FPV Фристайл. Строим дрон
Ранее в этой серии:
Покупаем:
1. Начало.
2. Аппаратура.
3. Дрон.
4. Рама.
5. Моторы.
6. Регуляторы.
8. Камера.
9. Видеопередатчик.
11. Очки.Итак у нас куплены все составляющие квада, можно собирать.
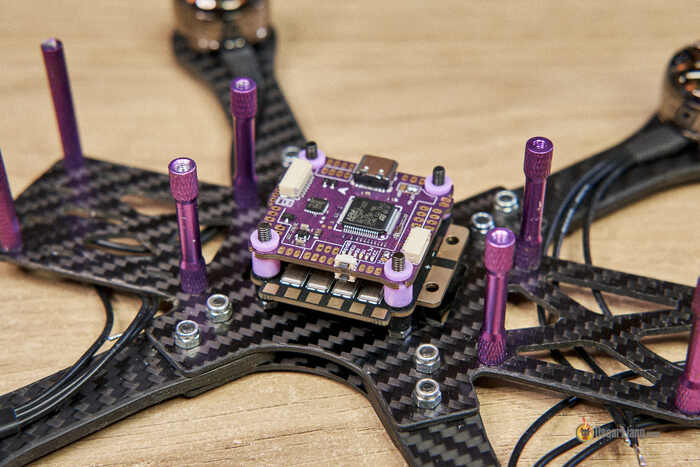
Без навыка пайки можно собрать полностью раму: убедиться, что все детали на месте и понять где у неё верх, низ и так далее. Примерить как будут расположены внутренности, винты и проставки для регулятора и полётника, камера. Полётник и регулятор имеют свою предполагаемую ориентацию. Регулятор обычно ставится разъёмом вверх, батарейными терминалами назад, площадки под моторы по бокам. На полётнике есть стрелка - её устремляем вперёд. И смотрим чтобы USB разъём оставался доступен. Такое расположение полётника и регулятора не потребует дополнительных настроек. Если же по каким-то причинам они так не встают, то ставим, как встаёт, а перенастроить возможность будет, но это лишний шаг в настройке - лишний шанс ошибиться. Также важно, чтобы полётник не касался ничего жёсткого, рамы или, батарейного провода, а закреплён был только на своих мягких втулках.
Видеопередатчик ставим в заднюю часть рамы, следим за тем как будет располагаться провод антенны, он не очень хорошо гнётся. Крепление на стяжку видеопередатчика или на двухсторонний скотч приёмника - это нормальная практика.
Также нужно сразу перешить полётник на свежий релиз Betaflight, пока не сделано никаких настроек. И у нас наконец праздник - вышел релиз Betaflight 4.3, а это значит, что полетник перепрошивать обязательно. Для этого необходимо установить на комп Betaflight Configurator. Перепрошить аппу и приёмник ERLS тоже хорошая идея, софт - ExpressLRS Configurator.
Для успешной пайки нам необходимо:
1. Паяльник с регулировкой температуры. Хорошим решением является паяльник на жалах Hakko T12 (конкретно жало BC2 мне нравится больше всех). Там термодатчик установлен в жале, близко к нагревательному элементу и паяльник всегда выдаёт нужную мощность для поддержания заданной температуры.
2. Припой. Бывает с флюсом бывает без. Я люблю без. Это стандартный свинцово-оловянный припой в проволоке, например ПОС-61.
3. Флюс. Если не знаете, что такое - гуглите. Без него качественной пайки не сделать, даже нет смысла разговаривать. Меня устраивает KINGBO RMA-218 с али. Флюс не должен проводить, чтоб его не отмывать, и не должен проводить после нагрева (был такой, чуть с ума не сошли).
4. Тиски или "третья рука". Без этого всё спаять конечно можно, но времени уйдёт гораздо больше.
Технику пайки смотрите в других гайдах, уверен их полно. Для нас же несколько замечаний:
1. Мощность понадобится приличная - паять батарейные терминалы. Паяльник от USB не справится (есть такой).
