван, оператор, видимо, потерял его из вида при маневрировании.

31 августв 1986
МГТУ имени Н.Э.Баумана Мобот-Ч-ХВ
Приступил к работе первый робот МГТУ имени Н.Э.Баумана -- Мобот-Ч-ХВ. Аббревиатура названия означает следующее: слово Мобот – мобильный робот, буква «Ч» — означает Чернобыль, а ХВ – химические войска, гусеничный с подвижной рукой манипулятором и с грейферным ковшом. Оборудован передним ковшом- лопатой, с электрическим кабельным управлением, двумя камерами КТП-63, на поворотных устройствах. Использовался при расчистке кровли, промышленной площадки и удалению высокоактивных элементов с территории АЭС.
Коллективу инженеров удалось быстро создать робота благодаря уже имевшемуся опыту по созданию робототехнических средств. За три года до аварии на ЧАЭС, в 1983 году, ученые создали первый макет модели такого робота. По сути, работа над созданием робота для ЧАЭС послужила основой для создания целого конструкторско-технического бюро по мобильным роботам, которое существует и работает (разрабатывает роботы) и сегодня.

Начало сентября 1986
ЦНИИ РТК РР-Г2
Робот-разведчик РР-Г2 задействован для обследования обстановки непосредственно в районе провала 4-го энергоблока и на кровле 3-го энергоблока.
15 сентября 1986
При переносе вертолетом робота «Мобот-Ч-ХВ» с крыши на крышу сработал электрозамок и «Мобот-Ч-ХВ» разбился. В отчете о результатах применения «Мобот Ч-ХВ» по уборке с крыши 3-го блока радиоактивных обломков и мусора от разрушенного 4-го блока оказались успешными:
Очистка кровли
Зона «Н». Подбор радиоактивных кусков и мусора ковшом, манипулятором, транспортировка и сброс в развал 4-го блока.
Сброшено в 4-й блок 2,2 тонны радиоактивных продуктов очищено 150 м2 крыши. Радиационный фон понижен в 2...3 раза. Очистка кровли до 15.09.86 г
Правительственная комиссия поручила МВТУ им. Н.Э. Баумана срочно изготовить еще два комплекса «Мобот Ч-ХВ» для завершения работ на крыше 3-го энергоблока и в машинном зале.
Вторая половина сентября 1986
Спасательная операция MF-2 Joker
Немецкий робот MF-2, застявщий в первой части, все еще находится на крыше 4-го энергоблока.
MF-2 создал массу проблем: встал на пути, по которому бегали солдаты, сбрасывавшие продукты взрыва в 4-й реактор вручную, лопатами. На станции их звали «биороботами», недобрым словом поминая тех руководителей, кто еще в самом начале ликвидации последствий аварии пообещал, что на кровлях не будет людей, все сделают машины...
Начальник лаборатории ВНИИТрансмаш, доктор технических наук Михаил Маленков
Специально смонтированный сюжет спасения немецкого MF-2 Joker:
Солдаты-«партизаны» пробовали вытащить его из завала лебедкой с монтажно-тяговым механизмом «лягушка» (на видео), но она сломалась. Только через два дня его смогли зацепить краном парни из отряда дозиметрической разведки и снять на землю.
«Joker» больше не заработал. Электронный мозг не выдержал такой дозовой нагрузки. Доза в месте его выгрузки и работы составляла более 10000 бэр (100 Зв). Теперь он стал никому не нужным фонящим кусоком железа.
Сентябрь-октябрь 1986
БАЭР «Канатоходец»
Развал реактора необходимо было контролировать, ежедневно применялись вертолёты для сброса буев, позволяющих замерять данные. Вертолётчики сильно облучались. Группа Белоярского Атомэнергоремонта (БАЭР) Арнольда Георгиевича Шастина разработала устройство «Канатоход»: оно двигалось по канату, переброшенному ракетой над развалом четвертого реактора, доходило до точки и спускало на лебедке «корзину», оснащённую камерой и разными датчиками (измерение фона, температуры, отборы проб воздуха и пыли). На все уходило 15 минут, а кабеля для управления хватало на четыре хода (обычно кабель терял электроизоляцию от радиационного фона за два часа).
