
Модификация kingroon kp3s
2 поста
2 поста

6 постов
Первая часть
Так, продолжаем разговор. Сегодня надо наконец собрать до кучи эту кучу пластика, и разобраться с электроникой, попутно вызвав не более трех демонов.
Напишу здесь, так как под первой частью было много недопониманий. Я не строю болид для ралли Париж-Дакар. И не для каких бы то ни было еще соревнований. И вообще ни для чего. Я инженер, но не сказать что лучший, или даже хороший. Это просто развлечение на свободное время, в стиле "а что будет, если попробовать?". Единственная цель сего мероприятия - убить время, дальнейшая судьба проекта - разбор на запчасти (возможно, с использованием молотка, для обретения душевного спокойствия) с последующей утилизацией.
Первым делом, надо разобрать все то, что так тщательно собирали в прошлый раз. Ну ладно, почти все.

Больше винтиков богу винтиков!
С одной стороны, полностью разборная конструкция дает массу преимуществ. Не так много сложных и крупных деталей, в случае поломки можно легко заменить только конкретно отзлебнувший элемент, легко править косяки и производить модификации.
Но черт возьми, как же я замаялся крутить эти чертовы 68 винтов... Да, можно было бы сделать и поменьше... Хотя я плохо представляю как.
Так как наша цель - подрамники, значит, придется скидывать рычаги, значит откроется отличный доступ к моторам...
Воспользуемся советом из комментариев, и поменяем провода питания. Я как раз нашел оригинальные от этих моторов, совершенно случайно...

Паяем провода, да покрепче, с обратной стороны зачищаем и обжимаем клеммы ншви. Просто потому что я так хочу, и никто мне не запретит. И так удобнее.
Повторяем четыре раза, затем долго и упорно закручиваем все обратно, пару раз забываем сначала собрать, а потом прикрутить амортизаторы, путем лево с право и в итоге получаем результат как в конце прошлой части, только лучше.


Едем дальше. Еще на моменте моделирования, я заложил по середине рамы монтажные отверстия, подразумевая что потом на них встанет ну хоть какое то подобие кузова, или подрамник для электроники. Получилось ни то, ни другое, просто белая пластинка с отверстиями, на глаз подогнанная под размеры будущих "мозгов".
Итак. Давайте теперь поговорим про управляющую электронику. Сейчас просьба всем хоть чуть чуть шарящим и понимающим, а так же особо чувствительным, закрыть нафиг этот пост. Я предупредил.
Чем мы можем заставить какую либо робототехническую платформу нас слушаться? Есть пара тройка вариантов. Первый, это одолжить у друга специальную аппаратуру для управления моделями, типа такой:

В теории все просто, минимум геморроя, главное все правильно подключить - и вуаля, у нас есть детская машинка на радиоуправлении. Но. Эта штука стоит денег. Для кого больших, для кого не очень, но все же стоит. У меня ее нет, покупать не хочу, а тот самый друг уже пол года как отдает долг родине... Поэтому не вариант, для нас.
Следующий вариант - экзотически-извращенский, я бы сказал. Купить в магазине самую простую машинку на радиоуправлении, распотрошить, и вставить потраха в наше поделие. Объяснять, почему так себе идея, надеюсь не надо?..
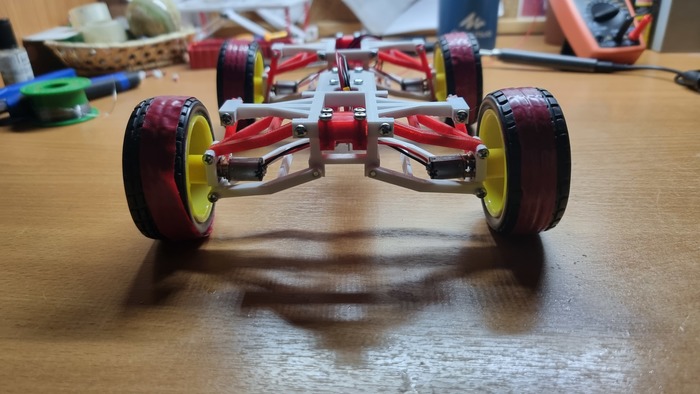
И вот, самый популярный, распространенный, и многими (в том числе и мной) любимый способ - Ардуино.
