


Робот пылесос своими руками. Почти "финишная прямая"
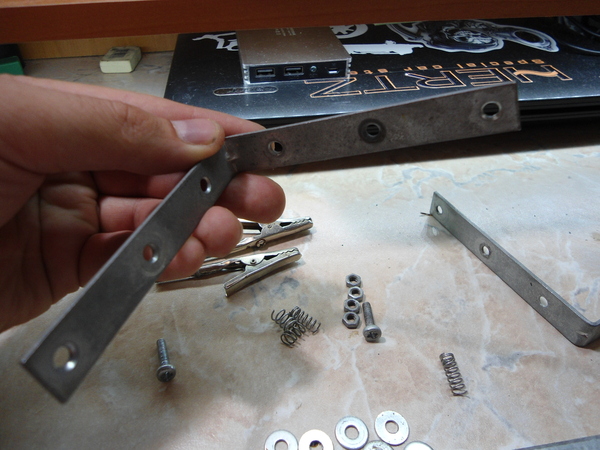
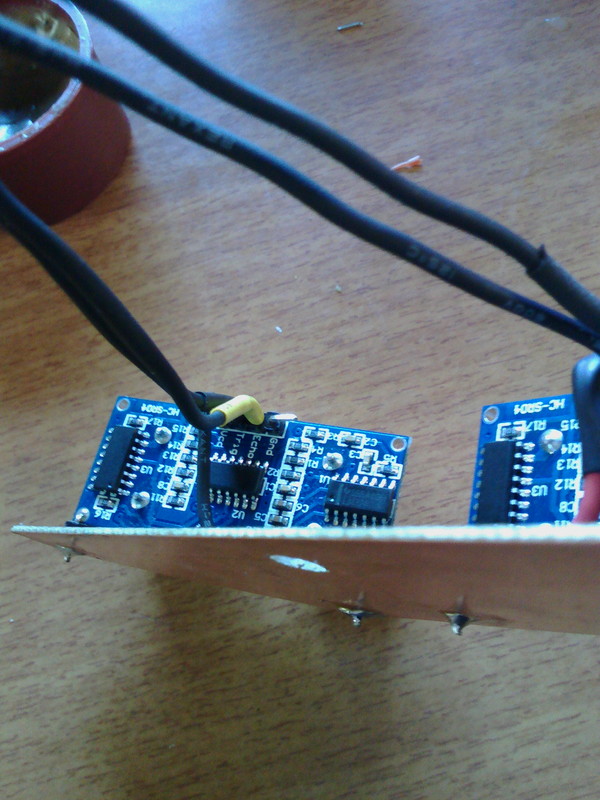
Наконец то долгожданные датчики приехали. Заказывал обычные ИК датчики препятствий и ультразвуковые дальномеры. Как оказалось у ИК датчиков косяки - они ложно срабатывают от яркого солнечного света и не срабатывают от препятствий черного цвета. Пришлось от них отказаться. Поэтому остались лишь дальномеры. Вся надежда была на них. Размышлял как их крепить. Решил припаять к текстолиту-подложке. Примеряем к заготовке...

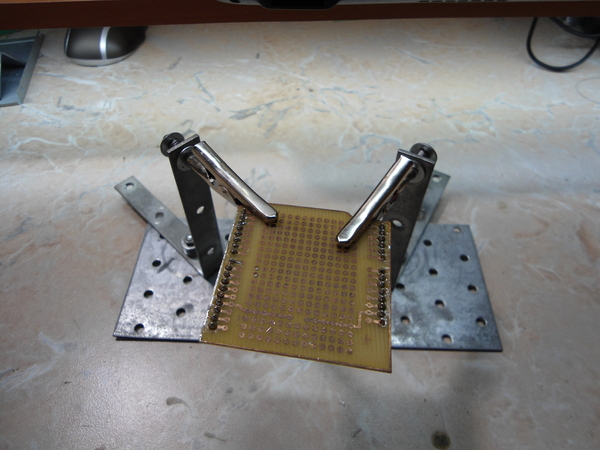
Решено! Паяем ....
И припаиваем шлейф...
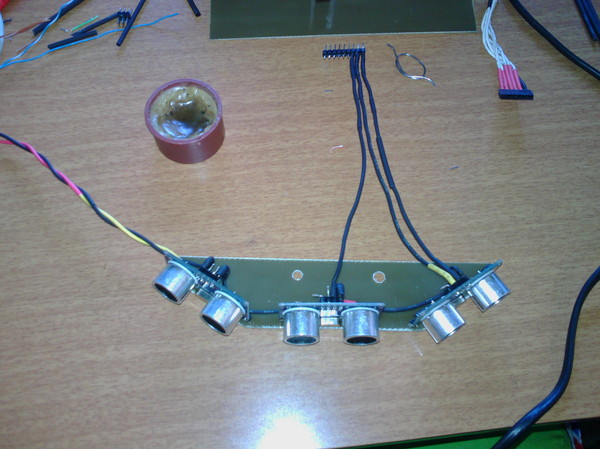
Закрепляем подложку так же пайкой...
И третий сорт не брак))))
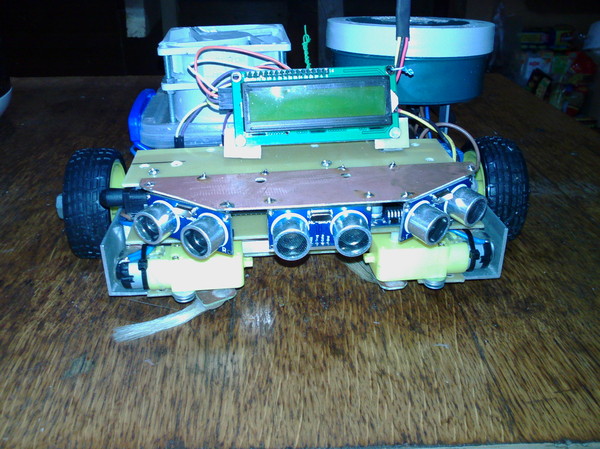
Видео пробного заезда
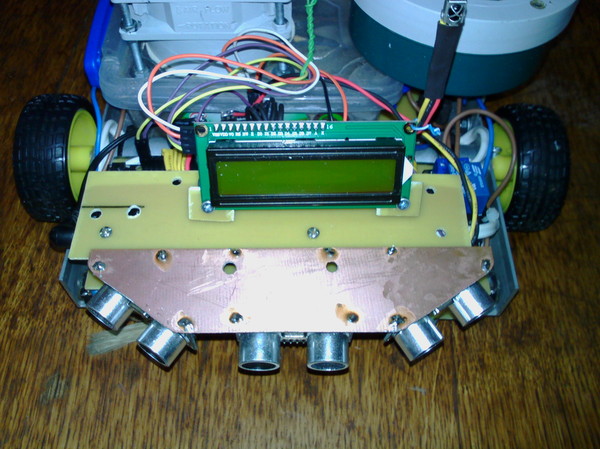
Есть два режима - ручной и автопилот. В планах добавить передний бампер с кнопкой для маневра , так как пропускает маленькие препятствия. Центральный датчик отвечает за скорость приближения к препятствию - чем ближе тем медленней . А боковые за обьезд препятствий. Алгоритмов передвижения пока нет (много идей ,нужно все испробывать на практике). Скетч сыроват, но вполне пригоден, по возможности прокомментирован вот ссыль https://yadi.sk/d/XudFGtkduYveB Не судите строго, все сделано на коленке и подручными средствами. Критика (ПО ДЕЛУ!!!) приветствуется и идеи тоже. Всем добра!!!