Устройство было готово, можно было обойтись без вертолётов, но возникла проблема. Научным центром процесса ликвидации последствий аварии являлся Курчатовский институт.
Его представитель, прибывший за место академика Легасова академик Евгений Велихов ответил: «Видите, на вертодроме буи лежат, они все с новой изоляцией». Я в ответ говорю, что мы пилотов вертолётов освободим и сможем отбирать пробы, в том числе и образцы на анализ. Он отвечает: «Достаточно той информации, которая есть». Так прошло две недели. Ко мне подходит заместитель Велихова: «Арнольд, он согласен, давайте. Что случилось? Да эта изоляция ещё хуже, чем старая!» Так мы пустили в ход нашего «канатоходца».
Арнольд Георгиевич Шастин
Другие разработки БАЭР
Группа инженеров Белоярского Атомэнергоремонта (БАЭР), разработала несколько типов других машин: робот «Пылесос» для дистанционного ведения работ по дезактивации поверхностей помещений и его облегчённый аналог «Урал» (на базе пылесосов «Урал»), автоматическую газорезку, самоходный модуль на магнитных двигателях и другие.
БАЭР Робот-магнитоход
Робот-магнитоход умел передвигаться по металлическим поверхностям благодаря мощным редкоземельным магнитам.
2 октября 1986
При обработке кровли клеевым раствором для сбора радиоактивной пыли и сокращения радиоактивного излучения от рубероида вертолет Ми-8 Владимира Воробьева задевает лопастями трос одного из кранов и терпит крушение вдоль стены третьего реактора в нескольких десятках метров от самого реактора.
А это уже было где-то в районе 17 часов, на закате, и мы заходили как раз против солнца, которое слепило. Там стояли три крана, мы еще с утра жаловались, что они мешают нам. Раньше на тросе крана висела рельса, а тут ее убрали, и остался один трос, а без рельса он уже не виден.
Я за Вовкой висел в ста метрах. Володька шел-шел, и тут вдруг — бах! Брызги лопастей, вертолет переворачивается — и вниз.
Это было над третьим реактором, еще повезло, что вертолет упал с высоты 100 метров не на реактор, уже заглушенный, а вдоль его стенки на землю. Если бы на реактор упал Ми-8 с полной заправкой, мало бы не показалось.
Командир другого Ми-8 Вячеслав Жиронкин
После катастрофы полеты над реакторами были запрещены, доставка роботов осуществлялась только башенными кранами.
Ноябрь 1986
Завершение строительства объекта «Укрытие» (он же «саркофаг»).
8 января 1987
МГТУ имени Н.Э.Баумана Мобот-Ч-ХВ-2
К работе приступают два робота МГТУ имени Н.Э.Баумана -- «Мобот Ч-ХВ-2».
Разработчики с учетом опыта эксплуатации «Мобот Ч-ХВ» существенно модернизировали комплекс и расширили выполняемые им функции:
- оснастили манипулятор сменным двупалым схватом;
- оснастили отбойным молотком, устанавливаемым вместо схвата или на фронтальном погрузчике;
- оснастили полуавтоматическим стыковочным устройством для снятия и установки робота на кровлю 3-го энергоблока;
- для увеличения силы тяги увеличили массу робота;
- увеличили грузоподъемность и зону обслуживания манипулятора и фронтального погрузчика;
- изменили конструкцию кабелеукладчика и место выхода кабеля из корпуса робота;
- усовершенствовали и дополнили систему управления, ввели систему акустической связи;
доработали пост управления.
Данные роботы обладали функциональностью и маневренностью совершенного нового уровня. Робот позволял выполнять сложные задачи без присутствия людей на крыше 3-го энергоблока, такие как: дробление графитовых блоков и бетонных обломков отбойным молотком, уборка и контейнирование оставшихся на крыше радиоактивных обломков, демонтаж стальной трубы, возведение опалубки по периметру крыши зоны “М” для бетонирования, размещение маяков в заданных точках крыши для определения высоты уровня заливаемого на кровлю бетона. По существу, с помощью роботов, впервые удалось выполнить весь перечень подготовительных работ перед бетонированием кровли без выхода на нее людей.