Имеем туево кукуево вариантов плат, модулей, форм факторов и тд. Даже языки программирования разные, и тут пожалуйста! И вот совпадение, у меня есть парочка.
Дальше есть два пути. Первый - обвешать модель всякими разномастными датчиками, поломать голову над кодом, и заставить все это безобразие кататься автономно, по какой нибудь черной линии, или от стенки до стенки, с помощью датчиков расстояния, или еще как. Вариантов куча. Но мне как то не интересно.
Второй путь - дистанционное управление. Можно заставить платформу кататься, подчиняясь команда с пульта телевизора, при помощи ик-приемника. Можно заморочиться с радиоканалом, и привязать к ней какой нибудь пульт от другой модели, или специально купленный на али. Можно вообще подцепить ее к домашнему роутеру, и рулить через веб интерфейс с компа. Но мы пойдем путем попроще. Или не проще, просто тем, адептом которого являюсь я. Старый добрый Bluetooth. Скачиваем на мобилку какое н будь приложение для управления машинками, я пользуюсь этим уже давно, и меня все устраивает.
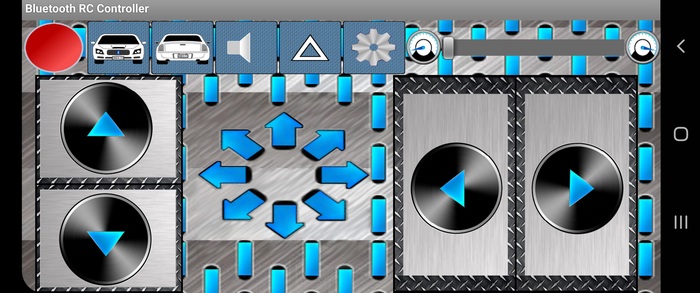
Открываем список команд, изобретаем код на 400 строчек, заливаем в нашу ардуйню, катаемся. Теперь непосредственно по железу...