2. Все провода и площадки облуженные с завода (то есть с нанесённым припоем) нужно разбавить своим припоем перед пайкой. На заводах используется бессвинцовый припой, его паять вручную не так удобно.
3. Лучше проводов с силиконовой изоляцией пока ничего не придумали. Если пришлось докупать, до берите именно в силиконовой изоляции. В идеале питание вести красным проводом, землю чёрным, сигналы другими цветами, при ремонте будет сильно проще разбираться.
4. Термоусадка. Без неё жизни не представляю. Срастить провод, или сделать разветвитель. Для пайки разъёма XT60 на провод применять обязательно.
5. До уровня брать на полетушки паяльник я пока не дорос, но те кто летают много, берут. Есть модели с питанием от аккума квада.
Главное - научиться отличать по внешнему виду плохую пайку от хорошей и не лениться переделывать, если пайка плохая.
Пайка провода к площадке выглядит так:
1. Зачищаем, если нужно, провод на необходимую длину.
2. Мажем флюсом провод и площадку.
3. Берём на жало немного припоя и лудим площадку (равномерно наносим припой на всю поверхность площадки).
4. Также лудим провод независимо от того лужёный он или нет.
5. Прислоняем провод к площадке с помощью тисков или третьих рук. Одной рукой прислоняем жало, второй добавляем припой.
6. Пайка должна равномерно растечься по площадке и быть круглой и блестящей. Если убирая жало сделали острый шип, добавить флюса на пайку и снова нагреть паяльником.
7. Припоя достаточно, если сквозь него не видно жил провода.
8. Флюс на жало никогда не наносится.
9. После пайки вытерли жало об латунную стружку или специальную мокрую губку.
10. Если паяем разъём XT60 к проводу, не жалеем припоя и пропитываем провод хорошенько, пока не станет очевидно, что в провод припой не лезет (за припоем не видно жил).
11. Если не можем разогреть крупную пайку, взять на жало припоя, пайку помазать флюсом, дело пойдёт быстрее.
12. Если залепили две мелких соседних площадки, чистим жало, мажем флюсом, греем залепу. Не помогло? Снова чистим жало, наносим флюс, греем. Рано или поздно жалом уберётся лишний припой.
13. Матовая бугристая пайка - плохая, не эстетически, а механически. Оторвётся и что-нибудь замкнёт.
Считаем, что паять научились и определились как и где всё будет внутри рамы расположено.
Что и с чем нужно соединить (пайкой или разъёмом):
1. Каждый мотор с регулятором. Пайка по три провода на мотор.
2. Полётник с регулятором. Шлейф на разъёмах или разъём и пайка отдельных проводов на полётник. Четыре провода на каждый сигнал для мотора, 5В питания полётника, напряжение батареи на полётник и земля. Минимум 7 проводов.
3. Приёмник с полётником. Земля, питание и сигнал: минимум три провода.
4. Камерe c полётником: земля, питание и видеосигнал. Минимум 3 провода.
5. Видеопередатчик с полётником. Земля, питание, видеосигнал, сигнал управления (протокол SmartAudio или Tramp). 4 провода.
6. Антенна на разъёме к видеопередатчику.
7. Батарея к регулятору на разъёме.
