

Шагающий УАЗ "Буханка"

Всем привет. Сегодня у меня для Вас проект шагающего УАЗ "Буханка" =)
Ссылка на страницу проекта - https://www.thingiverse.com/thing:4063805
Там можно найти все 3D модели в форматах STL и STEP, и список всех комплектующих со ссылками.
Подробный видеогайд по сборке:
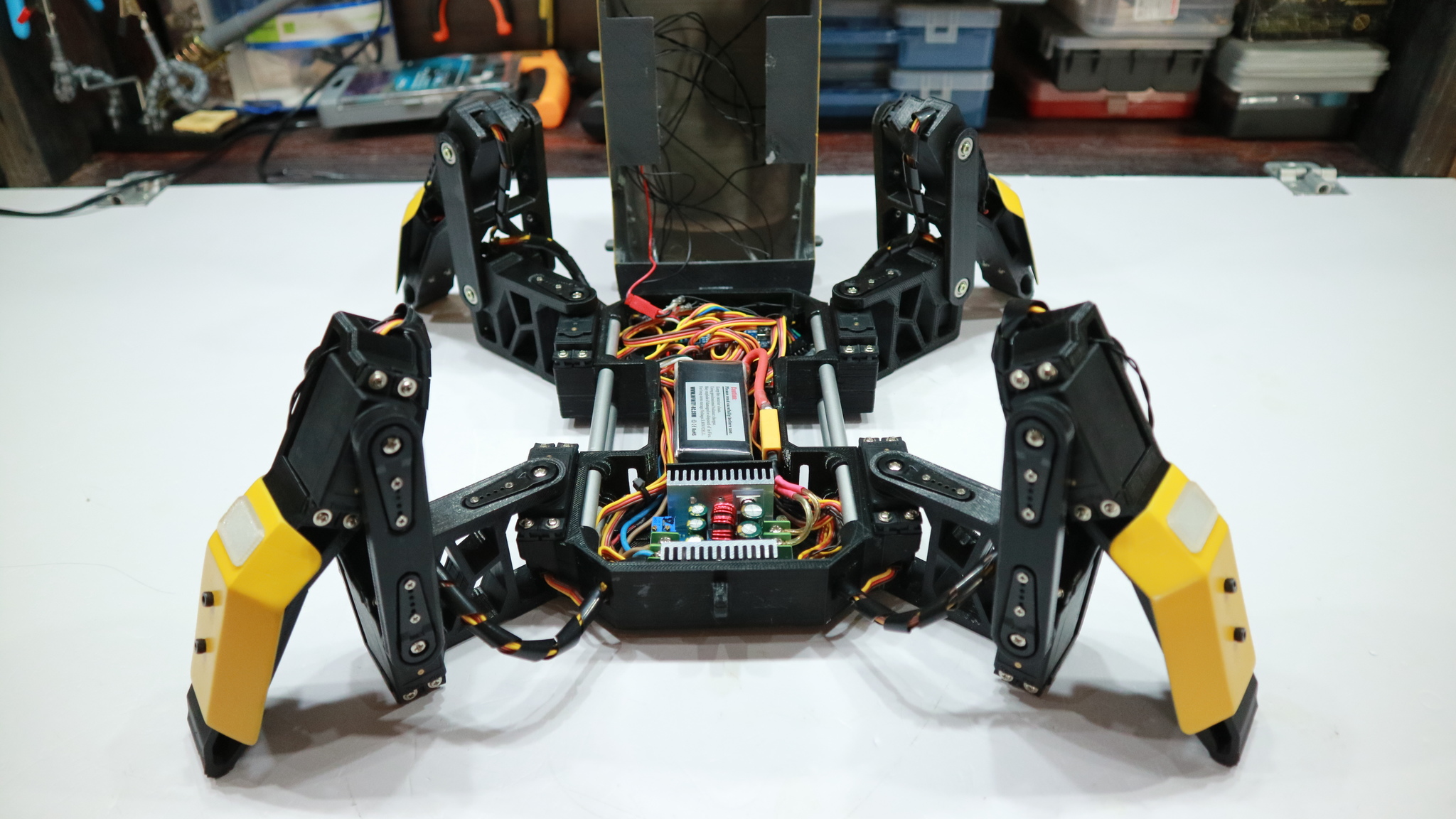
По сути - это простой шагающий робот, управляемый по блютуз со смартфона.
Самая дорогая часть - это сервы. На этот раз закупился качественными MG996R от Tower Pro, и они обошлись не дёшево. Но, безусловно, они того стоят. Сервы мощные, с двойным подшипником, очень надёжные.
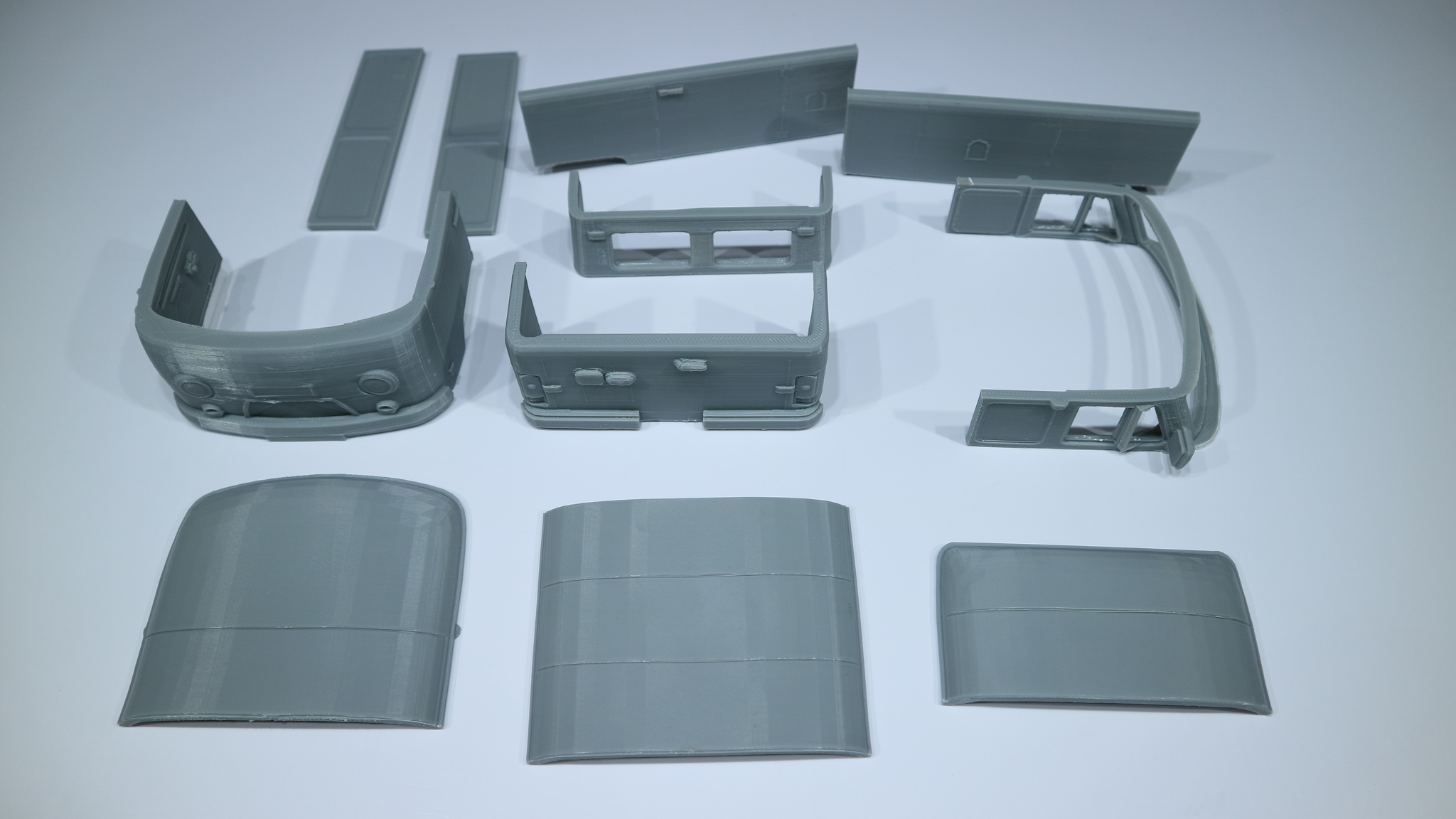
Больше всего времени ушло на обработку и покраску кузова, который состоит из 11 частей. Очень много работы с надфилем и наждачной бумагой.
Кузов напечатан ABS пластиком. База и ноги - PLA пластик. Фонари и фары - прозрачный Watson. Наконечники ног - крутейший BFGummy. Впервые печатал этим филаментом и остался доволен, как слон. Отличная фактура, очень похоже на плотную резину.

Робот получился простым, надёжным, живучим и сравнительно не дорогим, как для своих размеров. Вышло очень не плохо, особенно если учесть, что это мой первый самостоятельно спроектированный шагающий робот, пусть и простейший.


Если после просмотра видео у Вас остались вопросы - задавайте =)
Лига 3D-принтеров
3.3K поста13.8K подписчиков
Правила сообщества
Запрещено хамство и оскорбления, уважайте чужой опыт и труд