




Жизнь-боль, когда в миске корма ноль.

Показать полностью
1

«Мыши плакали, кололись, но продолжали грызть кактус»
В этом году мне везёт!!! Я смогла снять этого вредителя на видео!!!


Автоматическая кормушка для животных "сделай сам" с wi-fi на ESP8266 IOT и BLYNK
Автоматическая кормушка для животных на ESP8266 IOT и BLYNK полная статья по сборке
Этот проект сделан на плате WIFI ESP8266 и заточен на управление и мониторинг через приложение BLYNK на вашем смартфоне .
Так же в проект можно добавить IP-камеру (или использовать старый смартфон с камерой в виде сервера) для мониторинга в реальном времени через IP Webcam Pro через виджет в приложении BLYNK .
Для подачи корма используется шаговый двигатель NEMA17 c шагом в 1.8 градуса - 200 шагов на полный оборот . Двигатель вращает шнек в сантехническом переходнике, в который из бункера попадает корм.


Порционность дозировки можно настраивать , а так же визуально отображать заполнение в приложении BLYNK

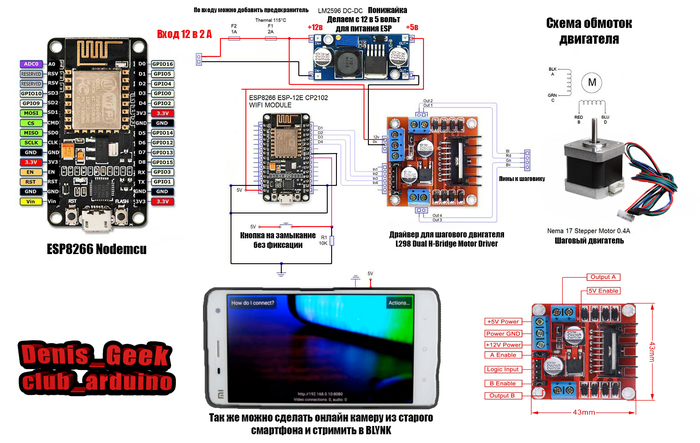
Схематика данного устройства весьма простая . Состоит из платы ЕСП8266 - которая служит мозгами , а так же средством связи с вашим вай-фай роутером ,передавая данные через спец. API ключ на сервера приложения BLYNK . Наши "мозги" управляют драйвером шагового двигателя , а он в свое время задает движение шаговику NEMA17 . Плата понижайка LM2596 служит понижающим модулем для питания платы ESP8266 .
Так же есть выносная кнопка на корпус , которая добавлена через подтягивающий резистор на 10Ком на землю - реализует функцию для запуска "кормления" в ручном режиме .
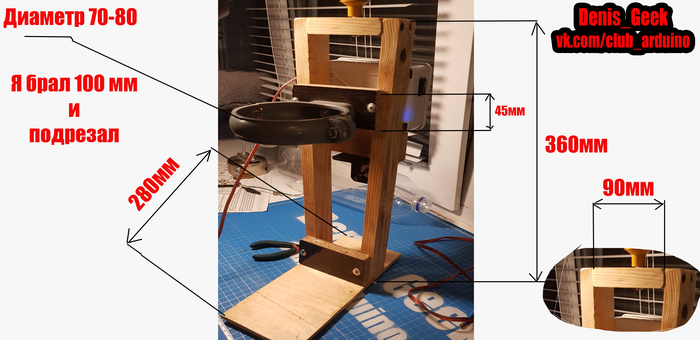
Сборка каркаса устройства с подручных средств и запчастей купленных в строительном магазине :
Прошивка,файл шнека под печать и настройки есть под видео на ютубе :
Показать полностью
5
1

Жиробарсик

Показать полностью
1

Котик олигарха

Показать полностью
1