Я пользую версию Arduino Leonardo от одной московской фирмы...

Уж не знаю что там по качеству, меня пока все устраивает, особенно улучшенная силовая часть, по сравнению с оригиналом. Сама по себе платка не потянет управление моторами, тупо сгорит. У все той же московской фирмы есть двухканальный драйвер моторов.
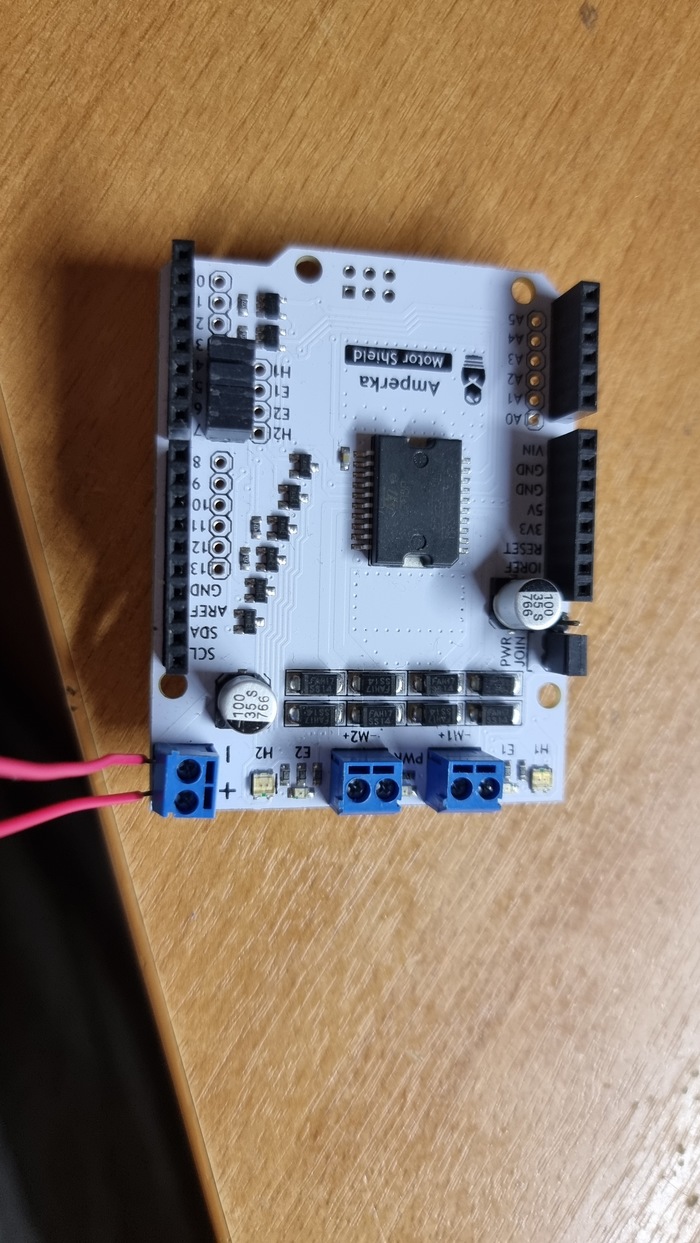
Она же позволит осуществить внешние питание всего и вся в нашей сборке.
А так же, для удобство монтажа всякой навесухи, да и вообще, докидываем плату расширения.
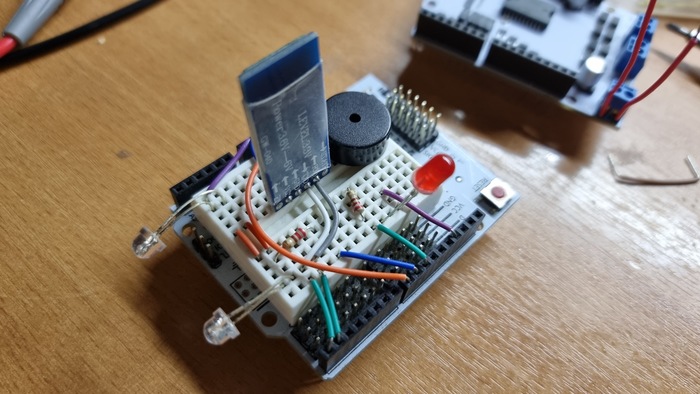
Из дополнительно прилепленного - пара светодиодных фар в стиле "улитка наркоман", красная лампочка, чтобы судорожно моргать в случае проблем, зуммер, чтобы делать бип бип, и модуль Bluetooth hc-06.
на всякий случай проклеим низ первой платы изолентой, все таки контакт с шестью металлическими винтами, мало ли...
Все это дело собирается "бутербродом" друг на друга, поэтому сначала закрепляем основную плату на раме, затем на нее драйвер моторов и тд.
Драйвер у нас двухканальный, а мотора четыре... Ну ничего, просто объединяем по два на канал, все равно при танковой схеме разницы нет. По идее так делать нельзя, но кто мне запретит. Да и нагрузки я проверил, должно выдержать. Должно.
