

Аналоговый Амстердам
Немного пленочных карточек, Амстердам, январь 2019, olympus om-2






Показать полностью
5
Немного пленочных карточек, Амстердам, январь 2019, olympus om-2
Читаю посты некоторых людей, и прямо режет глаз использование - ться и - тся. Неужели так сложно задать себе единственный вопрос, чтобы написать правильно:

Если бы не дроны я вряд ли бы проснулся в 5 утра зимой)

Расскажу об устройстве гоночного/фристайл дрона по пунктам. В целом у остальных квадрокоптеров принципиальное устройство мало отличается но есть нюансы.

1. Рама.
Рама квадрокоптера это основа, его тушка, подавляющее большинство изгатавливают из карбона. Представляет собой корпус и 4 луча в различной конфигурации. Принципиально различаются между собой по нескольким параметрам: расположение аккумулятора на раме (сверху на спине или снизу под брюхом)


Различна также и форма схождения лучей, это или Х рамы или Н (если смотреть на раму сверху лучи или сходятся в центре, или же сходятся попарно право/лево)
Чаще всего рамы с верхним расположением батарейки называют "автобусами" из-за их длинного корпуса, а рамы с нижним - " крестиками" из-за их формы.
Соответственно ккрестики чаще применяют в гонках (легкие и юркие), а автобусы для фристайла (там нужна масса и инерция)
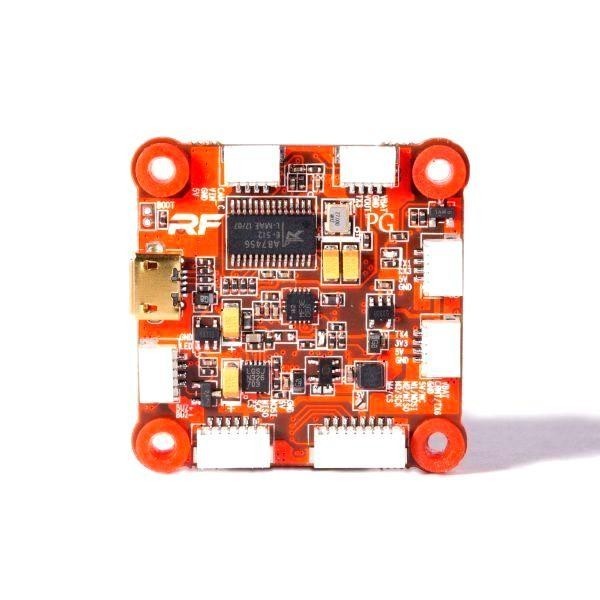
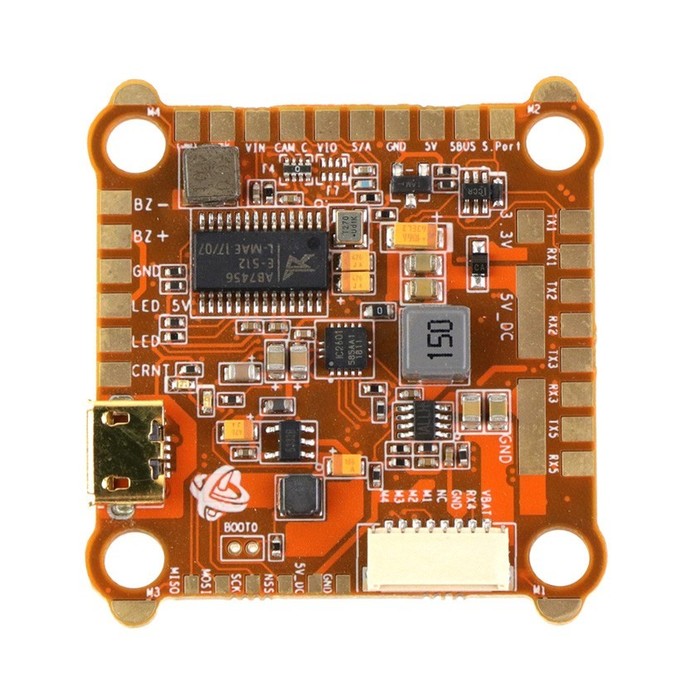
2. Мозги.
Или полетный контроллер. Та часть которая отвечает непосредственно за управление коптером и удержание его в заданном положении. Работают на основе PID (Proportional, Integral, Deriative) алгоритма (превед матан), далее на все это вешается куча фильтров (низкочастотный, режекторный, фильтр Кальмана, фильтр оборотов в минуту) для гашения вибрации моторов и шумов