[KSP: RSS] Полет на Луну с посадкой и возвратом (беспилотник)
Вступление: автоматический тэг "гифка" удалить не получается даже редактированием поста. Извините. К традиционным гифкопостам этот не относится, лишь содержит несколько для наглядности.
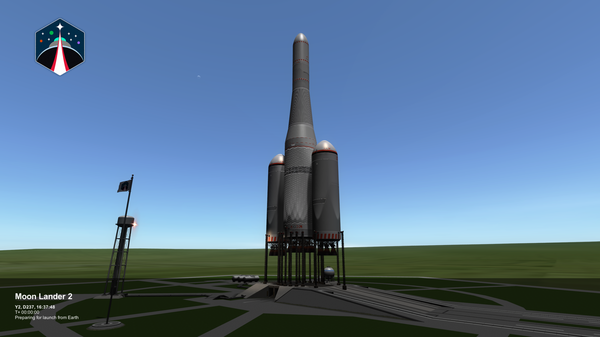
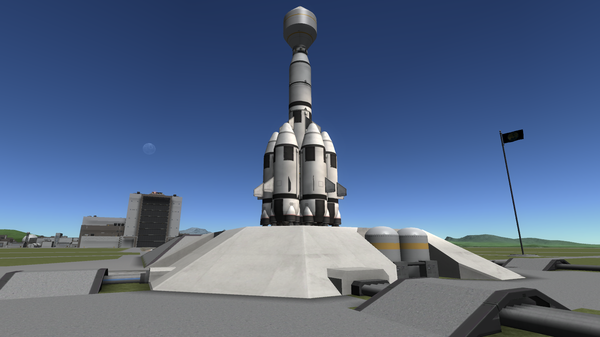
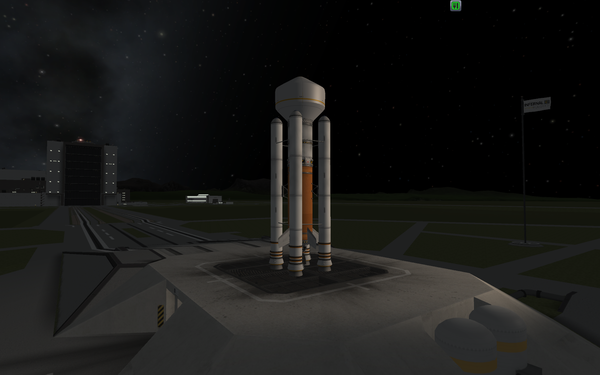
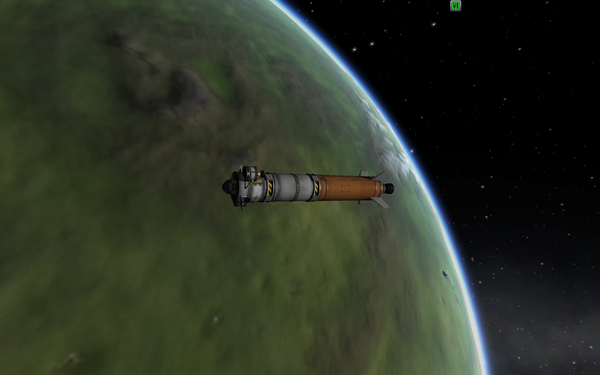
Параметры ракеты:
Масса: 19,500т (ПН - 450т).
dV: 21,350м\с.
Деталей: около 200.
В принципе эта РН может поднять около 475т на низкую опорную орбиту. Причем на третьей ступени стоят движки с 3-мя зажиганиями - в случае более легкой полезной нагрузки остатки топлива можно использовать для разгона на орбите. Разве что разворачивать эту конструкцию в нужную сторону с помощью маневровых двигателей самого зонда было немного долго. :)
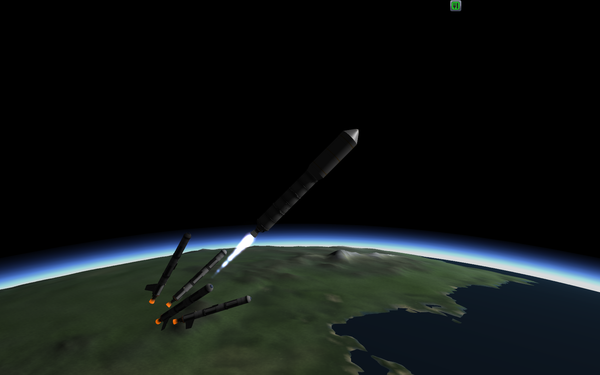
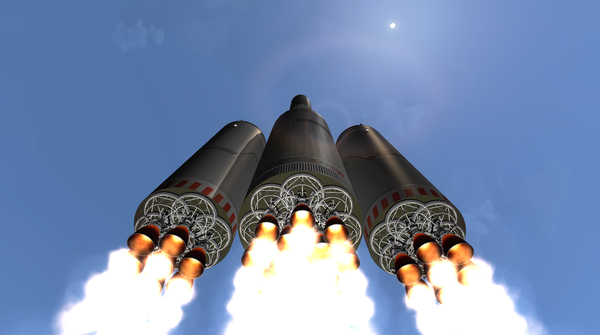
Первая ступень состоит из кластеров двигателей F-1 - порядка 25-30шт.