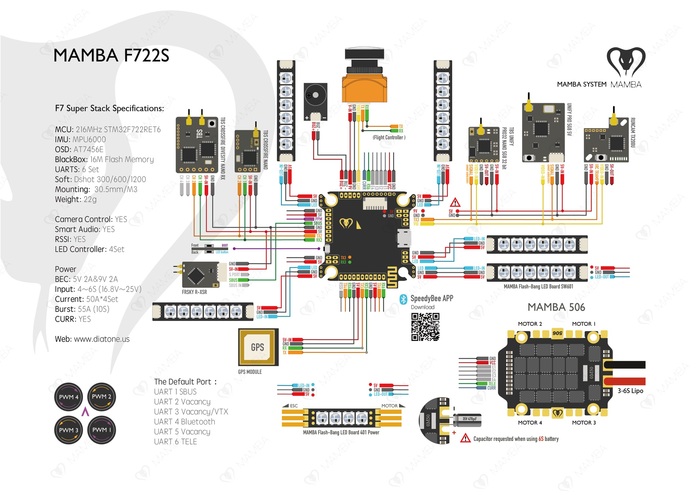
Это пример распиновки полётника, здесь показано несколько вариантов приёмников и несколько вариантов видеопередатчиков, в кваде будет по одному. Также расписана периферия, которой у нас нет: пищалка, GPS и светодиодные ленты
К регулятору паяем батарейный разъём, длину нужно рассчитать так, чтобы провода притянуть стяжкой к стойке рамы или к раме. При падении обычно улетает батарея, она дёргает за разъём и может вырвать терминалы с регулятора. Если провода притянуть к стойке, то терминалы не пострадают. Также паяем ёмкость к батарейным площадкам, хорошей идеей будет обернуть в термоусадку провода с конденсатором. Этот этап требует максимальной мощности паяльника и плохая пайка может привести как к отвалу батареи, так и к её короткому замыканию.
По пунктам выше подробно:
1. Прикручиваем 4 мотора к раме. Внимательно смотрим длину винтов, слишком длинные достанут до обмотки и мотор сгорит, слишком короткие плохо зацепятся резьбой за мотор и он отвалится в полёте. Очень хорошей идеей будет применить фиксатор резьбы. Ставим на своё место регулятор, желательно чтобы он не касался нижней пластины. Провода моторов ведём вдоль лучей и заводим за винты крепления чтобы к площадкам они подходили изнутри, то есть пространство между платой регулятора и полётника будет занято проводами моторов. Порядок пайки проводов на площадки не важен, хоть он и определяет в какую сторону будет крутится мотор, нам всё равно это настраивать в прошивке.
2. Если полётник и регулятор куплен комплектом, то соединяем их шлейфом и всё. Если же куплены отдельно, то нужно обязательно найти распиновки регулятора и полётника и убедиться, что шлейф из комплекта имеет верную конфигурация. Не полагайтесь на авось, стандарта нет, спалить электронику шанс велик. Можно переделать шлейф, аккуратно вынимая контакты из разъёма и вставляя в нужной последовательности. Иногда в комплекте есть шлейф с разъёмом на одном конце и с обжатыми проводами на другом, и пустой разъём. Наша задача собрать разъём согласно распиновки. На полётнике будут помимо разъёма отдельные площадки дублирующие контакты разъёма, можно использовать их.
3. Приёмник подключается к сигналу одного из интерфейсов UART. Так как он передаёт информацию, а полётник получает, то на приёмнике вывод TX нужно соединить с выводом RX# на полётнике (где # - номер UART интерфейса, который мы в прошивке потом укажем как SerialRX вход). Площадки питания и земли обычно рядом с одним из RX как раз для приёмника.
Причём площадка питания обычно обозначена как 4V5 и напряжение на ней появляется даже тогда, когда полётник подключен по USB, а батарея отключена. Это очень удобно при настройке в дальнейшем.
4. В полётнике площадка для камеры обозначена CAM или VIN. Провод видеосигнала желательно делать минимальной длины. Земля и питание также обычно рядом. Обратите внимание на диапазон питания камеры, он может требовать батарейного напряжения или 5В, выбирайте площадку соответственно, они обычно есть рядом. Камеру не забываем задрать вверх, угол можно сделать как в симуляторе, а лучше чуть ниже.
5. Для видеопередатчика обычно используется напряжение батареи, а управление также использует интерфейс UART. Тут уже полётник шлёт информацию на видеопередатчик и мы соединяем TX# свободного UART с площадкой которая может называться SA, SmartAudio, Tramp или как-то ещё. Также потом в настройках укажем что этот UART мы используем под протокол TBS SmartAudio или IRC Tramp. Площадка для видеосигнала обозначается VOUT, VID или VTX.