Зима 1987
В результате несогласованных действий персонала в зоне работ на кабель одного из роботов «Мобот-Ч-ХВ-2» была поставлена бетонная плита. Робот вышел из строя и связь с ним была потеряна. Во всех похожих ситуациях ранее, при застревании роботов или при переворачивании при наезде на препятствие, на кровлю приходилось выводить людей.Из акта правительственной комиссии о результатах работы роботов «Мобот-Ч-ХВ-2» на крыше «М» 3-го энергоблока ЧАЭС от 13 апреля 1987 года:
«…Данные работы проводились в период с 7 января по 10 апреля 1987 года. В результате уборки площадей кровли уровень фона по гамма-излучению уменьшался в 3-5 раза. Весь объем работ был выполнен без привлечения на вспомогательные операции личного состава, что полностью исключило необходимость вывода человека в зону с повышенной радиацией.
Выполнение указанного объема работ роботизированными комплексами «МОБОТ» позволило согласно проведенным расчетам исключить 800 человеко-выходов на крышу «М» 3-его энергоблока с получением предельно допустимых доз облучения для личного состава.
Из всех имеющихся в наличии робототехнических средств для работы на кровле «МОБОТ» МВТУ им. Н.Э.Баумана является наиболее совершенной системой и может быть использован как прототип для дальнейшей разработки подобных телеуправляемых роботизированных систем…»
Продолжение следует...
Источники:
http://sktbpr.ru/content/mrk-mobot-ch-hv-2
д/ф Чернобыль: Два цвета времени (мини–сериал 1986)
https://www.youtube.com/channel/UCCp7KjE8N-hWQafi6guCHTQ
Роботы Чернобыля, Михаил Буков https://www.litres.ru/mihail-bukov-27107697/roboty-chernobyl...
д/ф «Солдаты Чернобыля»: Саркофаг https://youtu.be/QvNTOE_A1xw
https://ural.aif.ru/society/science/pervoprohodcy_po_chernob...
https://spbvedomosti.ru/news/obshchestvo/po_krovle_poshel_nb...
https://www.forbes.ru/tehnologii-photogallery/377539-chernob...
https://fakty.ua/148096-zagryaznennye-radiaciej-novye-flanel...
Показать полностью
17
3
Роботы-ликвидаторы в Чернобыле
Старательно собрана полная хронология до конца лета 1986 года с уникальными видеокадрами работы роботов-ликвидаторов и комментариями ликвидаторов, руководителей НИИ, непосредственно участвовавших в разработке и эксплуатации.

26 апреля 1986
На 4-м энергоблоке Чернобыльской АЭС произошёл взрыв, который полностью разрушил реактор. Здание энергоблока частично обрушилось, в различных помещениях и на крыше начался пожар.
27 апреля 1986
Начальнику экспериментального цеха систем контроля Белоярской атомной электростанции (БАЭС) Арнольду Георгиевичу Шастину поступает указание немедленно вылетать в Западную Германию, принимать закупленных СССР роботов MF-2 и MF-3, а так же распоряжение срочно создавать свою технику для ликвидации аварии.
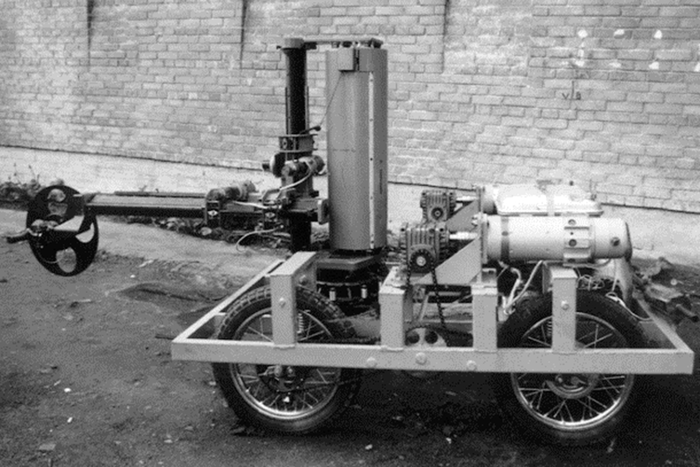
7 мая 1986
В Заречном началась работа по созданию робота «Белоярец». Для робота фактически не было никакого технического задания. Вся информация, имевшаяся на тот момент: на ЧАЭС произошёл радиоактивный выброс за пределы гермозоны (стен) энергоблока в окружающую среду, надо было срочно локализовать эту проблему и обезвредить всё во избежание распространения.
