Эта статья специально пишется в момент поступления студентов и может быть поможет кому-то определиться с профессией, и конечно же, также хочу показать интересные моменты нашей профессии.
Вот ещё одну буровую для будущей работы на российском шельфе посмотрела наша команда. Полетели мы в полярный день в город Хаммерфест, что в Норвегии. Для представления где это, приложена карта ниже.
Для меня это как оказаться на родине, т.к. сам долгое время прожил недалёко от Мурманска, а вот коллегам было в диковинку, когда солнце не заходит за горизонт.
Тут это классно показано: http://pikabu.ru/story/letnie_nochi_svetlyie_ochen_5164664
Перелёт был сложный, в конце мы летели на таком чуде, где даже нет закреплённого за тобой места, и ты занимаешь его как в маршрутке. На самом деле самолёт очень хороший. Интересно, что в Норвегии самолетное сообщение есть практически везде, именно за счёт таких самолётов.
На этот раз мы проверяли ППБУ - полупогружную плавучую буровую установку.
Типа такой как на фото ниже (фото из интернетов). Это ППБУ "Songa Enabler" также работающая на норвежском шельфе.
Обратите внимание, что бОльшая часть вышки закрыта, якорные лебедки также укрыты, места сбора персонала защищены от ветра и осадков, это только то, что видно на фото. Ещё там есть паровые обогреватели и большая котельная установка. Все это в купе называется Basic Winterized class. Именно такой класс ППБУ, не забываем, что ППБУ в первую очередь судно, даёт возможность бурить в летний период на арктическом шельфе. Такой класс можно заложить сразу в процессе проектирования или провести винтеризацию буровой, если планируется такая работа в будущем.
Летели на буровую мы на вертолете. Ниже видео взлета такого вертолёта со стороны. Для защиты слуха от воздействия шума ты должен одевать наушники, а там, о чудо для российской вертолетной авиации, слышно что объявляет капитан и играет музыка.
Фото с борта вертолета, видно и ППБУ и Стационарную платформу.
Ниже фотография морской ледостойкой плавучей стационарной на натяжных опорах нефтяной добычной платформы. Для разработки этого месторождения как раз используют ППБУ на которой мы проводили инспекцию.
В данном случае со стационарной буровой не происходит бурение. Вокруг неё на дне установлены подводные добычные комплексы, рассчитанные на четыре скважины каждый, эти скважины бурит наша ППБУ. На фото ниже (из интернетов) показывает: желтые - ПДК (подводные добычные комплексы), сама стационарная ледостойкая платформа с натяжными связями, и райзеры (трубы) для управления скважинами и сбора нефти. На этом месторождении используются ПДК для кустового бурения, т.е. можно пробурить до 4-х скважин.
Наша ППБУ подходит на точку, где уже установлен ПДК и начинает бурить там скважину.
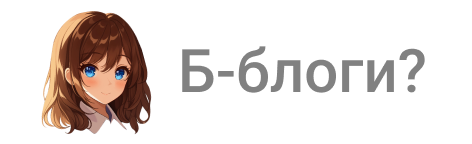
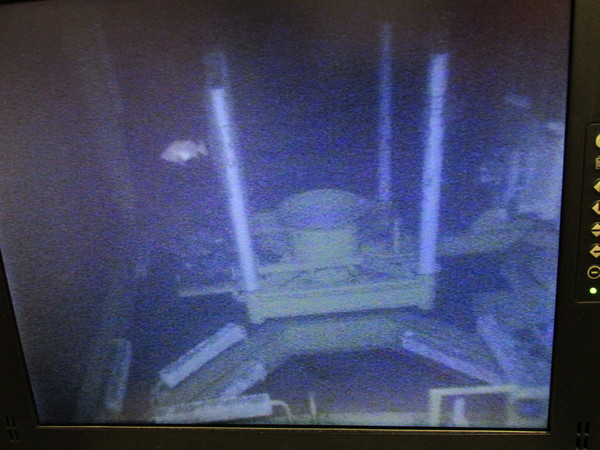
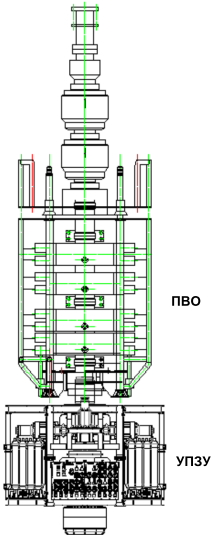
Вот так выглядит, установленные на дне в ПДК (фото сделал с мониторов пульта управления ROV):
1. Подводное противовыбросовое оборудование - ППВО.