6. Антенна крепится обычно на смекалке, стяжках и изоленте. Ну или если есть сзади рамы крепёж под кабель, то цивилизованно. Без антенны питание на видеопередатчик лучше не подавать.
7. Батарея притягивается лямками (лучше две), под лямку можно заправить балансный и разъём питания. Вообще лучше сразу определиться с быстрым и удобным способом подключения батареи, её креплением лямками и фиксацией проводов и балансного разъёма. Этот ритуал нам повторять много раз за выход в поле. Под батарею иногда в комплекте есть нескользящая мягкая прокладка, если её нет, то рекомендую наколхозить. Работают силиконовые наклейки в обувь от мозолей.
Основная идея - сделать так, чтобы ничего лишнее не торчало за пределы рамы. Антенна при этом должна торчать прочно и не попадать в пропы.
Очень сильно поможет, как я уже писал, вести питание красным проводом, землю - чёрным, а сигналы цветным, видео обычно жёлтый и т. д. С другой стороны, если у вас разъём или компонент с красным и чёрным проводом, не поленитесь прозвонить и убедиться где питание и земля, у китайцев тоже бывают понедельники. Обычно земля приходит на металлические корпуса разъёмов и компонентов, металлизацию отверстий крепления, радиаторы. Если красный провод звонится на землю - что-то ту не чисто.
Многие рекомендуют покрыть всю электронику лаком, я тоже так делал, но ну уверен в эффективности затеи. Лак Plastik-71 как раз для этого создан, главное не залить кнопки и чип барометра на полётнике.
Однозначный порядок пайки и сборки указать не представляю возможным, всё индивидуально и собирать и разбирать квад иногда приходится по нескольку раз. Может не хватить проводов, винтов, проставок и прочего из комплекта и придётся что-то придумывать, докупать, колхозить. На этом этапе возникнет миллион вопросов не затронутых тут и я, как обычно, готов на них ответить в телеге ch347 - CHEAT:.
После сборки можно прозвонить разъём питания, он звониться не должен, но первую секунду может звониться, пока заряжается конденсатор от мультиметра. Хорошей идеей будет использовать так называемый Smoke Stopper.
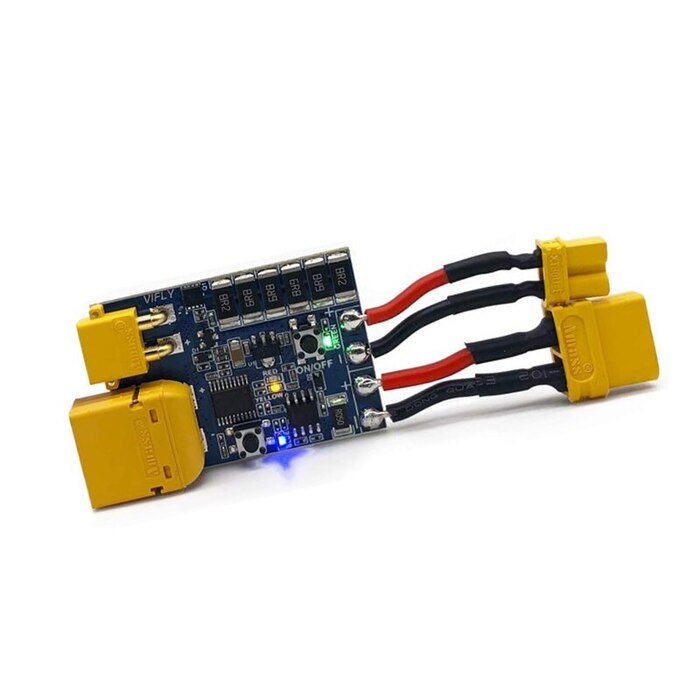
Через него первый раз подключается батарея и он не даёт сгореть электронике, если что-то напортачили.
Эконом-версия делается самостоятельно из автомобильной лампы дальнего света.

Подключение питания - ответственный момент, проверьте всё трижды, и, если всё собрано правильно, то квад пропищит моторами: три коротких и два длинных писка разной высоты.
В следующей серии мы будем квад настраивать.