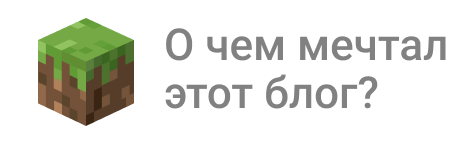
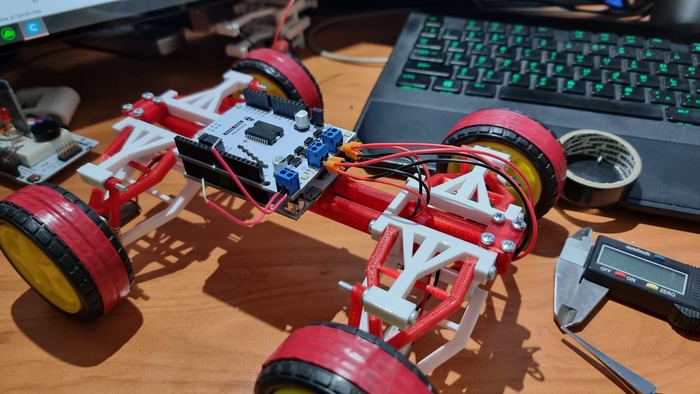
В общем, собираем, распутываем паутину проводов, находим косяк с креплением аккумуляторов (ну подумаешь, забыл, из нее де не стрелять...) и в итоге получаем вот такое чудо юдо:

Иии... Да. Оно работает. Даже ездит. И даже по искусственному рельефу из коробок прыгает, и подвеска вроде как отрабатывает, но... Оно не работает) Точнее работает, но с кучей очень больших но... И это все мои ошибки. Просчеты, неучеты, нехватка опыта. Бегло пройдемся по ним:
- крепление аккумулятора, его просто нет. Надо удлинять раму, чтобы раздвинуть подрамники и закрепить его за блоком электроники, чтобы не мешался, и центр тяжести был ниже.
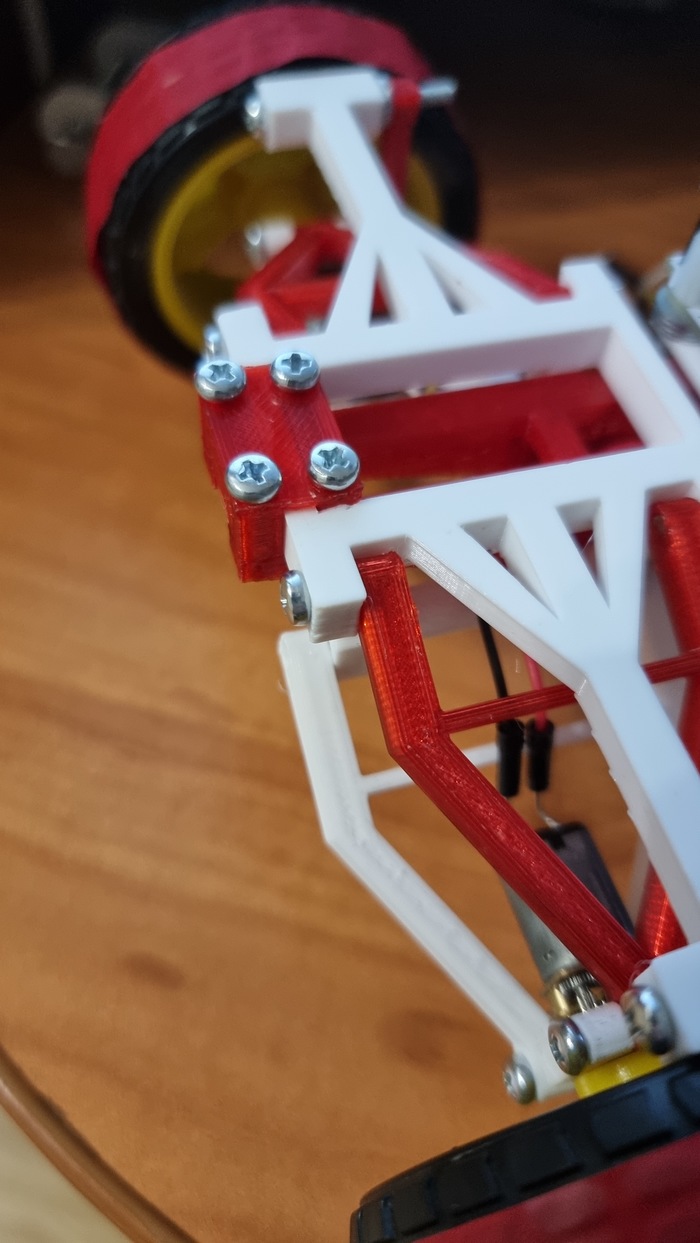
- я где то накосячил, не то в моделировании, не то в печати деталей, но в итоге что то не то с длиной рычагов подвески, и в итоге у нас получается отрицательный угол схождения колес, из за чего большая нагрузка на приводящие валы. Нужны новые рычаги.