18 мая 1986
Главного конструктора самоходного шасси Лунохода-1 Александра Кемурджиана и первого заместителя директора Ленинградского ВНИИТрансмаш Эдуарда Потемкина срочно вызвали в Москву.
19 мая 1986
В Чернобыле состоялось совещание руководителей военно-промышленного комплекса, гражданской обороны, химических и инженерных войск. Главный вопрос: что можно сделать для скорейшей ликвидации последствий аварии с помощью техники?
Вот тут-то и прозвучали адресованные Кемурджиану слова: «У вас ведь есть луноход, который управляется дистанционно. Поставьте его на кровлю 3-го энергоблока, пусть разгребает без участия человека то, что навалило взрывом с соседнего 4-го». Кемурджиан возражал: «Это невозможно, луноход спроектирован для работы на Луне при силе тяжести в шесть раз меньшей, чем на Земле. У его тяговых электродвигателей не хватит мощности для уверенного движения в завалах!». «Ну что же, если луноход не годится, сделайте новую машину!» – последовала команда.
Май 1986
ВНИИТрансмаш приступает к разработке роботизированных комплексов «Клин-1» и «Клин-2».
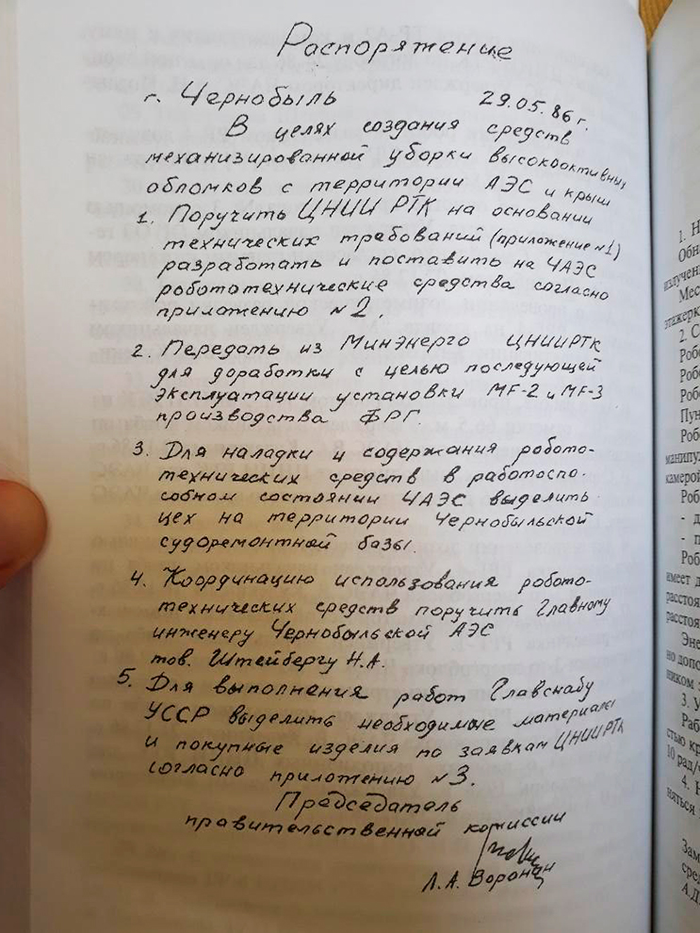
29 мая 1986
В Ленинградский ЦНИИ РТК пришло распоряжение в кратчайшие сроки – к 15 июня – разработать и поставить набор «робототехнических средств для механизированной уборки обломков с территории АЭС». Из-за спешки распоряжение председателя правительственной комиссии Льва Воронина, датированное 29 мая 1986 года, было написано от руки.
