


Роботы-ликвидаторы в Чернобыле
Старательно собрана полная хронология до конца лета 1986 года с уникальными видеокадрами работы роботов-ликвидаторов и комментариями ликвидаторов, руководителей НИИ, непосредственно участвовавших в разработке и эксплуатации.

26 апреля 1986
На 4-м энергоблоке Чернобыльской АЭС произошёл взрыв, который полностью разрушил реактор. Здание энергоблока частично обрушилось, в различных помещениях и на крыше начался пожар.
27 апреля 1986
Начальнику экспериментального цеха систем контроля Белоярской атомной электростанции (БАЭС) Арнольду Георгиевичу Шастину поступает указание немедленно вылетать в Западную Германию, принимать закупленных СССР роботов MF-2 и MF-3, а так же распоряжение срочно создавать свою технику для ликвидации аварии.
7 мая 1986
В Заречном началась работа по созданию робота «Белоярец». Для робота фактически не было никакого технического задания. Вся информация, имевшаяся на тот момент: на ЧАЭС произошёл радиоактивный выброс за пределы гермозоны (стен) энергоблока в окружающую среду, надо было срочно локализовать эту проблему и обезвредить всё во избежание распространения.
18 мая 1986
Главного конструктора самоходного шасси Лунохода-1 Александра Кемурджиана и первого заместителя директора Ленинградского ВНИИТрансмаш Эдуарда Потемкина срочно вызвали в Москву.
19 мая 1986
В Чернобыле состоялось совещание руководителей военно-промышленного комплекса, гражданской обороны, химических и инженерных войск. Главный вопрос: что можно сделать для скорейшей ликвидации последствий аварии с помощью техники?
Вот тут-то и прозвучали адресованные Кемурджиану слова: «У вас ведь есть луноход, который управляется дистанционно. Поставьте его на кровлю 3-го энергоблока, пусть разгребает без участия человека то, что навалило взрывом с соседнего 4-го». Кемурджиан возражал: «Это невозможно, луноход спроектирован для работы на Луне при силе тяжести в шесть раз меньшей, чем на Земле. У его тяговых электродвигателей не хватит мощности для уверенного движения в завалах!». «Ну что же, если луноход не годится, сделайте новую машину!» – последовала команда.
Май 1986
ВНИИТрансмаш приступает к разработке роботизированных комплексов «Клин-1» и «Клин-2».
29 мая 1986
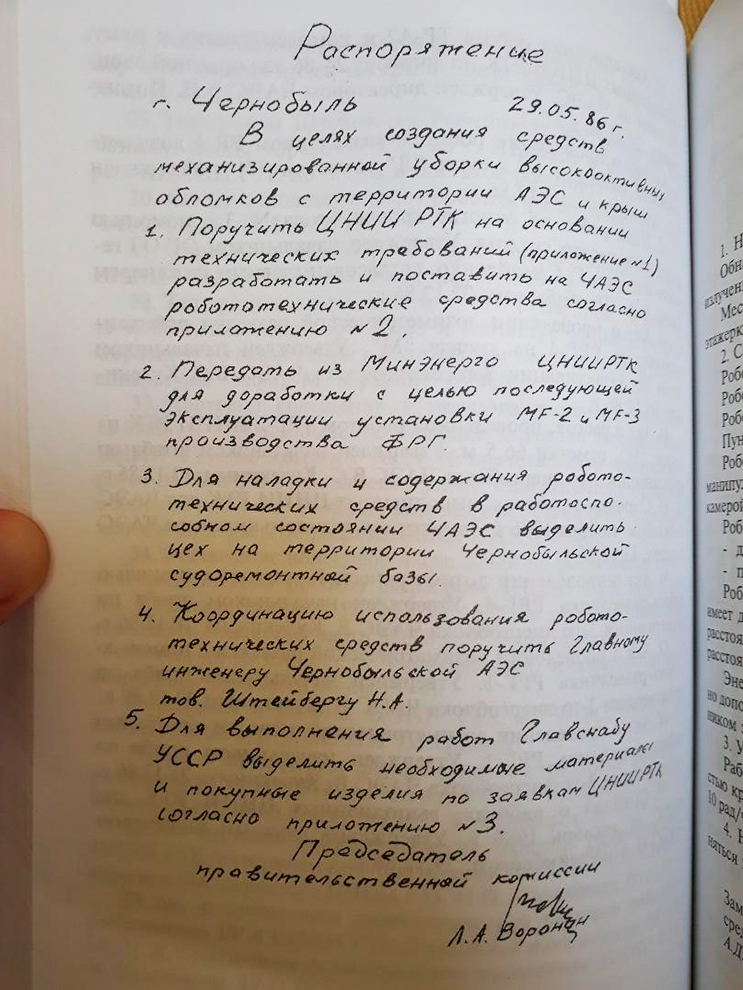
В Ленинградский ЦНИИ РТК пришло распоряжение в кратчайшие сроки – к 15 июня – разработать и поставить набор «робототехнических средств для механизированной уборки обломков с территории АЭС». Из-за спешки распоряжение председателя правительственной комиссии Льва Воронина, датированное 29 мая 1986 года, было написано от руки.