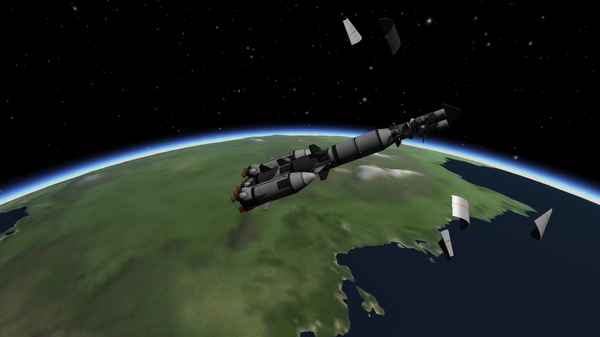
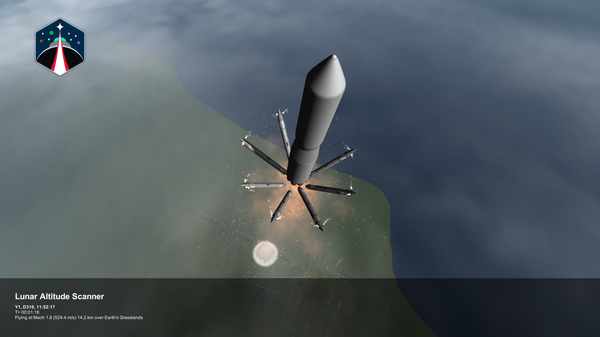
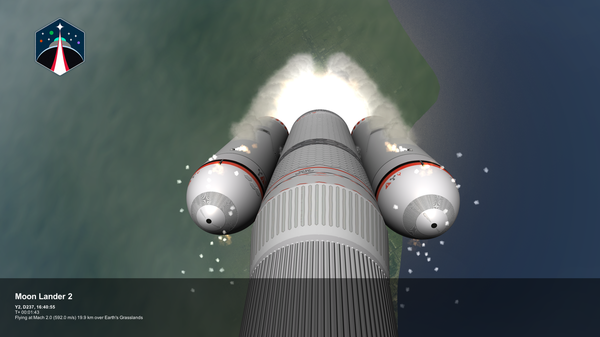
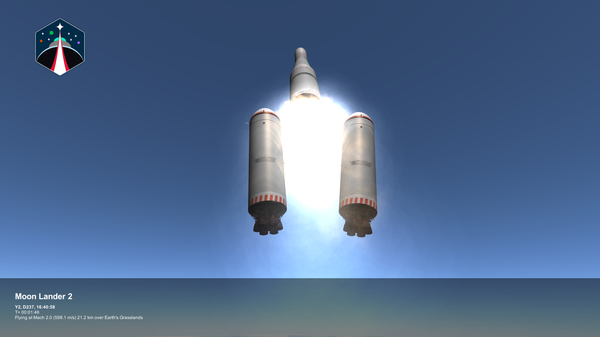
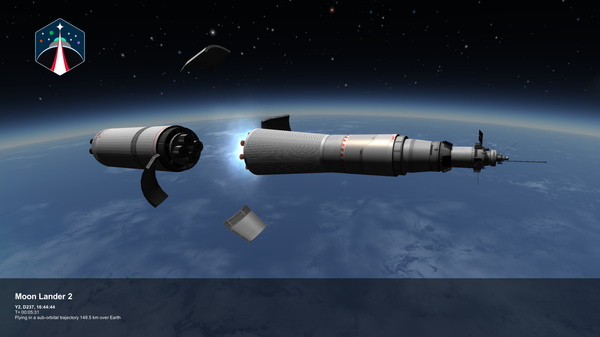
Боковые ускорители весьма тяжелые - тяги 4-х ретробустеров не хватает, чтобы отвести их на безопасное расстояние от корпуса. Однако, при отделении они ни разу не ударяли по ракете.
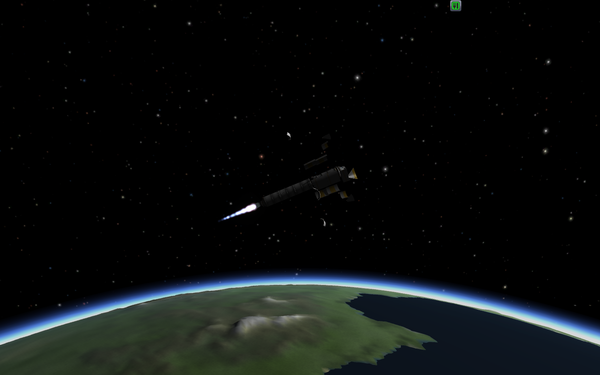
А вот у обтекателя тесты показали недоработку: дефолтной силы отстрела было недостаточно и половинки ударяли по нижней утолщенной части ракеты. Поставил силу отстрела на 100 - теперь все в порядке.