«Среди конструкторских бюро возникла конкуренция: все вдруг осознали, что тот, кто успешно справится с задачей ликвидации, получит средства на развитие этого направления и мощную государственную поддержку. Поэтому и другие организации захотели участвовать», — вспоминает Юревич.
10 июня 1986
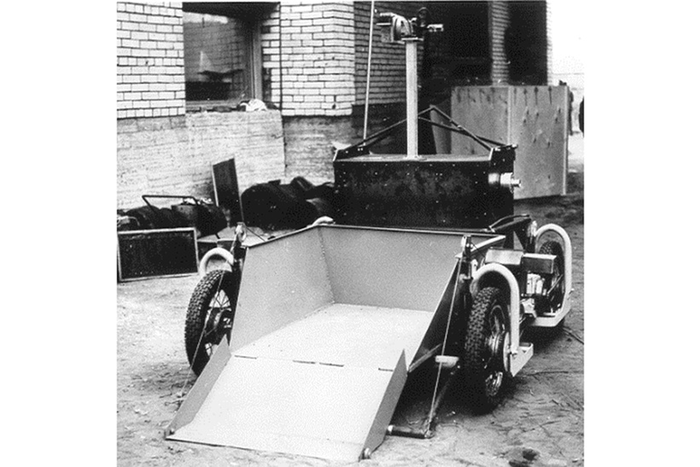
Робот «Белоярец» доставлен в Чернобыль. «Белоярец» – робот с бульдозерным ножом для расчистки кровли реактора и рукой для сбора и укладки в контейнеры графитовых блоков и других предметов, выброшенных из активной зоны реактора. Работа была срочная, поэтому в основу ходовой части робота лёг списанный электрокар от самолётного трапа, взятый из аэропорта Кольцово.
«Белоярец» первым из роботов был поднят краном (вертолётом не стали – очень тяжёлый) для удаления радиоактивности с кровли центрального зала блока №3, куда произошёл наибольший выброс из взорвавшегося реактора четвертого блока, и по сути начал основную работу по локализации выбросов радиоактивности от аварии в Чернобыле.
В общей сложности «Белоярец» проработал на ЧАЭС около месяца. В летний день на крыше плавился битум, образовались колеи. При попытке сделать поворот лопнула рулевая тяга. По разным причинам снова робота поднять для очистки кровли не смогли.
Июнь 1986
В МВТУ им. Н.Э. Баумана сводным коллективом двух факультетов («Специальное машиностроение» и «Конструкторско-механический») приступают к разработке робота «Мобот-Ч-ХВ».
17 июня 1986
В Чернобыль прибыл первый робот ЦНИИ РТК колесный разведчик РР-1, который производил замеры уровня радиации и снимал на камеру слишком опасные для людей участки.
За несколько дней робот обследовал машинный зал третьего энергоблока и коридор четвертого, работая в зонах, где радиация достигала 18 000 Р/ч. Управлялся и питался по кабелю.
Легкие роботы доставлялись на место вручную самими операторами. Однако на кровли, куда людям попасть было невозможно или чересчур опасно, их спускали вертолетами, в фанерных контейнерах, перенося второй конец управляющего кабеля на соседнюю крышу, где их принимали операторы из ЦНИИ РТК.
«Наиболее опасно было обследование одним из первых роботов-разведчиков бассейна-барботера, непосредственно под взорвавшимся энергоблоком, где мощность излучения достигала 15000 рентген в час, — вспоминал впоследствии Евгений Юревич. — Человек, заглянувший в этот ад, был обречен»
После нескольких заваливаний робота стало понятно, что конструкция робота слишком неустойчивая. В ЦНИИ РТК учли недостатки в новых моделях роботов-разведчиков.