электроники. Основа любого мозга это процессор, в современных пк это камни серии stm32, самые первые были f1, сейчас дошли до f4 и f7 (на них можно запустить дум2). Далее идет гироскоп, самый распространенный гироскоп mpu6000 работает на частоте обновления цикла до 8кгц, иногда используют icm20602 поддерживающий обновление до 32кгц (кажется что быстрее=лучше, но с возрастанием скорости возрастает и количество шумов).
Ну ии всякие финтифлюшки вроде BEC, OSD, стабилизаторов питания и т.д.
Иногда в пк встраивают и плату распределения питания, это облегчает сборку, но иногда доставляет и проблемы.
3. Регуляторы оборотов.
Поскольку квадрокоптер летает на бесколлекторных электромоторах (не берем в рассчет игрушки) то им требуются регуляторы оборотов, в тонкости сейчас вдаваться не буду, скажу лишь что сейчас регуляторы также работают на 32битных контроллерах и в зависимости от нужд могут выдерживать силу тока 20-50а каждый (а их нужно по одному на мотор) и напряжение до 40в.
Существует ддва вида регуляторов:
Раздельные (крепятся на лучи рамы их нужно 4)
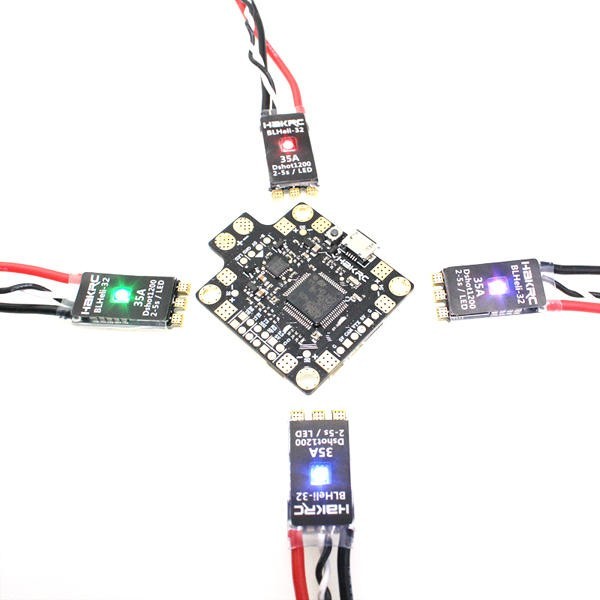
И 4в1, он ставится внутрь тушки
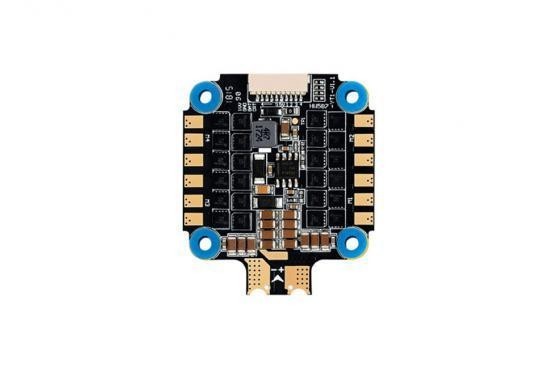
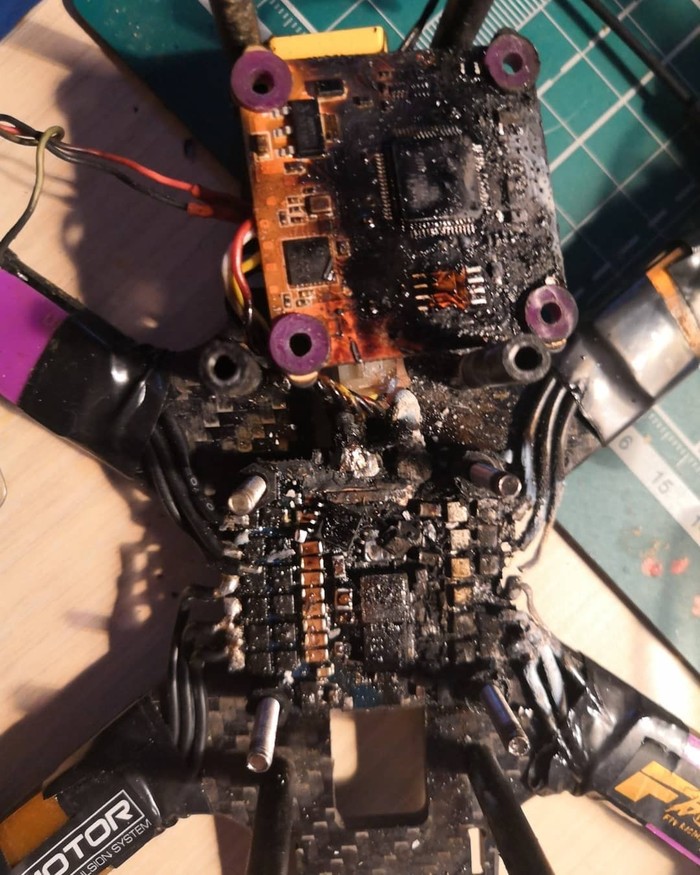
Разница в удобстве монтажа, но если горит регулятор (да, бывает) то раздельный горит сам и ничего не повреждает, а 4в1 создают печку внутри коптера))
4. Моторы.
Самая ссуть и мощь гоночного дрона)
Как ии говорил, моторы бесколлекторные трехфазные. В современном мире используют размеры моторов 2205/2206/2207/2306 (это размеры статора мотора), они имеют тягу до 2,5кг и потребляют до 50а тока каждый (при общем весе коптера около 600-650гр представьте какая у него динамика), это маленькие болиды формулы 1