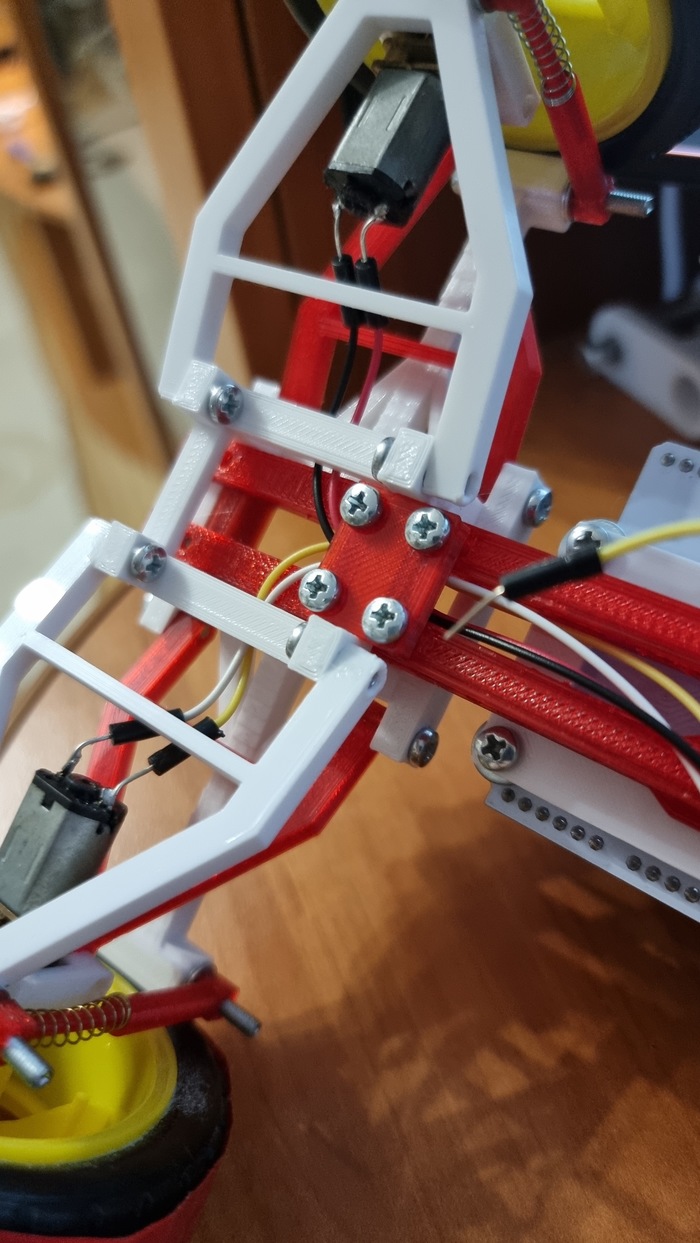
- на хорошем рельефе начинают разбалтываться моторы, возможно из за проблемы выше, но все таки я пришел к выводу, что нужны крепления.
- нужны другие колеса, вероятно печатные. Эти слишком тяжелые, и нет возможности нормально закрепиться на валу.
- телескопы подвески работают, но явно как то не так. Надо либо поколдовать с их длиной, но скорее всего проблема в так себе качестве поверхности для трущихся деталей, видимо надо печатать в плюс, и шлифовать.
Из очевидных проблем это вроде пока все. Не знаю, буду ли я это исправлять, или сверну проект... Зависит от настроения. Так же не знаю, буду ли выкладывать сюда дальнейшую судьбу этого поделия, посмотрим на вашу реакцию. Ну а пока мы встаем на импровизированный пит-стоп)

Новый день, новый аккаунт, новые мысли. Чтож, посмотрим, поменялось ли что нибудь на Пикабу за 5 лет.
