Как я создал подводного робота в 10 раз дешевле
Варить цветное мыло я не научился, рисовать - тоже, ножи не изготавливаю, в общем, рассказать нечего.
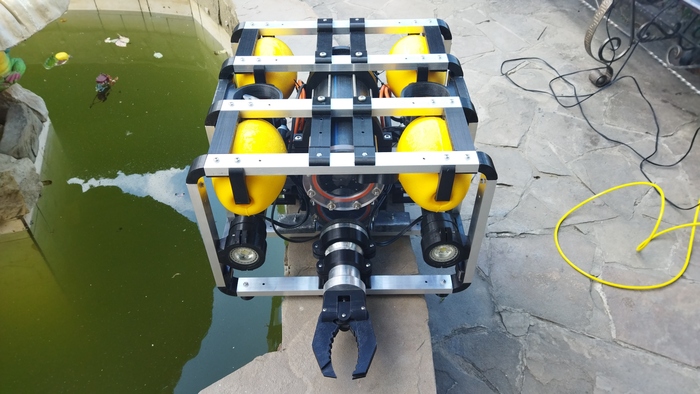
Пришлось сделать, что попроще - подводного дрона-робота, в узких кругах известного как ROV (Remote Operated Vehicle). Назвал Жорой. И это - ни разу не игрушка – глубина его погружения до 200 метров.
Если в недалеком прошлом для производства подобного устройства понадобились бы усилия целого конструкторского отдела и экспериментального цеха, то в наше время его можно изготовить самостоятельно. Для этого, помимо прямых рук и могучего интеллекта, понадобятся 3Д принтер, паяльник, программа для 3Д моделирования, и знакомство с китайскими товарищами с Алиэкспресс.
У многих возникает вопрос, а чем собственно подводный робот отличается от своего «воздушного» брата – квадрокоптера и почему первый стоит сильно дороже.
Проблема состоит в агрессивной водной среде, особенно если мы говорим о соленой морской воде, и тут два основных момента. Первый - герметичность корпуса, в котором размещается вся электроника для управления и видеокамеры. И второе - это моторы, которые, в большинстве случаев открыты для доступа воды, которая разрушает все узлы и подшипники мотора.
Интересный момент состоит в том, что практически никакие радиосигналы не распространяются в воде, следовательно, управление и передача видеосигнала происходит через кабель, который, помимо наличия самих жил-проводов, должен обладать нулевой или положительной плавучестью и быть очень крепким.