5. Пропеллеры.
Тут особо сказать нечего, пропеллер он и в Африке пропеллер. Двух/трех/четырехлопастные с фиксированным шагом, диаметром 5-6дюймов. Их четыре)

6.аккумулятор.
Литий-полимерные аккумуляторы емкостью 1000-1800мА с высокой токоотдачей и количеством ячеек от 3 до 6 (от этого зависит напряжение батарейки 12-25в, могут обеспечивать ток до 200а, но короткое время.
Главный вопрос, долго ли летает? Ответ:3-5 минут

Это маленькие бомбы) кто видел как горят аккумуляторы тот поймет;)
7. Приемник радиоуправления.
Нужен чтобы коптер понимал команды от пилота. Работают на частотах 2,4 ггц(чаще всего) и на расстояниях до пары км. Все чаще используют дальнобойные системы связи на 868/915мгц (большая длина волны=большая дальность=лучшая работа через препятствия)
Это тот необходимый минимум чтобы поднять дрончик в небо)
В следующем посте расскажу про систему FPV, что это и с чем ее едят)
Давно читаю разные новости про дроны и практически везде народ в комментариях не понимает сути дронов и их возможностей.
Поэтому я решил вас познакомить с этой крутейшей темой.
Надеюсь будет интересно)
Итак всем привет, я пилот фристайл дрона, и я буду рассазывать об их устройстве, возможностях и новостях из мира дронов. В основном будут гоночные/фристайл квадрокоптеры, но не только)
Для затравочки видео одного из моих полетов на классическом фристайл квадрокоптере:
Начнем с азов:
Итак, классический вид квадрокоптера это тушка с кишочками от которой отходят 4 луча с расположенными на них моторами и пропеллерами.

Пилот управляет квадриком при помощи аппаратуры радиоуправления, контроль положения квадрика в пространстве бывает двух разновидностей
1. Визуально или LOS (Line of sight), когда пилот смотрит на квадрокоптер со стороны, но эта тема нас не очень интересует, гораздо интереснее:
2. FPV (First Person View), или вид от первого лица - на дроне установлена камера, видеопкредатчик, который транслирует видео в реальном времени, видео принимается (внезапно!) приемником и далее выводится на видеошлем или видеоочки - никаких VR технологий тут нет вопреки распрострененному мнению, это просто видео, причем для минимизации задержки до 5-50мс видео аналоговое, максимум 700тв линий.

Примерно такую картину, с небольшими вариациями, видит пилот:

Пока все, в следующем посте расскажу подробнее об устройстве квадрокоптера)