И так, поехали. Есть план, собрать при помощи благ двадцать первого века, а именно систем компьютерного моделирования и 3D принтера прототип условной робо-машинки. Да по технологичнее. Самое простое - жесткая платформа, пара движков, колеса и айда в путь. Но так не интересно, хах) Из многолетнего опыта общения скажу, что зачастую, в модельках вообще нет системы амортизации, да и впринципе намека на хоть какую то подвеску. В принципе, на это можно и забить, в конце концов никого возить эти модели не могут, да и какой то острой необходимости в ней нет - по ровным полам ученических классов и лабораторий проедет все что угодно. Но не забываем, мы инженеры, и нам скучно.
Поэтому лезим в гугл, набираться опыта и знаний у старших коллег - машиностроения. Там все необходимые нам технологии обкатывают не один десяток лет, так зачем изобретать свой велосипед?
Из всего многообразия сразу выкидываем активные варианты с пневмоподушками или гидравликой. Как нибудь потом с ними поиграемся. Может быть.


Идем дальше. Варианты с рессорами тоже мимо - как минимум, это прошлый век, как максимум я плохо представляю как их грамотно распечатать...

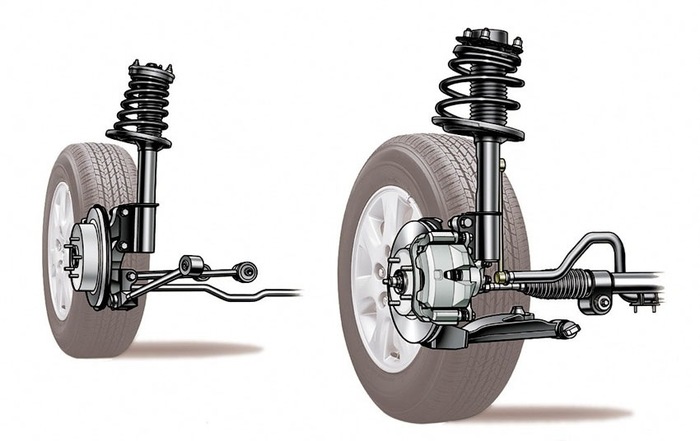
Макферсон. Выглядит привлекательно, но не слишком. Верхняя точка крепления стойки не вызывает доверия...
Ах да, мы смотрим исключительно варианты независимых подвесок, так как в движение наш аппарат будут приводить четыре 12миллиметровых мотор-редуктора, с что то там около 600 оборотов в минуту при 12 вольтах:

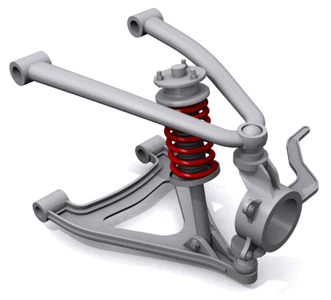
Так, прошерстив кучу автомобильных форумов, пришел к выводу о том, что самым простым и не запарным вариантом будет сделать двухрычажную подвеску. Все точки крепления (а их не так много, как у ее многорычажного собрата) можно увязать на одном подрамнике, никаких сложных деталей нет... Единственное что, вопросы вызывает рулевое управление и необходимость изобретения шаровых шарниров, так что пока выкинем его, куда подальше. В конце концов, танковую схему управления никто не отменял)
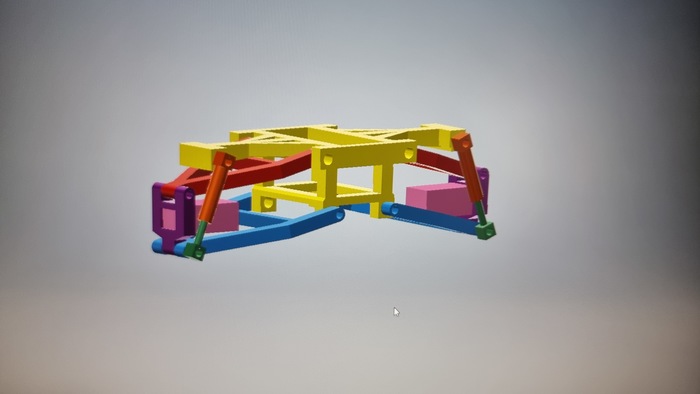
Так, с типом подвески определились. С трансмиссией, а точнее с ее отсутствием, тоже, так как моторы будут висеть непосредственно в кулаках и втыкаться напрямую в колеса. Заводим компьютер и вспоминаем что там преподавали на первом курсе... Inventor, твой выход.