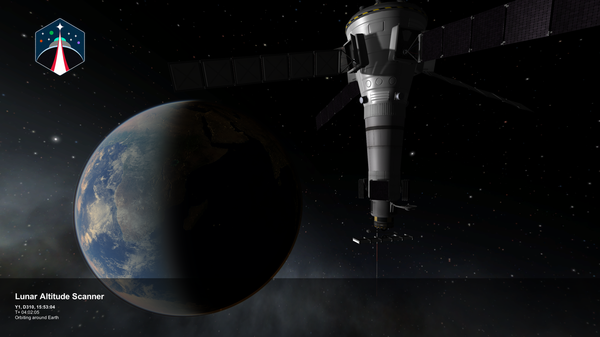
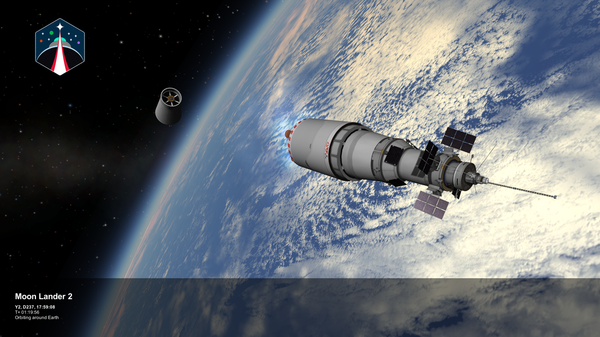
При сборке и тестировании ракеты столкнулся с неприятным и достаточно известным багом: при попытке разложить солнечные панели и антенны на орбите получаем ошибку - Cannot deploy while stowed. Несмотря на то, что в последних версиях KSP баг был выпилен (так считается), он по-прежнему встречается в RSS. Благодаря этому комментарию на форумах KSP, стало ясно: баг вызывают двигатели RL10 и RD253.
На закругляющей орбиту ступени у меня стояли как раз РД-253. Убрав эти двигатели, я избавился от бага. Вместо них влепил несколько J-2 - тех, что использовались на второй и третьей ступенях ракеты Сатурн-5, которая доставила американцев на Луну.
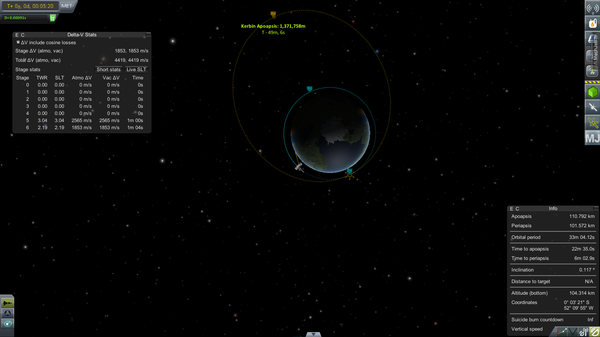
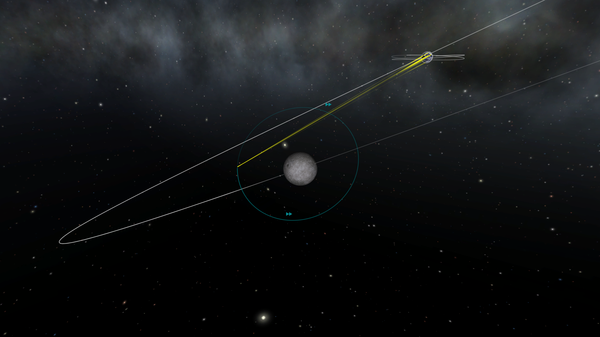
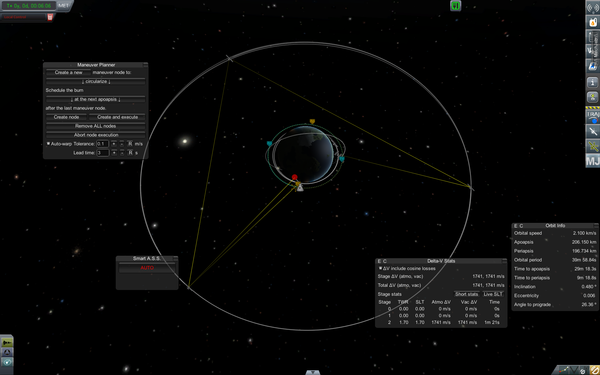
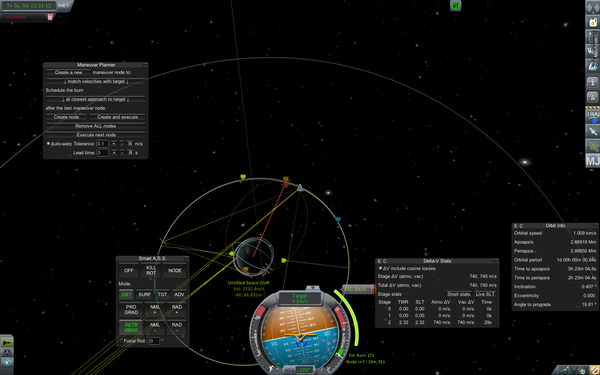
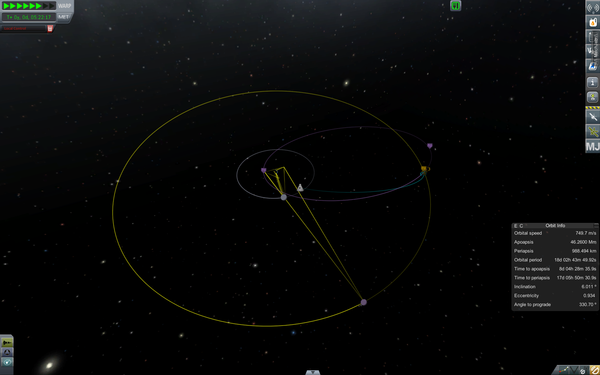
Как и расчитывал, третью ступень дожег уже при совершении маневра перелета к Луне. Это сэкономило мне порядка 1300м\с.
