Эмпатичный осьминог и реквизит для телешоу: как заработать на любви к изобретениям

@ Личный архив предпринимателя
Инженер-изобретатель из Москвы Сергей Цысс несколько лет создавал уникальные объекты для телепередачи "Жить здорово!" на Первом канале, а сейчас его компания "Механиум" делает интерактивные экспонаты и роботов. Портал "Будущее России. Национальные проекты" поговорил с изобретателем о том, как созданные из подручных материалов роботы помогают объяснять сложные явления.
Журналистика, театр, инженерия
Сергей еще в юности хотел стать радиоинженером, даже получил профильные навыки, но потом увлекся журналистикой, позже — театром и кино, и в конце концов окончил Щукинское училище.
"По набору компетенций получилось весьма странное сочетание. Я и инженер, и журналист, и актер, и режиссер. Даже работал в Московском театре на Таганке, но в конце 1990-х годов зарплата была маленькая и возникли трудности с оплатой аренды жилья. Поэтому я ушел на телевидение, где сначала был просто помощником на съемочной площадке — помогал художникам по костюмам, по гриму, по реквизиту. И лишь через несколько лет, узнав о моих изобретательских и креативных навыках, ребята из команды создателей телепроекта "Жить здорово!", который в 2010 году начала вести Елена Малышева, предложили мне сделать несколько больших макетов для съемок", — рассказывает Сергей.
Его первым заданием стал макет системы кровообращения человека: "Нужно было наглядно показать, как это работает".

@ Личный архив предпринимателя
"Я использовал шланги, подкрашенную дистиллированную воду и два прозрачных насоса. Сделал силуэт человека и, соответственно, показал циркуляцию артериальной и венозной крови с помощью жидкости, — вспоминает изобретатель. — Там был сложный момент: выяснилось, что движение жидкости в прозрачном шланге увидеть невозможно. Поэтому я придумал сделать два отверстия в шлангах в правильных местах, чтобы движущаяся вода захватывала пузырьки воздуха и дальше бежала вместе с ними. Тогда-то я понял, что многие явления природы, науки, техники можно показывать с помощью разных объектов".
Для телепередачи Сергей создал более 40 уникальных макетов, которые, например, демонстрировали принцип работы глаза, мозга или вестибулярного аппарата, процесс функционирования почки и кишечника, механизм амортизации стопы при движении.
"Свое направление я определил как Art&Science — сочетание искусства и науки. В нашей стране на тот момент оно было не развито, да и сейчас им занимаются единицы. Мне приходилось создавать каждый раз новое уникальное устройство. И при этом к нему должны были предъявляться высокие требования: помимо познавательной функции, это ремонтопригодность, безопасность и антивандальная защита, так как я видел своими потенциальными заказчиками еще и научные музеи", — поясняет Сергей.
Робот Василий привел в бизнес
К тому, чтобы заняться бизнесом, Сергея подтолкнул спор с приятелем.
"Мой коллега, инженер и ученый Альберт Ефимов, который в то время был главным робототехником Сколково, а теперь возглавляет лабораторию робототехники Сбербанка, сказал, что для выставки Skolkovo Robotics 2017 им нужны необычные роботы. А у меня как раз была идея создать аппарат не с искусственным интеллектом, а, скорее, с искусственным характером, чтобы он формировал свое отношение к человеку и заставлял его реагировать на всякие смешные провокации. То есть проявлял эмоции и менял цвет в зависимости от настроения. Альберт меня поддержал, но сказал, что за месяц создать такое невозможно, однако я решил попробовать", — вспоминает Сергей.