Делать будем типа по умному, из кучи разных деталюшек. Обмеряя линейкой воздух прикидываем будущие размеры прототипа. Не маленькая штука получиться, шпионить на вряд ли получиться. Шучу.
Рисуем подрамник с симетричными точками крепления четырех поперечных рычагов, выводим "крылья" для крепления стоек. В оригинале стойки зачастую крепятся к кузову автомобиля, но у нас такого не предвидится, поэтому все к подрамнику.
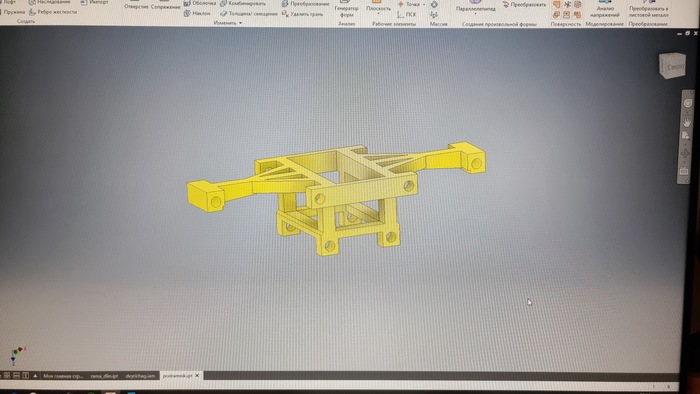
Тут кстати намечается один не кислый просчет... Изначально, по запаре, "крылья" были сильно длиннее, что будет видно потом на фотках. И это оказалось ошибкой, которая вылезла почти в самом конце...
Далее. Прикидываем под это дело рычаги, заранее расставляя их пошире, у нас же блин мотор прям в центре кинематики висеть должен. Кстати о нем: делаем кулаки, с посадочными местами под мотор. Крепиться будет при помощи жесткой посадки колеса. Да, не технологично, но на наш век хватит. Стойки амортизаторов - просто трубка и шток, входящий в нее. В качестве упрогого элемента будет то, что удалось достать проще всего - пружинки от авторучек. Смотрим чтоб нигде ничего не цепляло, делаем сборку, чтоб точно посмотреть, прикидываем условные моторы на свои места, чтоб точно все сошлось.

Не забывайте красить свои модели, хоть как нибудь - иначе в сколь крупной сборке тупо запутаетесь в серой массе.
Понеслась. Перекидываем все в слайсер, прикидываем цветовую схему, разогреваем принтер, печатаем.
Собираем на кучу всякой длины винтиков м3, они у нас и за оси, и за крепеж. Очень помогает знание того, как распечатать отверстие так, чтобы винт сам нарезал себе в нем резьбу и затянулся, или так, чтобы прошел плотно, но без закусываний(работал осью вращения)
Куча деталюшек, один прокос в печати, собираем, смотрим.
