Робот на NodeMCU ESP8266 #3 Управление роботом при помощи гироскопа и акселерометра android смартфона

А наш робот уже управляется посредством гироскопов смартфона и в этом видео мы "выходим в поле" испытывать робота вместе с моими детьми.
Так как я не могу (пока) опубликовать тут видео, то вот ссылка на него: https://www.youtube.com/watch?v=O1Z91RXIv0I
Робот умеет плавно входить в повороты, так же он может развернуться прямо на месте.
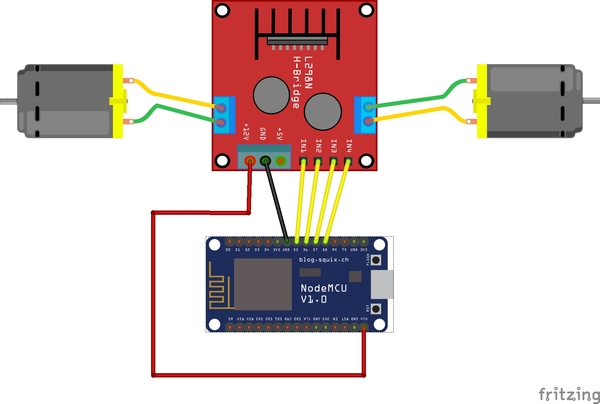
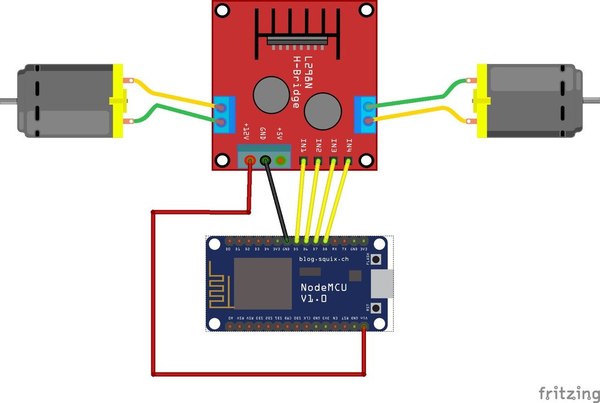
Напомню, робот построен на основе esp8266 NodeMCU а в качестве драйвера двигателей использован L298N.
Программное обеспечение написано мной и по вопросам связанным с ПО обращайтесь ко мне, я обязательно отвечу.
Схемы подключения и принципы работы сморите в прошлых моих видео
Скетч и android приложение качаем под видео на youtube https://www.youtube.com/watch?v=O1Z91RXIv0I
Показать полностью