27 июня 1986
На смену РР-1 прибыл колесный робот-разведчик РР-2
«По результатам этой разведки выяснилось, что данная технология использования роботов непригодна, — рассказали в РТК. — Основной объем первостепенных работ требовал очистки от радиоактивного мусора больших площадей, преимущественно на кровле»
Начало июля 1986
Робот-бульдозер ТР-А1 ЦНИИ РТК прибывает в Чернобыль. ТР-А1 — робот с навесным рабочим инструментом в виде бульдозерного ножа и ковша. В состав робота входили сканирующая телекамера, радиостанция (Р-407), кабель длиной 150 м, две аккумуляторные батареи (СЦ-300) со вторичным источником питания, блок управления и переносной пункт управления.
ТР-А1 использовался для работ на кровле деаэраторной этажерки. Это техническое помещение, непосредственно примыкающее к машинному залу АЭС, где расположено вспомогательное оборудование турбоагрегата — турбопитательный насос, конденсатные, дренажные и сетевые насосы, пароэжекторные установки, деаэраторы, кондиционеры, вентиляционное оборудование; позднее применялся для сбрасывания в провал 4-го энергоблока радиоактивного мусора с расположенных над ним кровель. В общей сложности машина проработала около 200 часов чистого времени
ТР-А1 сменил аналогичный робот ТР-А2, в конструкцию которого была введена рама для удобства транспортировки вертолетом и монтажа дождезащитной пленки.

8 июля 1986
Роботизированный комплекс «Клин-1» Ленинградского ВНИИТрансмаш доставлен в Чернобыль.

Комплекс "Клин-1" состоял из двух машин: машины робота «Объект 032» и машины управления «Объект 033». Машина-робот (Объект 032), занималась расчисткой завалов и сбором радиоактивных обломков и отходов. Создана на базе инженерной машины разграждения ИМР-2. Рабочим оборудованием машины были: отвал, комплект манипуляторов, аппаратура поиска высокоактивных источников излучения.
«Объект 032» был оборудован системой телевизионных передатчиков "Рутан-Д", позволяющей передавать изображение обстановки в зоне работ на машину управления. Управление роботом велось экипажем машины управления при помощи радиоканала связи. Максимальная допустимая удаленность робота от машины управления - 200м.
Машина управления «Объект 033» была создана для управления машиной-роботом, а также для разведки местности и эвакуации поломанной техники. В качестве основы для машины было взято шасси ИМР-2 (изделие 637). Экипаж машины - 2 человека.
Роботизированный комплекс "Клин-1" с успехом применялся на ЛПА, в частности, им были расчищены территория бывшей водородной станции 4 энергоблока ЧАЭС для площадки крана DEMAG. Комплексом «Клин-1» выполнялись работы по разборке завалов и очистке территории, перемещение зараженного грунта, загрузка контейнеров радиоактивными отходами и их транспортировка к местам захоронения, дозиметрическая и визуальная разведка территории.
Июль 1986
MF-2 «Джокер» робот с таким названием, срочно закупленный у ФРГ, прибыл в Чернобыльскую зону. Основной задачей «джокера» была работа в зоне М, самой опасной зоне на крыше вблизи разрушенного 4 реактора, где уровни радиации достигали более 10 тысяч рентген в час.

Манипулятор MF-2 не были рассчитан на такие дозы излучения и быстро вышел из строя. Если, например, «Белоярец» был собран вручную на электронных лампах, то у немецких радиоуправляемой машины MF-2 из-за мощного радиационного фона постоянно отказывала электроника. Однажды ночью он «сошел с ума»: начал движение без команды, заехал в груду строительной арматуры и обломков бетона, порвал себе гусеницы.
MF-3 производства Blocher-Motor GmbH & Co. KG, Метцинген, Западная Германия CMS Technologies в отличие от Джокера, MF-3 обладал меньшими габаритами, меньшим весом и был куда проворнее. Этот аппарат представляет собой 4-гусеничное транспортное средство с дистанционным или кабельным управлением. Сам робот предназначался для использования в ядерной промышленности и других опасных средах. Ввиду того, что машина управлялась при помощи пульта на кабельном управлении длина которого была всего лишь 100 метров, робот подвергал опасности жизнь оператора.