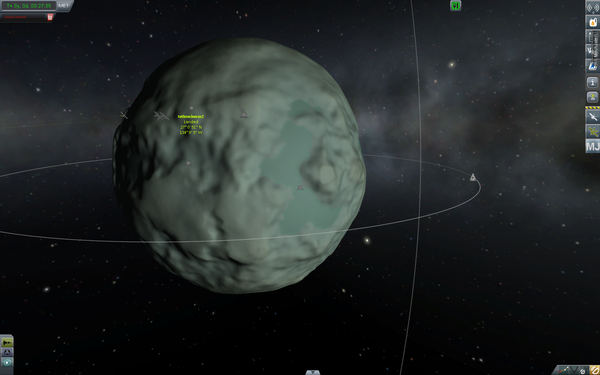
И по прилету к Луне начались проблемы.
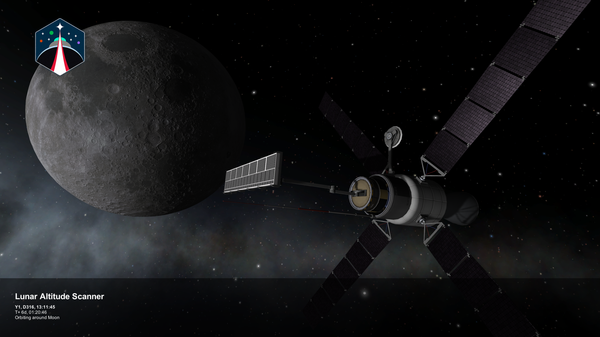
Проблема первая - просчет конструкции. Корабль был все еще очень тяжелый и маневровых движков зонда не хватало для его нормальной раскрутки и придания начального импульса для утрамбовки топлива. Приходилось тратить порядка полутора-двух минут, совершать 2 оборота - только тогда топливо "устаканивалось" и можно было включать двигатели. А контроль вектора тяги останавливал вращение.
Проблема вторая - то ли баг, то ли хрен знает что.
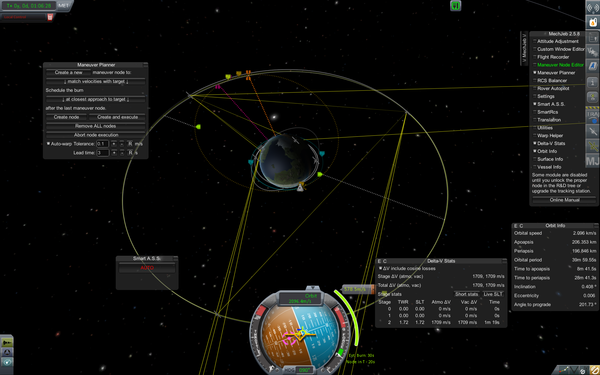
Система управления норовила раскручивать корабль по одной из осей. Проверил и MechJeb, и RemoteTech'овский компьютер, и переключался с корабля на корабль, и в KSC выходил. В чем было дело так и не выяснил - проблема сохранялась до самого конца. Лечилась только включением стокового SAS - он удерживал корабль нормально.
Помимо прочего, MechJeb немного взбесился: его Smart A.S.S. очень хреново удерживала вектор маневра. Ну, никто не мешает рулить по-старинке вручную.
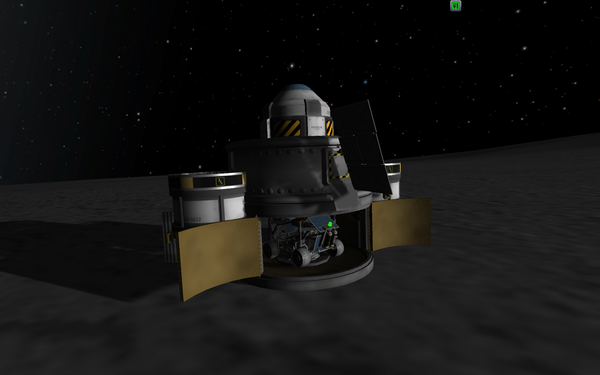
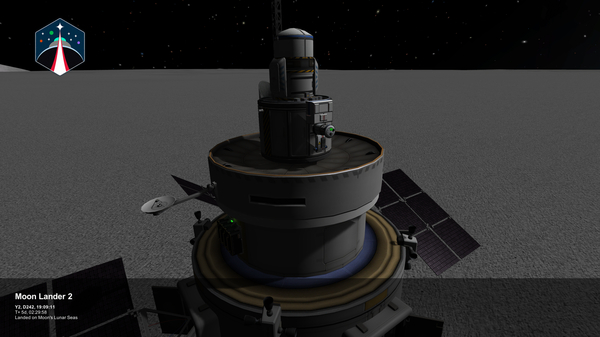
Проблема третья - отказалась активироваться посадочная ступень. Пришлось все 8 двигателей запускать вручную, предварительно раскрутив корабль.