«Среди конструкторских бюро возникла конкуренция: все вдруг осознали, что тот, кто успешно справится с задачей ликвидации, получит средства на развитие этого направления и мощную государственную поддержку. Поэтому и другие организации захотели участвовать», — вспоминает Юревич.
10 июня 1986
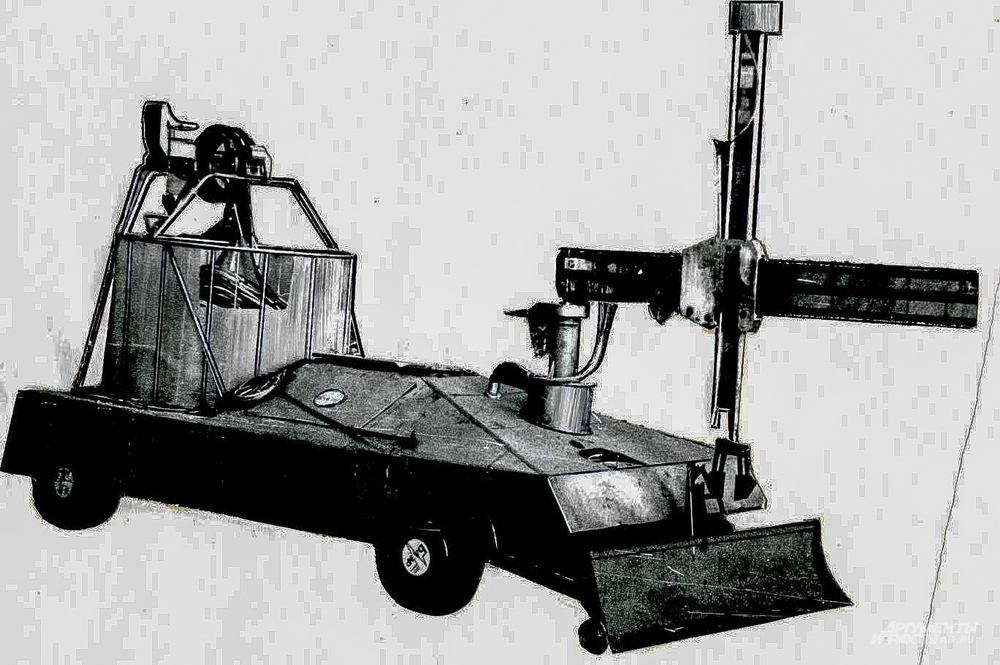
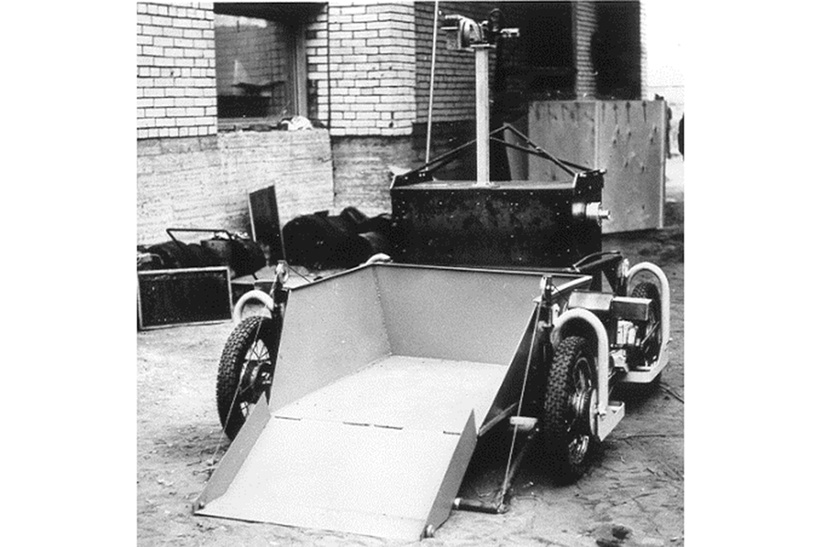
Робот «Белоярец» доставлен в Чернобыль. «Белоярец» – робот с бульдозерным ножом для расчистки кровли реактора и рукой для сбора и укладки в контейнеры графитовых блоков и других предметов, выброшенных из активной зоны реактора. Работа была срочная, поэтому в основу ходовой части робота лёг списанный электрокар от самолётного трапа, взятый из аэропорта Кольцово.