MF-3 был признан неэффективным в силу того, что он мог переносить только малый вес и делать это очень медленно.
Начало августа 1986
Гусеничный робот-разведчик РР-Г1 Ленинградского ЦНИИ РТК был создан для обследования мест, недоступных для колесных технических средств (РР-1, РР-2), включая лестницы и проходы. Использовался на кровле деаэраторной этажерки и для разведки проходов в районе кровли машинного зала.

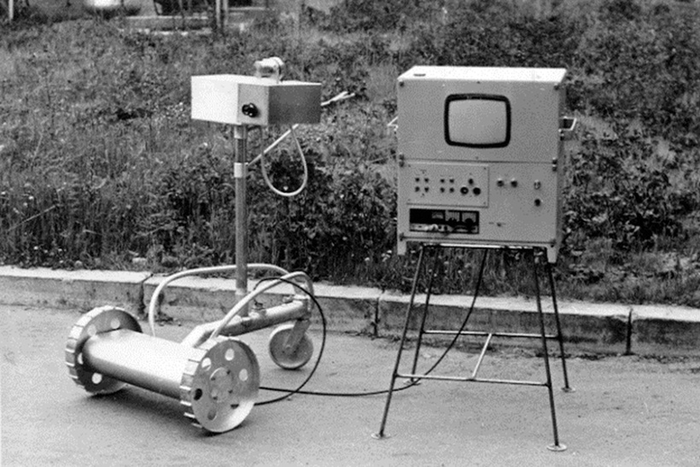
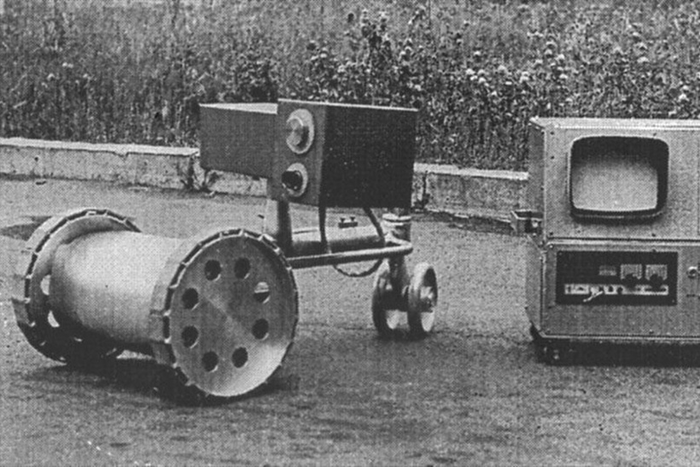
8 августа 1986
Прибытие специалистов в Чернобыль специалистов ВНИИТрансмаш и оборудования комплекса «Клин-2» в составе двух роботов СТР-1

Робот СТР-1 был создан из сплавов легких металлов (титан), состоял из самоходного шасси с приборами и оборудованием, обеспечивающим движение радиотехнического комплекса для дистанционного управления и бульдозерного отвала для дезактивации территории. Использовался для расчистки завалов радиоактивных материалов в зонах радиационного излучения, непригодных для длительной работы людей. При разработке комплекса был использован задел, накопленный в институте при проведении работ по луноходу и планетоходам.
20 августа 1986
Комплекс «Клин-2» (два робота СТР-1) развернули в зоне радиоактивного загрязнения. Управление роботом проводили по радиоканалу, что существенно упрощало использование робота на кровле ЧАЭС и снимало проблему обращения с кабелями, которые бы загрязнялись радиоактивными веществами, цеплялись за предметы и снижали маневренность робота. Радиоканал по большей части был стабилен, лишь в некоторых местах сбоил и оператору приходилось с пультом в руках подходить к роботу на короткое расстояние.
Недостатком СТР-1 было то, что аккумуляторные батареи из-за ионизации воздуха разряжались на 30% времени быстрее, а заряжались на 1,5-2 часа дольше запланированного времени.Два робота СТР-1 отработали на кровлях ЧАЭС более 200 часов, при этом было удалено с кровель более 90 тонн радиоактивных материалов, что позволило исключить привлечение к работам в опасных зонах более 1000 человек.
