
Двухголовый
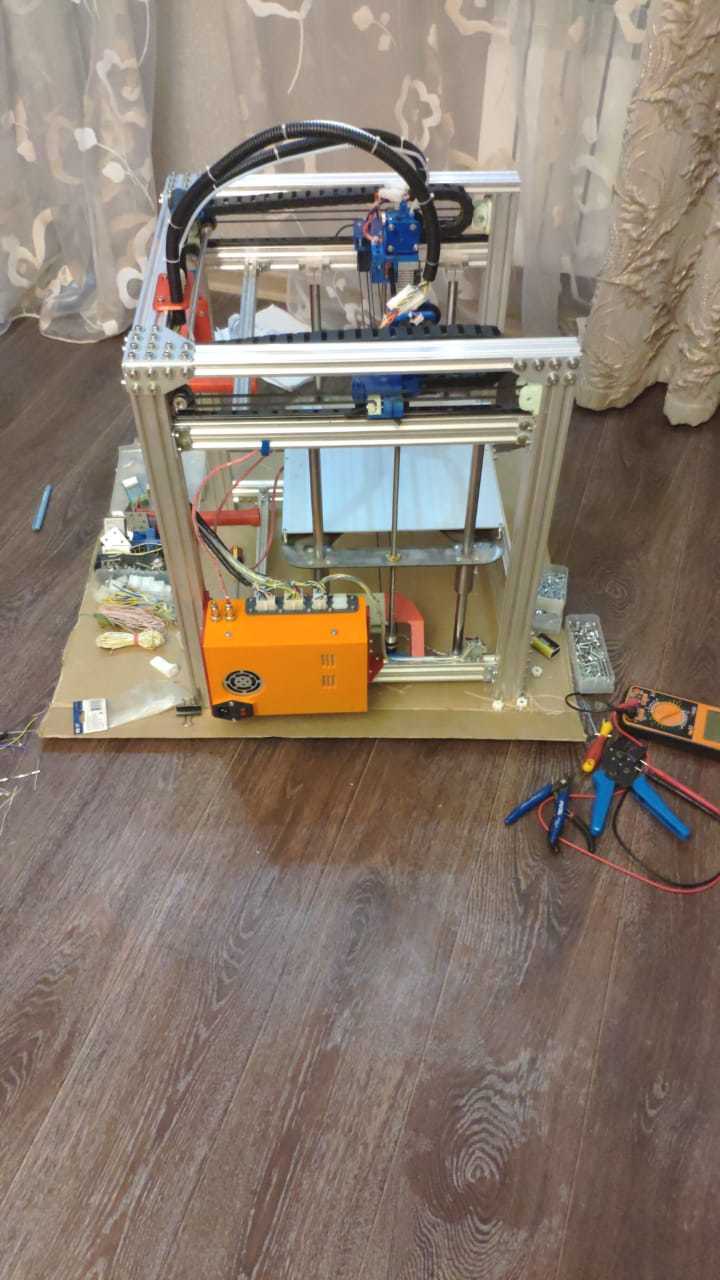
Третья модификация одного и того же принтера. Начинался он когда-то как H-bot, потом был кардиналь видоизменен в части механики оси Z (после чего забыли о перекалибровке), потом решили превратить его во что-нибудь грандиозное. Вот и родилось такое вот:
Краткая характеристика:
- кинематика: cartesian
- количество печатающих головок: 2 независимых (по типу IDEX) с возможностью параллельной и попеременной печати
- механика: оси XY - линейные направляющие Hiwin MGN12, ось Z - линейные подшипники на четырех полированных валах диаметром 16 мм по углам, ходовые винты - 2 шт в Xmin и Xmax типа T8x8, привод винтов - синхронизированный ременной от одного двигателя
- подогрев греющего стола - 600 Вт 230 В
- механизм подачи прутка - Direct, фидеры - самосборные самопечатные Titan
- хотэнды - Reprap
- рама - конструкционный профиль V-slot 4020х40, 20х40, 20х20
- печатные детали - экструдеры и детали оси X - поликарбонат PC, ось Y - ABS/PC, ось Z, держатели катушек и корпус электроники - PETG
- питание: БП - Meanwell 15 В 350 Вт
- управляющая электроника - Raspberry Pi3 + 2 комплекта Arduino Mega 2560+RAMPS1.5 для управления 3-мя нагревателями, 4-мя вентиляторами и 6-ю двигателями
- прошивка - Klipper + Octoprint
- драйверы ШД: X0 и X1 - TMC2208 (заказаны на замену 5160), остальные оси - A4988 (на Y планируется также 5160)
Все оси двигаются, принтер первично отстроен и поставлен на ночь на приработку механики оси X:
Следующий этап - калибровка и отстройка оффсетов между X0 и X1 и первая печать.
Планируемое дооснащение: закрытая пассивная камера рабочего пространства с установкой сорбционного угольного фильтра (принтер планируется к использованию в работе в офисе для печати опытных корпусов электроники).


Лига 3D-принтеров
2.5K постов12.1K подписчика
Правила сообщества
Запрещено хамство и оскорбления, уважайте чужой опыт и труд