@ Владимир Гердо/ТАСС
@ Михаил Терещенко/ТАСС
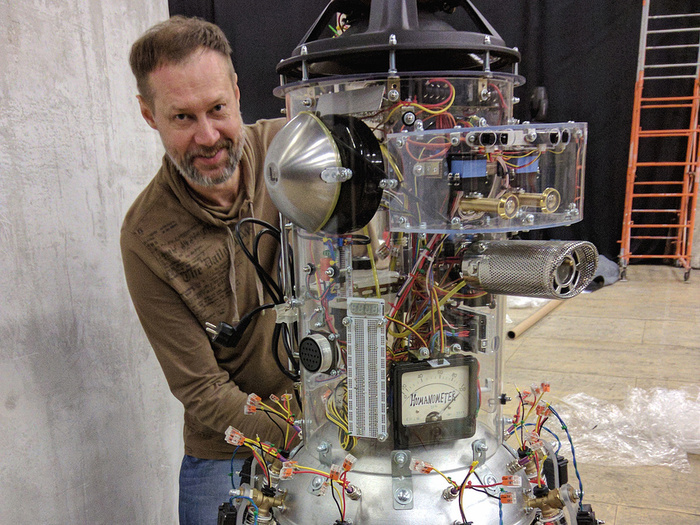
Робот-осьминог Василий действительно был сконструирован к сроку, причем у Сергея дома.
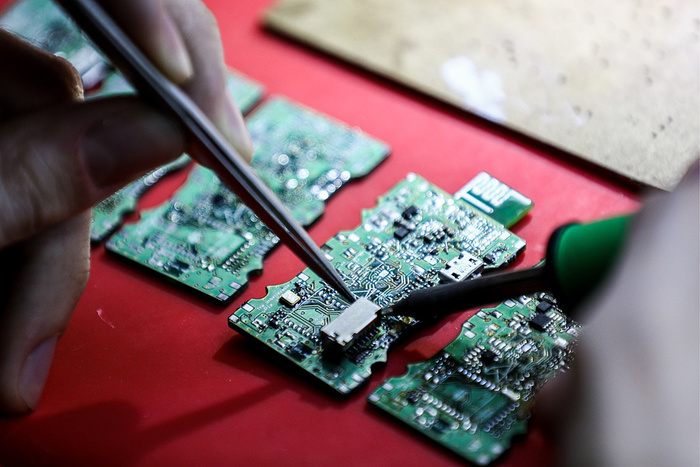
Несмотря на то что Василий был сделан из подручных материалов — казана для плова, вантузов, выхлопной трубы, большого динамика и садовых шлангов, — в него заложена сложная компьютерная программа, а внутри спрятано множество составляющих для управления роботом — микроконтроллер, драйверы, блоки коммутации. Для создания "прошивки" робота Сергею пришлось оперативно вспомнить и подточить навыки программирования на языке C++.
При включении робот танцует, поет песни и брызгается водой. Кажется, что это обычный развлекательный аппарат. Однако, когда в его поле зрения попадает человек, Василий начинается общаться. Например, здоровается: "Здравствуй дружок! Возьми с полки электропирожок!"
После каждой фразы можно нажать одну из трех кнопок на кастрюле, которая является пультом управления, — зеленую, желтую или красную, в зависимости от того, понравился или не понравился ответ. Робот считывает эти "эмоции" и подстраивает следующие фразы под настроение человека. В этом и заключается его "искусственный характер". Он может пофилософствовать или пошутить, сказав: "Ну что? Ипотеку-то выплатил?"
Сергей Цысс
@ Личный архив предпринимателя
"На выставке Skolkovo Robotics 2017 робот произвел настоящий фурор, это был один из самых востребованных объектов, вокруг которого собиралась толпа зрителей. После выставки появился частный заказчик, который решил приобрести "двойника" Василия. Я установил сумму 500 тыс. рублей, и клиент согласился", — говорит Сергей.
Тогда же изобретатель решил заявить о себе как о предпринимателе. Он придумал название компании — "Механиум", рассчитывая, что она объединит молодых инженеров, и нарисовал логотип — улыбающийся смайлик в виде зеленой подводной лодки с большим гребным винтом. Тогда же он создал каталог своих изобретений — реализованных и будущих — и выложил их на сайте.
АЭС для "чайников"
Свой стартовый капитал — вырученные от продажи робота средства — изобретатель вложил в аренду помещения и покупку профессиональных электроинструментов.