2. Подводная устьевая елка, т.е. скважина уже пробурена и дает нефть на стационарную платформу.
3. Место под новую скважин.
Слева на право: Стационарная платформа, аварийно спасательное судно, нефтяной танкер.
Судно ТБС доставило часть нового оборудования и забрала выбуренный шлам с буровой.
Мой коллега показывает как будет находиться в воде на случай аварии на буровой в специальном термическом костюме. Эта модель с индексом Air, что означает возможность его использования при транспортировке персонала по воздуху и в частности на вертолёте. Интересный момент - при посадке в вертолёт в левое специальное крепление ты устанавливаешь персональный маяк, который активируется если попадёт в воду. Тем самым значительно облегчит поиск людей при аварии.
Этот костюм ты одеваешь на берегу, в нем летишь на буровую, там он будет у тебя как индивидуальное спасательное средство, в нем ты полетишь обратно и сдашь его только на берегу.
Ниже интересное видео того, как работает современный подводный дистанционно управляемый аппарат - ROV. Обратите внимание, что роботом управляет один оператор в кресле, а манипулятором другой. И вот устройство управления манипулятором самая интересная часть, это уменьшенная копия манипулятора, установленного на самом роботе. Оператор задаёт движение на поверхности и с минимальной задержкой, которая обусловлена расчётом траектории движения, манипулятор на ROV повторяет его. Расчёт движения необходим для того, чтобы исключить повреждение как робота так и манипулятора. Это хорошо показано на видео ниже.
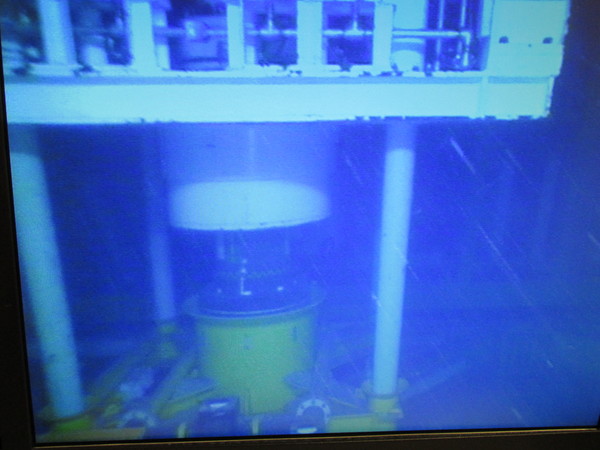
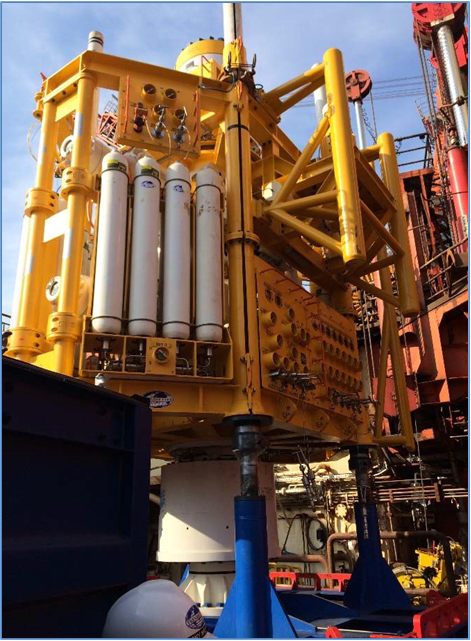
Так выглядит сам робот ROV. Правая от нас рука служит для захвата роботом неподвижное поверхности, что бы можно было левым от нас манипулятором эффективнее работать.