«Белоярец» первым из роботов был поднят краном (вертолётом не стали – очень тяжёлый) для удаления радиоактивности с кровли центрального зала блока №3, куда произошёл наибольший выброс из взорвавшегося реактора четвертого блока, и по сути начал основную работу по локализации выбросов радиоактивности от аварии в Чернобыле.
В общей сложности «Белоярец» проработал на ЧАЭС около месяца. В летний день на крыше плавился битум, образовались колеи. При попытке сделать поворот лопнула рулевая тяга. По разным причинам снова робота поднять для очистки кровли не смогли.
Июнь 1986
В МВТУ им. Н.Э. Баумана сводным коллективом двух факультетов («Специальное машиностроение» и «Конструкторско-механический») приступают к разработке робота «Мобот-Ч-ХВ».
17 июня 1986
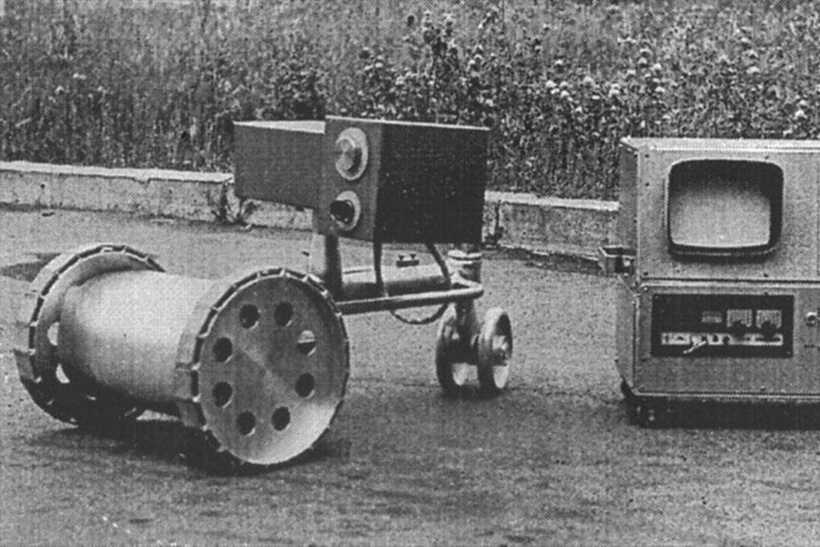
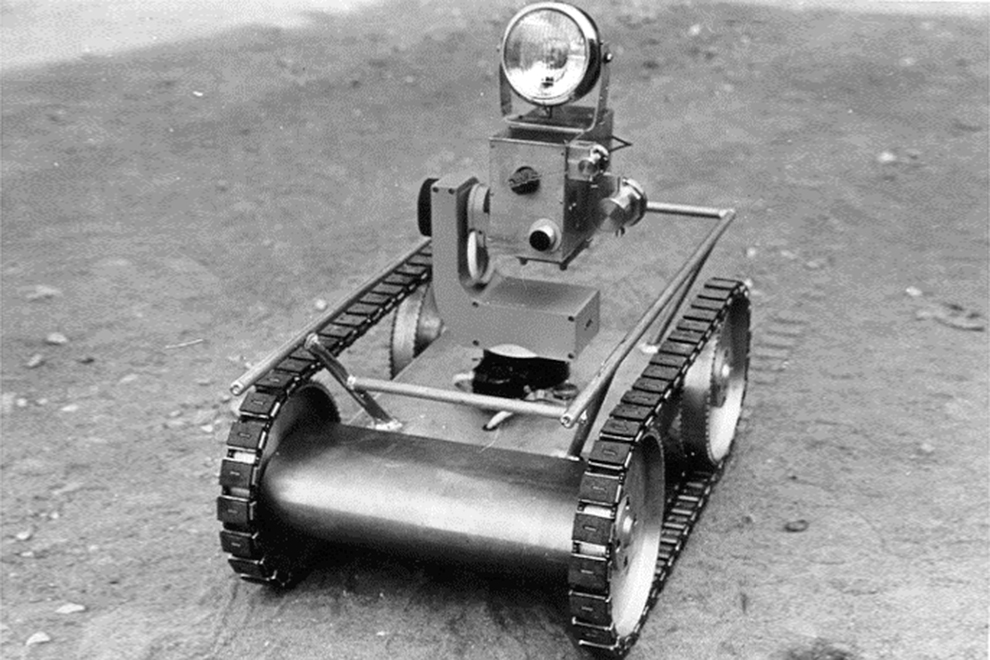
В Чернобыль прибыл первый робот ЦНИИ РТК колесный разведчик РР-1, который производил замеры уровня радиации и снимал на камеру слишком опасные для людей участки.