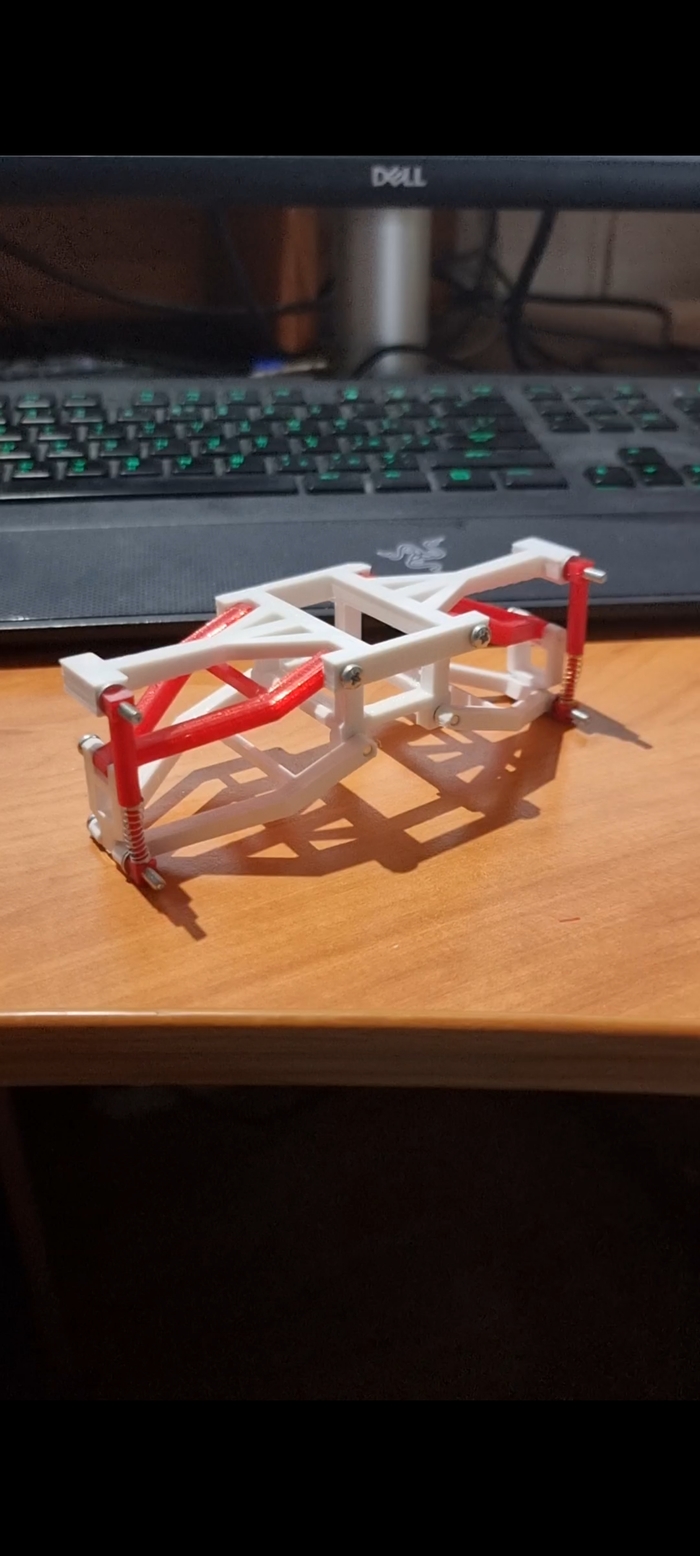
Здесь видно, что "крылья" длинные, и амортизаторы стоят вертикально. Это ошибка.
Аппарат будет симметричным, поэтому передняя и задняя подвеска - одна и та же деталь, просто перевернутая. Накидываем простенькую раму, которая будет соединять два подрамника, и на которой в будущем будет крепиться электроника.
Устанавливаем моторы с колесами, пока покупными, потом может быть перейдем на печатные. Печатаем раму, она будет крепиться к подрамнику специальными "хомутами".


Повторяем все операции, добываем из принтеравторой подобный узел, и ровно так же прикручиваем его к сборке.

На фото видно белую деталь, прикрученную посередине к раме. Это монтажная пластинка, на нее потом встанет электроника.
И вот в этот момент я понимаю, что что то не то, и что оба подрамника надо переделывать...
Так что пока принтер жужжит, вновь переводя пластик на новые детали, я удаляюсь. В следующей части (возможно) я доделаю эту штуковину, повесим мозги, питание, и покатаемся по какому нибудь рельефу. Но это не точно...
Upd: кому вдруг понадобятся модельки/еще чего, черканите в комментах или еще где, выложу