На буровой кстати был прямой телефон к НЕМУ.
Буровая, на которой мы были является Dual Activity Rig, т.е. у нее есть две буровые вышки, одна - основная, другая вспомогательная.
Ниже вы можете видеть основную, тут идет процесс бурения скважины. На фото видно: по центру бурильная колонна, слева от нее желтый - автоматический буровой ключ, справа вдалеке автоматический манипулятор перемещения труб.
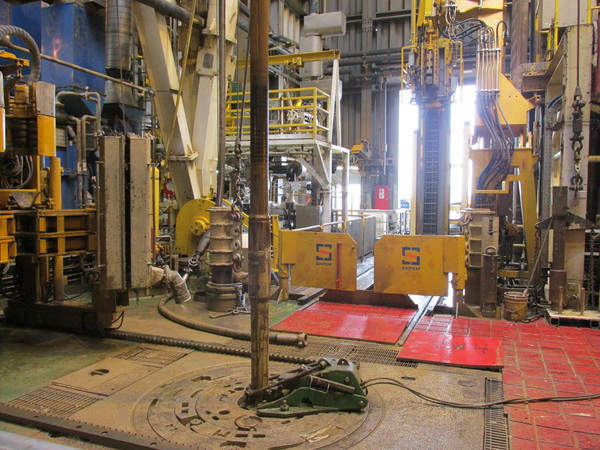
А тут вспомогательная, идет процесс свинчивания свечей обсадных колонн. Используя две вышки одновременно, мы значительно увеличиваем скорость бурения. Тут вы можете видеть слева красный автоматический ключ для свинчивания обсадных труб, помбура в белом.
Это сдвоенная кабина бурильщика. Из нее бурильщик и помощник бурильщика, сидя в кресле, управляют процессом бурения скважины. Соответственно на каждую вышку свои два человека.
И вид изнутри. Весь процесс максимально автоматизирован.
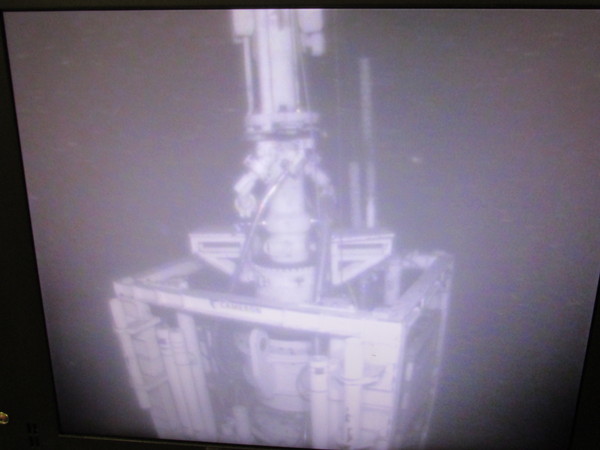
Просто красивый кадр, сделанный ниже главной палубы. Здесь видно натяжители райзера (желтые цилиндры), телескопическое соединение (от оранжевой штуки до верха фото), и сам райзер (белый ниже оранжевой штуки), колоны, которые соединяют верхнее строение с понтонам под водой.
Инспекция в среднем занимает 10 дней. Но это 10 дней быстрого темпа и 16 часовой смены. Написано будет 4 отчета. Общее впечатление от буровой очень положительное.
На этом интересности заканчиваются, мы выставили замечания и полетели домой писать отчёты.
Спасибо за внимание. Задавайте свои вопросы в комментах.