"В 2017 году я написал пост в Facebook с просьбой приютить компанию "Механиум". И нас выручил московский бизнес-ангел, основатель проекта "Лига роботов" и мой друг Павел Баскир. Он предложил мне работать в пространстве площадью 30 кв. метров в бизнес-центре на Новодмитровской улице. Мы стали резидентами "Лиги роботов" и платили за аренду всего 15 тыс. рублей в месяц. Это были льготные условия субаренды, так как мы договорились, что любой человек из "Лиги роботов" может прийти к нам и что-то изобретать, собирать, а мы в этом помогали, — рассказывает Сергей. — Именно тогда коллектив компании "Механиум" начал пополняться молодыми ребятами, которые приходили к нам мастерить. Некоторые стали постоянными членами коллектива, а другие работали только по точечным проектам".

@ Личный архив предпринимателя
В том же 2017 году компания начала работать с крупными заказами — первый поступил от Информационного центра атомной отрасли (оператор сети Информационных центров по атомной энергии. — Прим. ред.) в рамках проекта "Мирный атом". Центры занимаются информированием жителей регионов о работе атомной отрасли, перспективах развития ядерной энергетики и радиационных технологий, их задача — повысить престиж отраслевых профессий и популяризовать науку.
"Они нашли нас через сайт, позвонили и предложили сделать эксклюзивные образовательные экспонаты, которые бы объясняли принцип работы атомной электростанции и другие явления. Я сразу же договорился о встрече, привез идеи экспонатов, и мы быстро договорились о сотрудничестве", — вспоминает Сергей.
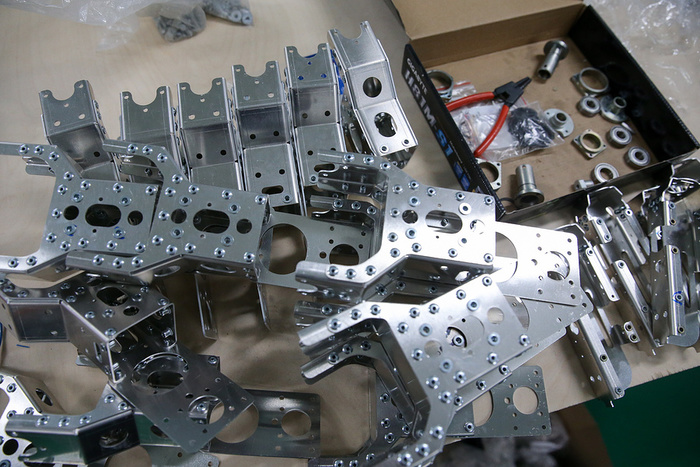
Вместе со своей командой он изготовил для этого проекта несколько партий не имеющих аналогов интерактивных объектов, которые были отправлены в 14 городов России и ближнего зарубежья. Среди них — большой счетчик Гейгера для определения фоновой радиации и измерения излучения любого предмета, макет атомной электростанции, синтезатор атомных элементов и другие.
"Оказывается, с помощью электрического чайника, пара, вращающего колесо-турбину из чайных ложек, и макета дома с загорающимися окошками можно доступно объяснить детям и взрослым принцип работы атомной электростанции. Благодаря такому интерактивному объекту не нужно обладать специальными знаниями, чтобы понять некоторые базовые принципы сложных явлений", — признается Сергей.
Новый виток
В течение 2017-2018 годов компании удалось выйти на других заказчиков — автомузей "Моторы октября", выставку "Открытый космос", робостанцию на ВДНХ, Московский зоопарк, музеи "Живые системы" и "Экспериментаниум".