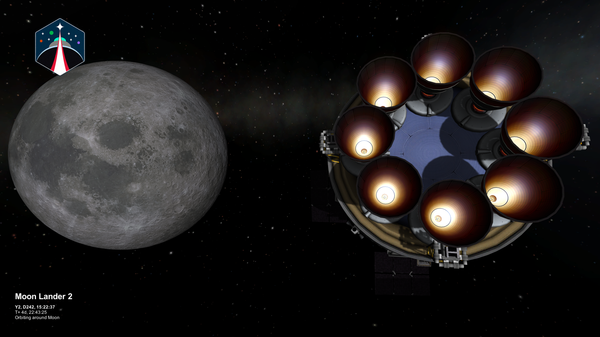
Движки - Lunar Descent Engine. По умолчанию они имеют 3 зажигания и очень не любят, когда им подают вакуум в камеру сгорания.
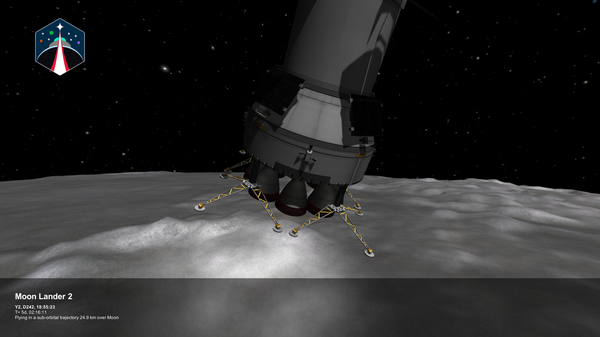
У движков стоит модификация, позволяющая контролировать тягу до 10% минимум. Это практически необходимо при посадке на безатмосферные тела.
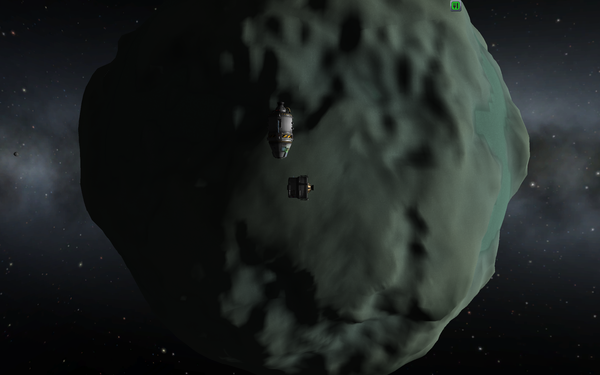
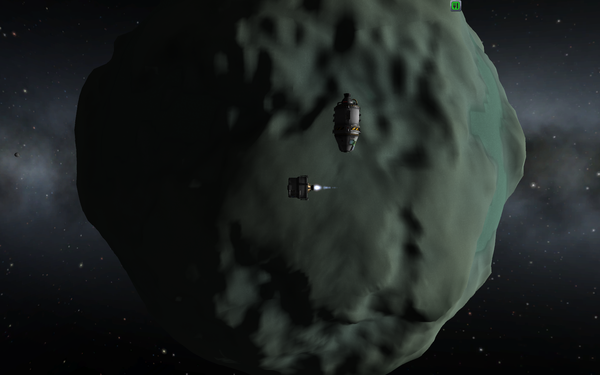
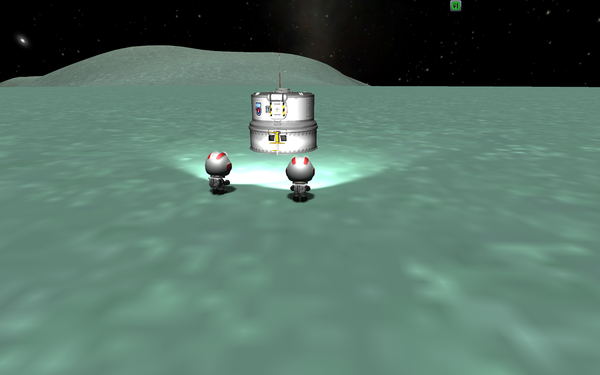
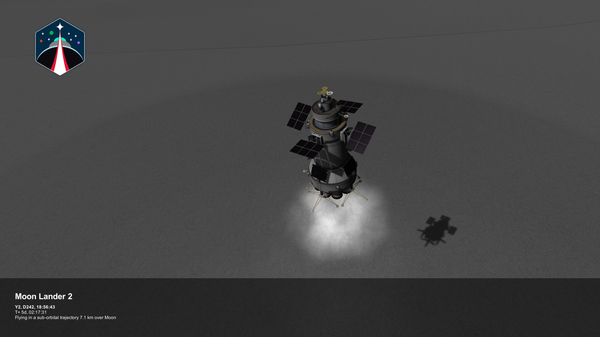
Посадка была очень жесткой. Тормозить я как правило начинаю немного заранее - примерно за 1-2 секунды, далее корректирую скорость снижения тягой или вектором тяги. Поскольку снижение не вертикальное, запас времени необходим, если сажаешься на потенциально неровную поверхность. Небольшой холмик в десяток метров и уже можно разбиться. Получилось так, что незадолго до прилунения я недостаточно быстро убавил тягу - в итоге, не коснувшись поверхности, поднялся на 50 метров. Выключать двигатели нельзя - больше возможности их включить не будет. С работающими, пусть и на 10%, двигателями зонд совсем не торопился снижаться, а топлива остались капли.