Сама идея создания подводного робота появилась давно, но только спустя три года стала готова полностью рабочая версия.
Первый вариант был сделан за несколько месяцев, но каждый раз при тестах появлялись недоработки и пожелания по улучшению. В итоге – это пятая итерация.
Знал бы я все сложности заранее, когда вписывался в это – даже не стал бы пытаться. Колумб говорил тоже самое, кстати.
Несмотря на наличие большого числа готовых изделий, было три основные вещи, которые подталкивали создать свой вариант: слишком большая цена хорошего аппарата с нужными характеристиками, отсутствие внятной поддержки в случае поломки устройства (владельцы даже дорогих аппаратов жаловались, что их невозможно отремонтировать вообще или же в разумный срок, а поломки часты из-за условий использования), и желание иметь возможность модификации. У меня всегда с собой запчасти, из которых можно собрать второй аппарат, и есть полное понимание, как все устроено и работает.
Первые испытания проводились в гидрокамере, и основные узлы выдержали давление, соответствующее 150 метрам, но, полагаю, есть запас. Теперь робот плавает в море и набирается опыта.
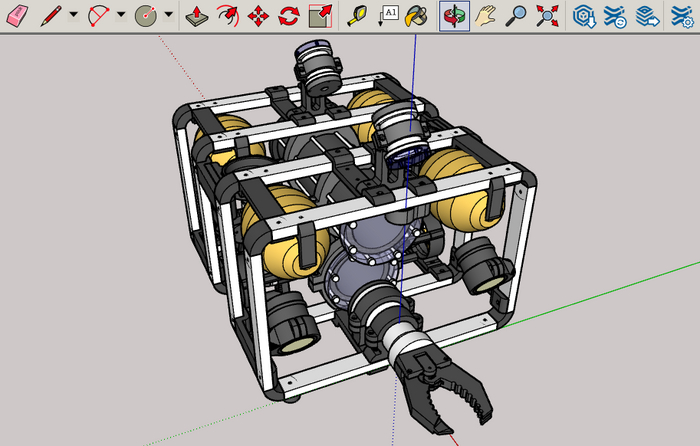
Первоначально сделал 3д модель, чтобы понять размеры всех частей и узлов и способ их компактного размещения. В итоге около 100 деталей смоделировано и распечатано на 3д принтере. Как оказалось, эти детали достаточно крепки и хорошо выдерживают давление воды.
Моторы – 6 штук, с большой тягой, подшипники заменены на керамические, потому как обычные от воды, особенно соленой, сразу ломаются, корпуса моторов также спроектированы и напечатаны на 3д принтере.
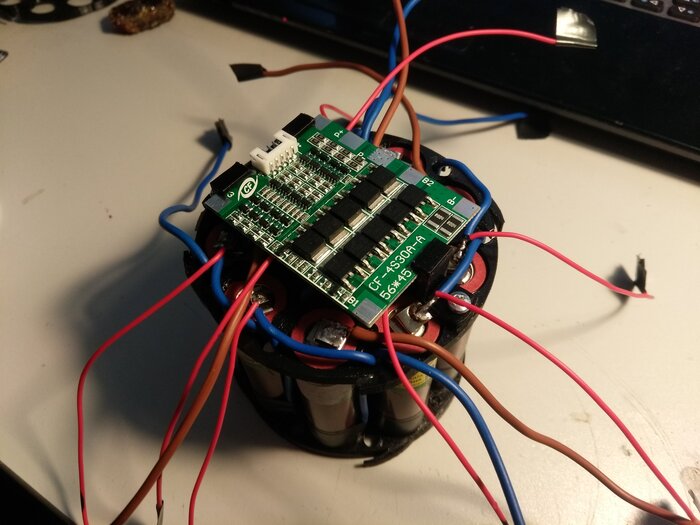
Сделаны два герметичных бокса из водопроводной трубы высокого давления. Конечно, можно было выточить их из алюминия, сделать меньше и красивее, но мы помним, что мы все делаем из доступных материалов. В одном боксе – все электроника (практически идентична начинке «воздушного коптера»), во втором - аккумуляторная батарея, которая состоит из 24 литий-ионных элементов форм-фактора 18650, что дает около 24 ампер-часов и позволяет роботу проплавать несколько часов под водой.
Свет – залитые компаундом светодиодные лампы в корпусах, которые, как и все остальное, напечатаны на принтере.
Присутствуют 3 камеры, одна в основном боксе пишет HD видео, две другие – аналоговые камеры ночного видения, передают видео в очки, при этом одна смотрит назад, чтобы контролировать провод, что плетется позади дрона.

Сам провод, как я уже упомянул, специальный, созданный для подобных роботов, имеет положительную плавучесть и кевларовую нить внутри, поскольку не только передает сигналы для управления и видео, но и позволяет вытягивать робота с глубины, если он утонет.

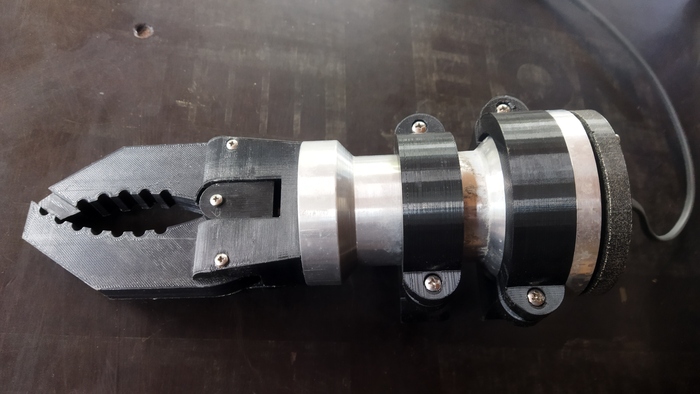
Присутствует клешня-манипулятор, корпус которой выточен из алюминия, а все остальное распечатано на принтере, внутри - обычный коллекторный мотор. К слову, при изготовлении только двух деталей пришлось обратиться к токарю – при изготовлении клешни и боксов для света, поскольку они требовали особой формы. При желании можно было обойтись – первая рабочая версия клешни была тоже распечатана на принтере и залита компаундом. Эта клешня легко может раздавить пустую пивную банку.
Ну и немного про цифры. Себестоимость всех запчастей для изготовления робота составила около 40 тысяч рублей без учета кабеля. Специальный кабель стоит 3-5 долларов за метр, но в первой версии я использовал витую пару с привязанными поплавками от рыболовных сетей, что тоже прекрасно работало, но было не очень красиво.
P.S. Ответить на вопрос, зачем мне это надо, я не в состоянии. Наверное, было просто интересно, монетизации тут никакой нет – инженерное хобби в чистом виде.