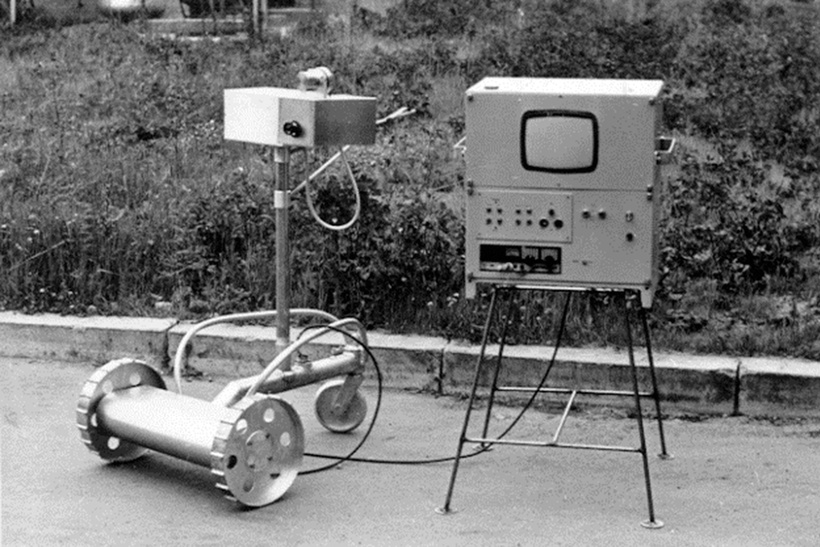
За несколько дней робот обследовал машинный зал третьего энергоблока и коридор четвертого, работая в зонах, где радиация достигала 18 000 Р/ч. Управлялся и питался по кабелю.
Легкие роботы доставлялись на место вручную самими операторами. Однако на кровли, куда людям попасть было невозможно или чересчур опасно, их спускали вертолетами, в фанерных контейнерах, перенося второй конец управляющего кабеля на соседнюю крышу, где их принимали операторы из ЦНИИ РТК.
«Наиболее опасно было обследование одним из первых роботов-разведчиков бассейна-барботера, непосредственно под взорвавшимся энергоблоком, где мощность излучения достигала 15000 рентген в час, — вспоминал впоследствии Евгений Юревич. — Человек, заглянувший в этот ад, был обречен»
После нескольких заваливаний робота стало понятно, что конструкция робота слишком неустойчивая. В ЦНИИ РТК учли недостатки в новых моделях роботов-разведчиков.
27 июня 1986
На смену РР-1 прибыл колесный робот-разведчик РР-2
«По результатам этой разведки выяснилось, что данная технология использования роботов непригодна, — рассказали в РТК. — Основной объем первостепенных работ требовал очистки от радиоактивного мусора больших площадей, преимущественно на кровле»
Начало июля 1986
Робот-бульдозер ТР-А1 ЦНИИ РТК прибывает в Чернобыль. ТР-А1 — робот с навесным рабочим инструментом в виде бульдозерного ножа и ковша. В состав робота входили сканирующая телекамера, радиостанция (Р-407), кабель длиной 150 м, две аккумуляторные батареи (СЦ-300) со вторичным источником питания, блок управления и переносной пункт управления.