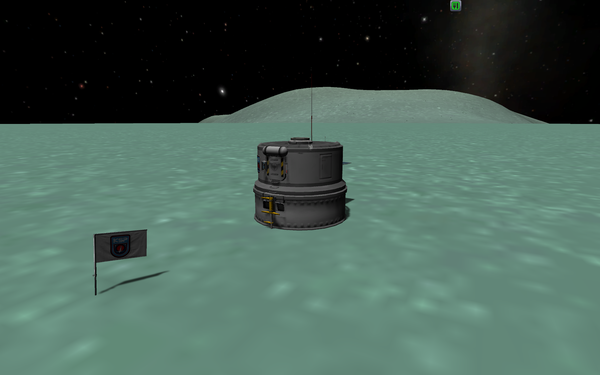
На оставшихся 15m\s дельты дал полную тягу - корабль "пукнул" и плюхнулся с большой высоты на поверхность. Честно, я думал, хана нижней части и, если после этого зонд завалится, миссии скорее всего тоже конец. Скорость касания заметить не успел - полагаю, до 10м\с. Но подпрыгнул он нехило, после чего маневровые выровняли нос сильно облегченного корабля. Опоры выдержали!
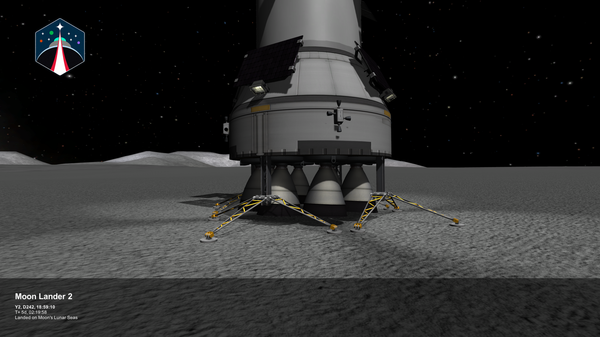

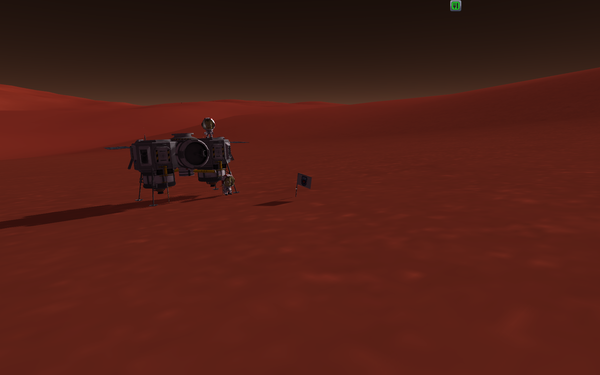
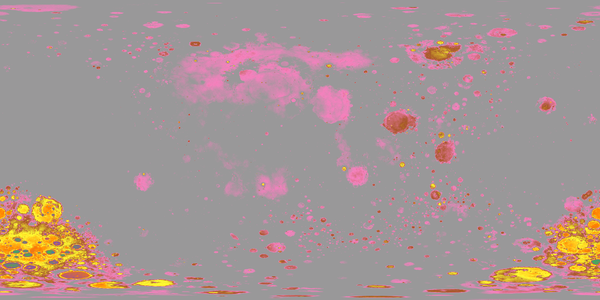
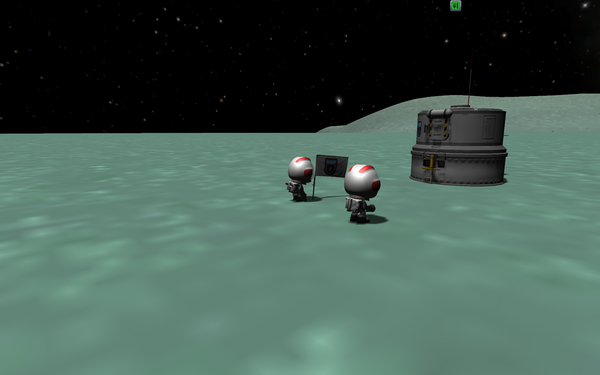
Науки собрал на удивление мало: что-то порядка 200-250. Это включая около 5 низкоорбитальных экспериментов из биомов, которые раньше не успевал "обработать".
Эксперименты, правда, еще не все открыты.