Август 1986
К месту аварии прибыли бульдозерные машины ТР-Г1 и ТР-Г2 ЦНИИ РТК, имевшие повышенную проходимость и предельную радиационную стойкость.
Полупроводники того времени не выдерживали крайних доз радиации, и на роботах ТР-Г все электронные схемы постарались перенести на пункт управления, соединенный с машинами кабелем. Все, что перенести не удалось, заменили надежными релейными схемами. Электродвигатели постоянного тока были заменены на асинхронные с короткозамкнутым ротором и электропитанием по силовому кабелю с пункта управления.
Вообще, с кабелями инженерам пришлось повозиться отдельно, и на последних поступивших на ЧАЭС роботах появились кабелеукладчики. Благодаря им трос все время оставался слегка натянутым, что исключало наезды на него и зацепления за препятствия.

Доставлять тяжелые машины на рабочие позиции было возможно лишь с помощью вертолетов, и тут снова пришлось потрудиться инженерам.
Они разработали для летчиков телевизионную систему с камерой, которая устанавливалась на тросе у замка крепления груза, и дисплеем в кабине пилота. Процесс напоминал парковку автомобиля с ориентацией на камеры заднего вида — с той разницей, что все происходило в небе над смертельно опасным реактором.
Продолжение следует...
Основные источники:
http://www.vniitransmash.ru/company/history.html
https://ru.wikipedia.org/wiki/Клин-1
https://zov-24.livejournal.com/50653.html
http://sktbpr.ru/content/mrk-mobot-ch-hv-2
https://pkitis.tltsu.ru/?p=1038
https://ural.aif.ru/society/science/pervoprohodcy_po_chernob...
https://www.forbes.ru/tehnologii/377515-o-kom-zabyli-v-seria...
https://rtc.ru/article/bremya-pervyh-kakie-roboty-ispolzoval...
https://spbvedomosti.ru/news/obshchestvo/po_krovle_poshel_nb...
Показать полностью
14
8
Промышленные роботы в России: отставание катастрофическое
Россия занимает одно из последних мест среди развитых и развивающихся стран по уровню оснащения промышленными роботами:
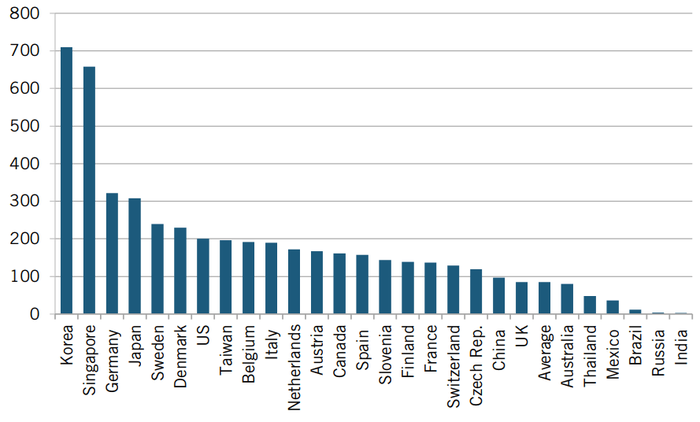
График 1. Количество трудоспособного населения и количество роботов в производстве на 10 тыс. этого трудоспособного населения (Исследование Information Technology & Innovation Foundation, 2018)
— Если говорить о производителях промышленных манипуляторов, то, к сожалению, таковых у нас пока нет: все российские продукты пока в процессе разработки и являются, по сути, стартапами, а не серийными продуктами, из-за чего не могут составить конкуренцию уже существующим мировым производителям. Отмечу, что работа ведется, и это меня очень радует! Надеюсь, что в скором будущем мы сможем предлагать нашим клиентам достойные роботизированные решения на основе отечественных роботов, и это будет новый этап в развитии робототехники в нашей стране.
Дмитрий Ипанов, генеральный директор «Вектор Групп» из интервью CNEWS
Показать полностью
1