ТР-А1 использовался для работ на кровле деаэраторной этажерки. Это техническое помещение, непосредственно примыкающее к машинному залу АЭС, где расположено вспомогательное оборудование турбоагрегата — турбопитательный насос, конденсатные, дренажные и сетевые насосы, пароэжекторные установки, деаэраторы, кондиционеры, вентиляционное оборудование; позднее применялся для сбрасывания в провал 4-го энергоблока радиоактивного мусора с расположенных над ним кровель. В общей сложности машина проработала около 200 часов чистого времени
ТР-А1 сменил аналогичный робот ТР-А2, в конструкцию которого была введена рама для удобства транспортировки вертолетом и монтажа дождезащитной пленки.

8 июля 1986
Роботизированный комплекс «Клин-1» Ленинградского ВНИИТрансмаш доставлен в Чернобыль.

Комплекс "Клин-1" состоял из двух машин: машины робота «Объект 032» и машины управления «Объект 033». Машина-робот (Объект 032), занималась расчисткой завалов и сбором радиоактивных обломков и отходов. Создана на базе инженерной машины разграждения ИМР-2. Рабочим оборудованием машины были: отвал, комплект манипуляторов, аппаратура поиска высокоактивных источников излучения.
«Объект 032» был оборудован системой телевизионных передатчиков "Рутан-Д", позволяющей передавать изображение обстановки в зоне работ на машину управления. Управление роботом велось экипажем машины управления при помощи радиоканала связи. Максимальная допустимая удаленность робота от машины управления - 200м.
Машина управления «Объект 033» была создана для управления машиной-роботом, а также для разведки местности и эвакуации поломанной техники. В качестве основы для машины было взято шасси ИМР-2 (изделие 637). Экипаж машины - 2 человека.
Роботизированный комплекс "Клин-1" с успехом применялся на ЛПА, в частности, им были расчищены территория бывшей водородной станции 4 энергоблока ЧАЭС для площадки крана DEMAG. Комплексом «Клин-1» выполнялись работы по разборке завалов и очистке территории, перемещение зараженного грунта, загрузка контейнеров радиоактивными отходами и их транспортировка к местам захоронения, дозиметрическая и визуальная разведка территории.

Июль 1986
MF-2 «Джокер» робот с таким названием, срочно закупленный у ФРГ, прибыл в Чернобыльскую зону. Основной задачей «джокера» была работа в зоне М, самой опасной зоне на крыше вблизи разрушенного 4 реактора, где уровни радиации достигали более 10 тысяч рентген в час.

Манипулятор MF-2 не были рассчитан на такие дозы излучения и быстро вышел из строя. Если, например, «Белоярец» был собран вручную на электронных лампах, то у немецких радиоуправляемой машины MF-2 из-за мощного радиационного фона постоянно отказывала электроника. Однажды ночью он «сошел с ума»: начал движение без команды, заехал в груду строительной арматуры и обломков бетона, порвал себе гусеницы.
MF-3 производства Blocher-Motor GmbH & Co. KG, Метцинген, Западная Германия CMS Technologies в отличие от Джокера, MF-3 обладал меньшими габаритами, меньшим весом и был куда проворнее. Этот аппарат представляет собой 4-гусеничное транспортное средство с дистанционным или кабельным управлением. Сам робот предназначался для использования в ядерной промышленности и других опасных средах. Ввиду того, что машина управлялась при помощи пульта на кабельном управлении длина которого была всего лишь 100 метров, робот подвергал опасности жизнь оператора.

MF-3 был признан неэффективным в силу того, что он мог переносить только малый вес и делать это очень медленно.
Начало августа 1986
Гусеничный робот-разведчик РР-Г1 Ленинградского ЦНИИ РТК был создан для обследования мест, недоступных для колесных технических средств (РР-1, РР-2), включая лестницы и проходы. Использовался на кровле деаэраторной этажерки и для разведки проходов в районе кровли машинного зала.