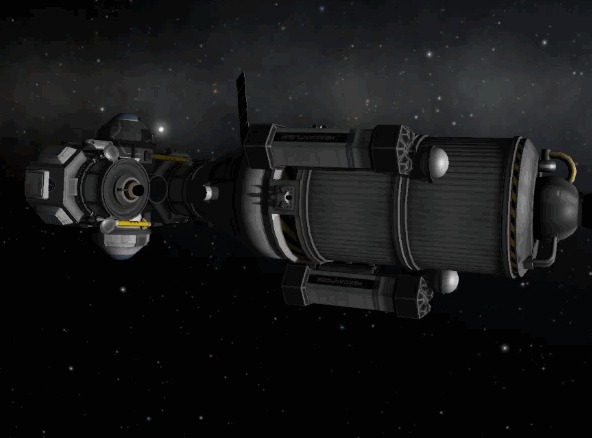
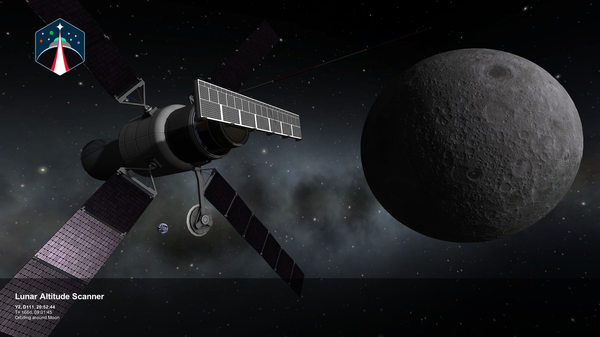
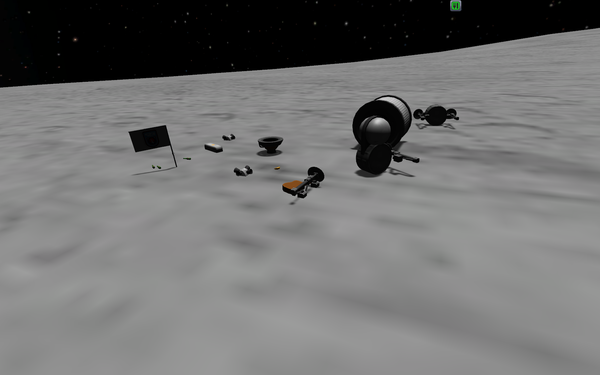
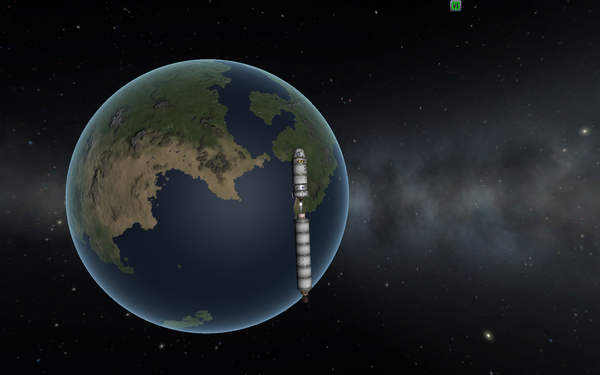
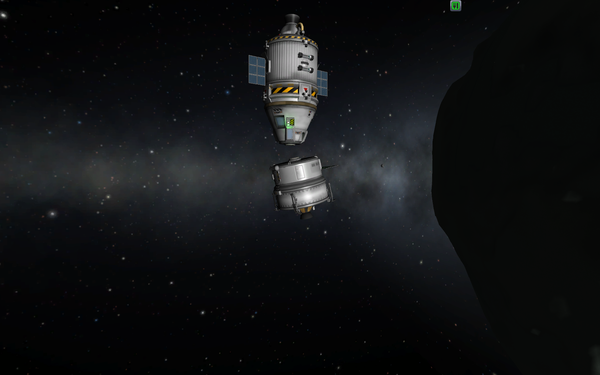
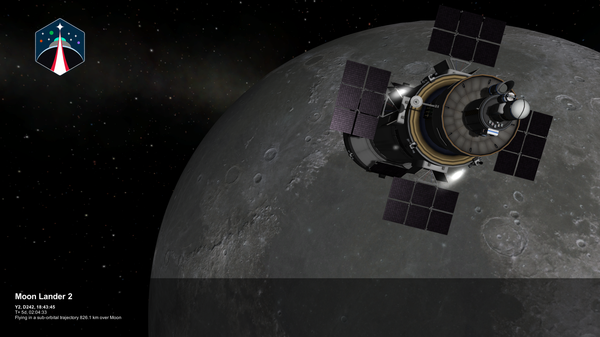
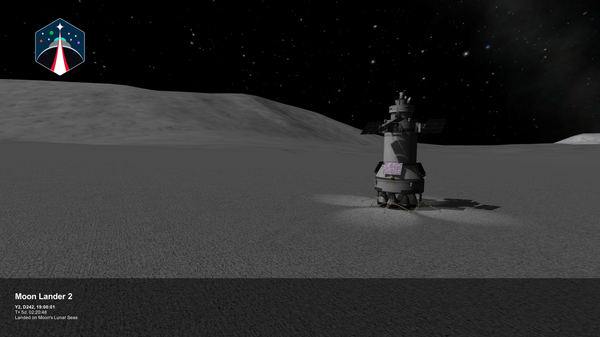
Дальше дело за малым. Оставляем посадочную ступень на поверхности, отстыковываемся и домой!
