Влияет ли микрошаг на момент шаговика? Опыт
Есть такая флеймогонная тема, про момент шагового двигателя - падает ли он при использовании микрошага относительно режима полного шага.
Сторонники полного шага утверждают, что при полном шаге в обмотки закачивается больше энергии, что при микрошаге больше "переключений напряжения и гистерезисных потерь".
Сторонники микрошага указывают на то, что в полном шаге вся закачанная лишняя энергия из-за имманентных недостатков шаговика все равно превратится в тепло, и что никаких дополнительных переключений в микрошаге не возникает.
Короче, воюют во всю.
Я уже в свое время проводил эксперимент, который показал, что микрошаг увеличивает момент относительно режима полушага - потому что меньше вибрации и резонанс. Но тогда мне не удалось тупо найти в доступности драйвер с полным шагом, это оказалось не так-то просто.
Теперь эксперимент повторен с соблюдением всех формальностей.
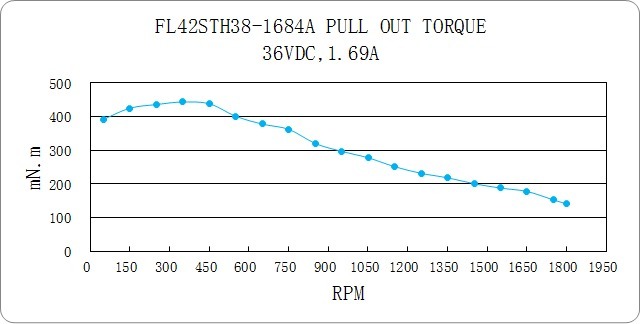
Американский драйвер Геккодрайва с полным шагом и 1:10, японский двигатель, тестирование на 3 скоростях - минимальной, средней(резонансной) и околомаксимальной.
Результат - микрошаг не оказывает влияние на малых скоростях, и увеличивает момент на высоких. В тесте увеличение до 2.5-3 раз, но мне кажется это просто хваленый морфинг геккодрайва сыграл вообще против него в результате.
Лига ЧПУшников
2.1K постов12K подписчиков
Правила сообщества
никакой политики