8 августа 1986
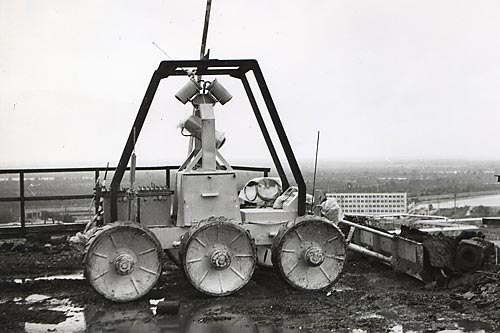
Прибытие специалистов в Чернобыль специалистов ВНИИТрансмаш и оборудования комплекса «Клин-2» в составе двух роботов СТР-1

Робот СТР-1 был создан из сплавов легких металлов (титан), состоял из самоходного шасси с приборами и оборудованием, обеспечивающим движение радиотехнического комплекса для дистанционного управления и бульдозерного отвала для дезактивации территории. Использовался для расчистки завалов радиоактивных материалов в зонах радиационного излучения, непригодных для длительной работы людей. При разработке комплекса был использован задел, накопленный в институте при проведении работ по луноходу и планетоходам.
20 августа 1986
Комплекс «Клин-2» (два робота СТР-1) развернули в зоне радиоактивного загрязнения. Управление роботом проводили по радиоканалу, что существенно упрощало использование робота на кровле ЧАЭС и снимало проблему обращения с кабелями, которые бы загрязнялись радиоактивными веществами, цеплялись за предметы и снижали маневренность робота. Радиоканал по большей части был стабилен, лишь в некоторых местах сбоил и оператору приходилось с пультом в руках подходить к роботу на короткое расстояние.
Недостатком СТР-1 было то, что аккумуляторные батареи из-за ионизации воздуха разряжались на 30% времени быстрее, а заряжались на 1,5-2 часа дольше запланированного времени.Два робота СТР-1 отработали на кровлях ЧАЭС более 200 часов, при этом было удалено с кровель более 90 тонн радиоактивных материалов, что позволило исключить привлечение к работам в опасных зонах более 1000 человек.
Август 1986
К месту аварии прибыли бульдозерные машины ТР-Г1 и ТР-Г2 ЦНИИ РТК, имевшие повышенную проходимость и предельную радиационную стойкость.
Полупроводники того времени не выдерживали крайних доз радиации, и на роботах ТР-Г все электронные схемы постарались перенести на пункт управления, соединенный с машинами кабелем. Все, что перенести не удалось, заменили надежными релейными схемами. Электродвигатели постоянного тока были заменены на асинхронные с короткозамкнутым ротором и электропитанием по силовому кабелю с пункта управления.
Вообще, с кабелями инженерам пришлось повозиться отдельно, и на последних поступивших на ЧАЭС роботах появились кабелеукладчики. Благодаря им трос все время оставался слегка натянутым, что исключало наезды на него и зацепления за препятствия.

Доставлять тяжелые машины на рабочие позиции было возможно лишь с помощью вертолетов, и тут снова пришлось потрудиться инженерам.
Они разработали для летчиков телевизионную систему с камерой, которая устанавливалась на тросе у замка крепления груза, и дисплеем в кабине пилота. Процесс напоминал парковку автомобиля с ориентацией на камеры заднего вида — с той разницей, что все происходило в небе над смертельно опасным реактором.
Продолжение следует...
Основные источники:
http://www.vniitransmash.ru/company/history.html
https://ru.wikipedia.org/wiki/Клин-1
https://zov-24.livejournal.com/50653.html
http://sktbpr.ru/content/mrk-mobot-ch-hv-2
https://pkitis.tltsu.ru/?p=1038
https://ural.aif.ru/society/science/pervoprohodcy_po_chernob...
https://www.forbes.ru/tehnologii/377515-o-kom-zabyli-v-seria...
https://rtc.ru/article/bremya-pervyh-kakie-roboty-ispolzoval...
https://spbvedomosti.ru/news/obshchestvo/po_krovle_poshel_nb...
Лига Новых Технологий
2K постов17K подписчика
Правила сообщества
Главное правило, это вести себя как цивилизованный человек!
Но теперь есть еще дополнительные правила!
1. Нельзя раскручивать свой сайт, любую другую соц сеть или мессенджер, указывая их как источник. Если данная разработка принадлежит вам, тогда можно.
2. Нельзя изменять заглавие или текст поста, как указано в источнике, таким образом чтобы разжигать конфликт.
3. Постите, пожалуйста, полный текст с источника, а не превью и ссылка.