Кстати, у нее есть свой компьютер, батареи и солнечные панели. Модуль не считается за отработанную ступень и потому не должен быть удален игрой автоматически. Возможно, еще вернемся сюда. :)
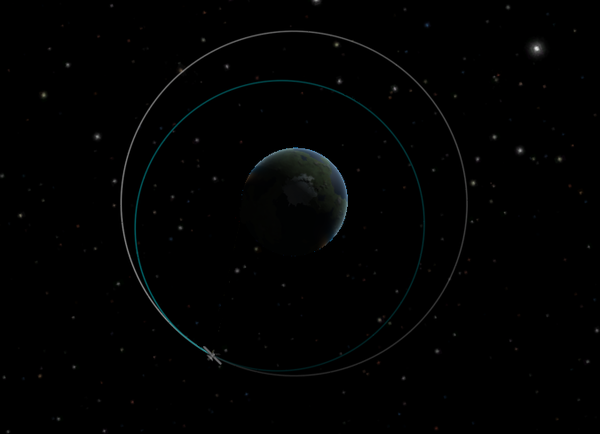
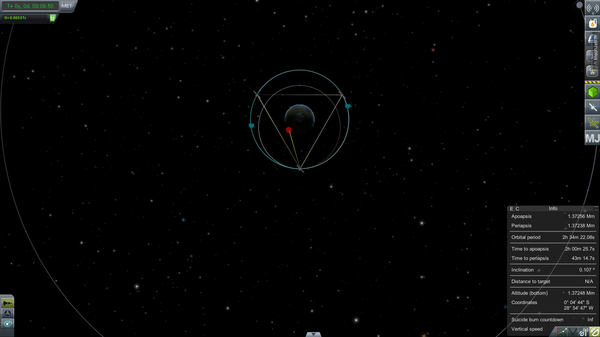
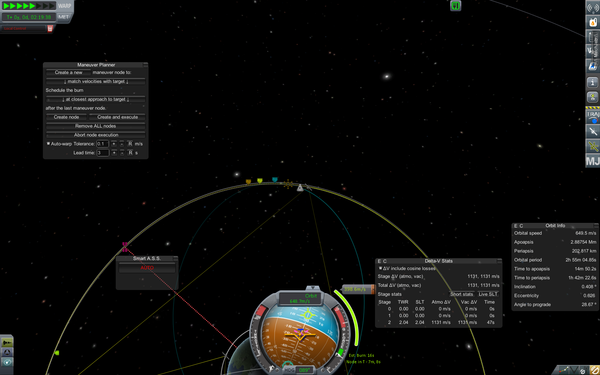
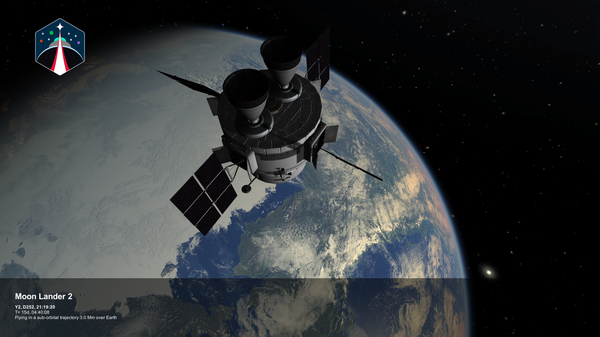
Ну а дальше - дело за малым. Выйти на низкую орбиту и выполнить прожиг для возвращения домой. На последнюю пару двигателей я поставил модификацию, отключающую контроль тяги, но добавляющий еще 2 зажигания - в итоге имеем 5. Одно для достижения нужной высоты, второе для закругления орбиты. Слишком большая тяга не позволила закруглить ее в один прожиг, а газовать сильно ниже уровня горизонта не хотелось - это потеря топлива. Третье - прожиг домой, четвертое - торможение. Пятое - на всякий случай.
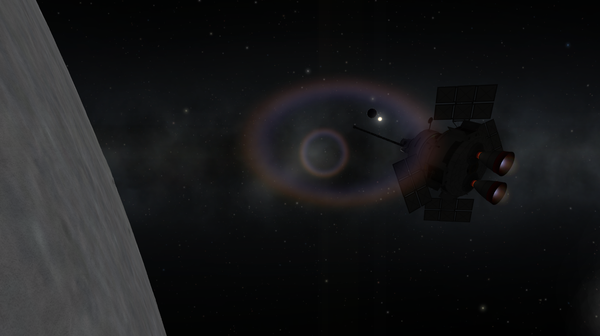
Затмение запечатлеть не получилось - Земля не прошла по диску Солнца.
Финальное торможение и сброс перицентра до 65км. Помогал маневровыми. Кстати, тоже на последних каплях топлива. Правда, порядка 85% гидрозина я сливал у Луны, чтобы облегчить корабль. В будущем буду брать больше топлива для тормозной ступени - и так впритык хватило даже со сливом лишней массы.

Сам зонд не имеет ни батарей, ни возможности управления, но отлично стабилизирован для атмосферного торможения - центр масс как раз где надо. Немудрено - щит тяжелый.
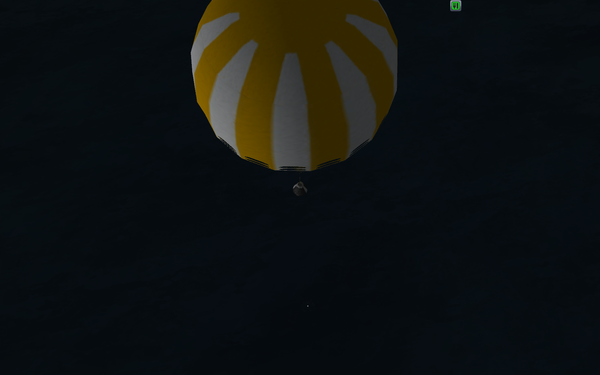
Автоматическое раскрытие парашютов по достижении указанной высоты выполняет RealChute.
Сброс всего лишнего и аэродинамическое торможение.
Плазменные эффекты дополнены модом ReentryParticleEffect.

И-и.. успешное приводнение!

Пост вышел длинным, даже уперся в лимит по картинкам.
Спасибо за внимание и успешных полетов! :)