Летом 2019 года компания решила переехать в более просторное помещение, чтобы "было где развернуться" в условиях возросшего числа заказов. Подходящая площадь нашлась в одном из павильонов на ВДНХ. Стоимость аренды здесь составляет 100 тыс. рублей в месяц. Еще 2 млн рублей пришлось вложить в оснащение нового помещения и закупку оборудования, современных устройств: 3D-принтера, высокоточного фрезерного станка для изготовления объемных изделий, станка лазерной резки, систем фильтрации и пылеудаления. Инструменты "позапрошлого поколения" (молотки, рубанки, пилы и т.д.), "прошлого поколения" (дрели, лобзики, шуруповерты и т. д.) уже были.

@ Донат Сорокин/ТАСС
"Во главе угла у нас, конечно, стоит идея — интересная аналогия или метафора для объяснения научного явления. Она заключается в том, чтобы на простом примере показать, как работает некая сложная конструкция, как устроен какой-нибудь замысловатый на первый взгляд процесс. Это мы и реализуем потом в интерактивном объекте или экспонате, добавив туда игровой или соревновательный элемент, — рассказывает Сергей. — Однако для воплощения творческой идеи требуются серьезные знания и навыки. Например, нужно великолепно владеть программами 3D-моделирования, знать массу технологических вещей, связанных с работой современных станков с числовым программным управлением и их обслуживанием. Если для обучения работе с шуруповертом вам потребуется пять минут, то для работы на фрезерном станке с ЧПУ вам придется учиться около года".
Сейчас в компании "Механиум" шесть сотрудников. Ассортимент изделий, которые они могут производить, насчитывает свыше 300 интерактивных объектов из самых разных областей человеческого знания. Почти все они уникальны и не имеют аналогов в мире. Выручку компании ее основатель не раскрывает — такова договоренность с партнерами.
Торможение в условиях пандемии
Из-за пандемии работа компании была временно заморожена. В апреле и мае новых заказов не поступало, а работу по текущим проектам приостановили. Это связано с тем, что выставки и другие массовые мероприятия в России из-за эпидемии оказались под запретом.
Зато удалось получить господдержку, так как компания ведет деятельность в области культуры, спорта, организации досуга и развлечений, то есть входит в число пострадавших из-за пандемии.
"Мы получили безвозмездные субсидии на выплату зарплаты сотрудникам. Это оказалось просто: зашли на сайт налоговой службы, заполнили заявление и спустя несколько дней эту заявку одобрили", — делится Сергей.
При этом взять льготный кредит под 2%, чтобы пополнить оборотные средства и заплатить аренду, предпринимателю не удалось.
"Несмотря на то что мы старейшие клиенты одного из крупных банков, получили отказ по формальной причине — из-за отсутствия оборотов во время пандемии. Но не сдаемся и будем обращаться в другие банки, например в МСП Банк, где более гибкие условия", — говорит изобретатель.
@ Антон Новодережкин/ТАСС
Также компании пришлось снизить порог вхождения в проект, то есть минимальную сумму, при которой она готова браться за выполнение заказа, чтобы оставаться в пределах рентабельности. В марте этот порог составлял 300 тыс. рублей, сейчас — 250 тыс. рублей.
Сергей рассчитывает, что полностью восстановить выручку удастся к декабрю этого года. Поможет в этом завершение работ по действующим контрактам и новые проекты. Например, в конце июля компания вернулась к выполнению заказа для одного из российских силовых ведомств.
Предприниматель надеется, что в результате пандемии усилится роль цифрового взаимодействия бизнеса и государства. В частности, в новой редакции нацпроекта "Малое и среднее предпринимательство и поддержка индивидуальной предпринимательской инициативы" будет предусмотрено внедрение системы "одно окно" по предоставлению услуг малым предприятиям. В июле этот проект анонсировал премьер-министр Михаил Мишустин.
"Очень бы хотелось, чтобы была создана такая "кнопка", через которую можно получить полный список мер господдержки, доступной нашему виду бизнеса, а не искать это по всему интернету и читать документы правительства. Это можно реализовать через портал государственных услуг, потому что там уже есть вся информация — сколько я налогов заплатил, чем занимаюсь. Опять же, есть искусственный интеллект, есть нейросеть", — считает предприниматель.