


Кибертрак На Управлении От Смартфона - Cybertruck NodeMcu Esp8266 V3 WiFI
Как сделать машинку кибертрак на управлении от смартфона на базе платы NodeMcu Esp8266 V3 WiFI.
Материалы:
- Старая машинка на радиоуправлении
- Плата NodeMcu Esp8266 V3 WiFI
- Транзистор PN2222
- Сервопривод SG-90
- Алюминиевые пластинки(8 мм)
- Смартфон
- Прочее
Скачать Приложение RemoteXY в Google Play Market или App Store.
Инструкция подключения смартфона к машинке:
После того, как прошивка загрузилась на плату, можно подключаться к смартфону. Для этого нужно подключиться к WIFI-сети RemoteXY. Затем нужно скачать и войти в приложение RemoteXY. Нажать на плюсик и подключиться к уcтройству с помощью точки доступа WIFI. После успешного подключения на экране появится элементы управления. Если всё правильно подключено, то при нажатии на кнопки, кибертрак начнёт показывать признаки жизни.
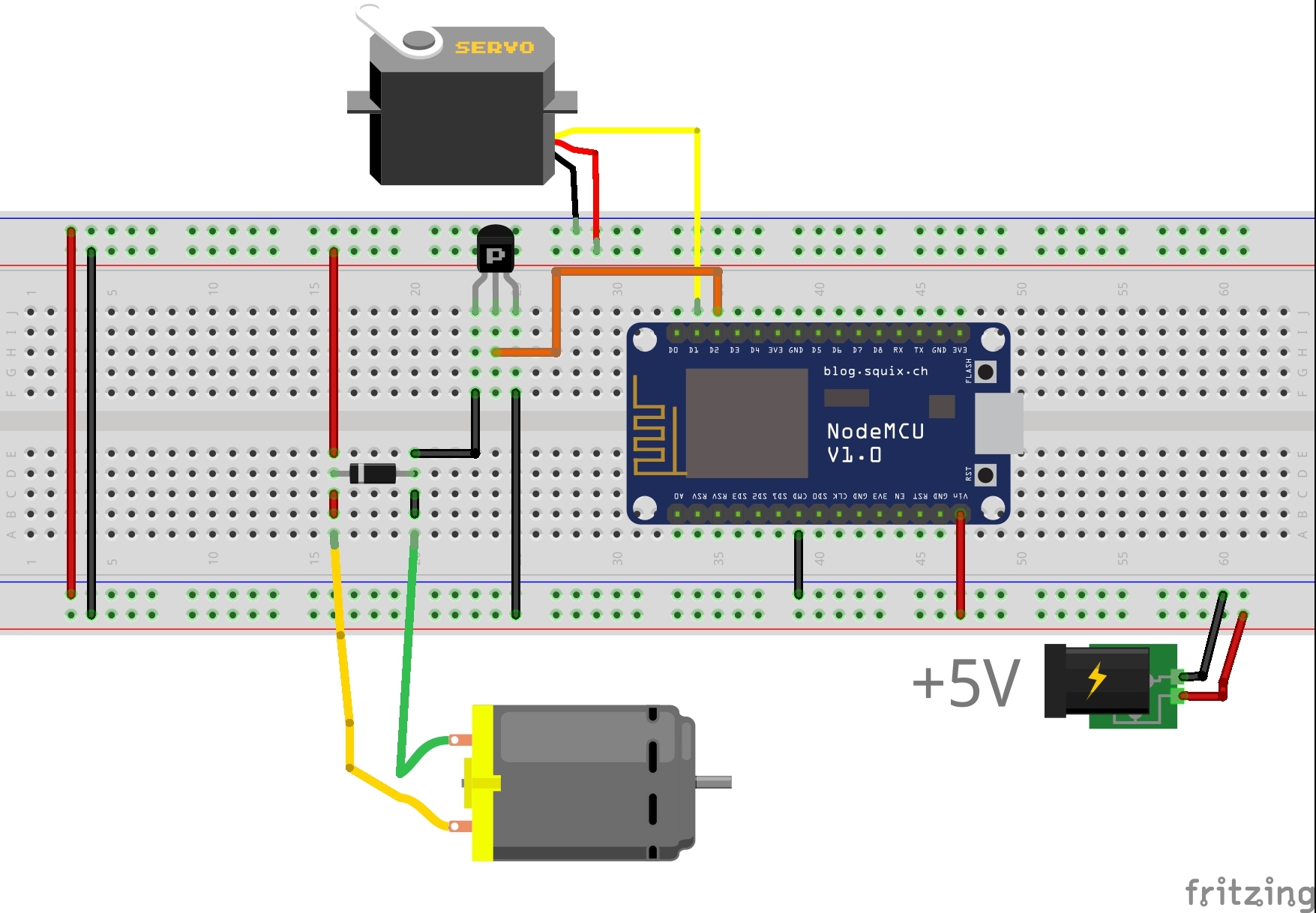
Базу транзистора нужно подключать к пину платы через резистор номиналом 10 Ом.
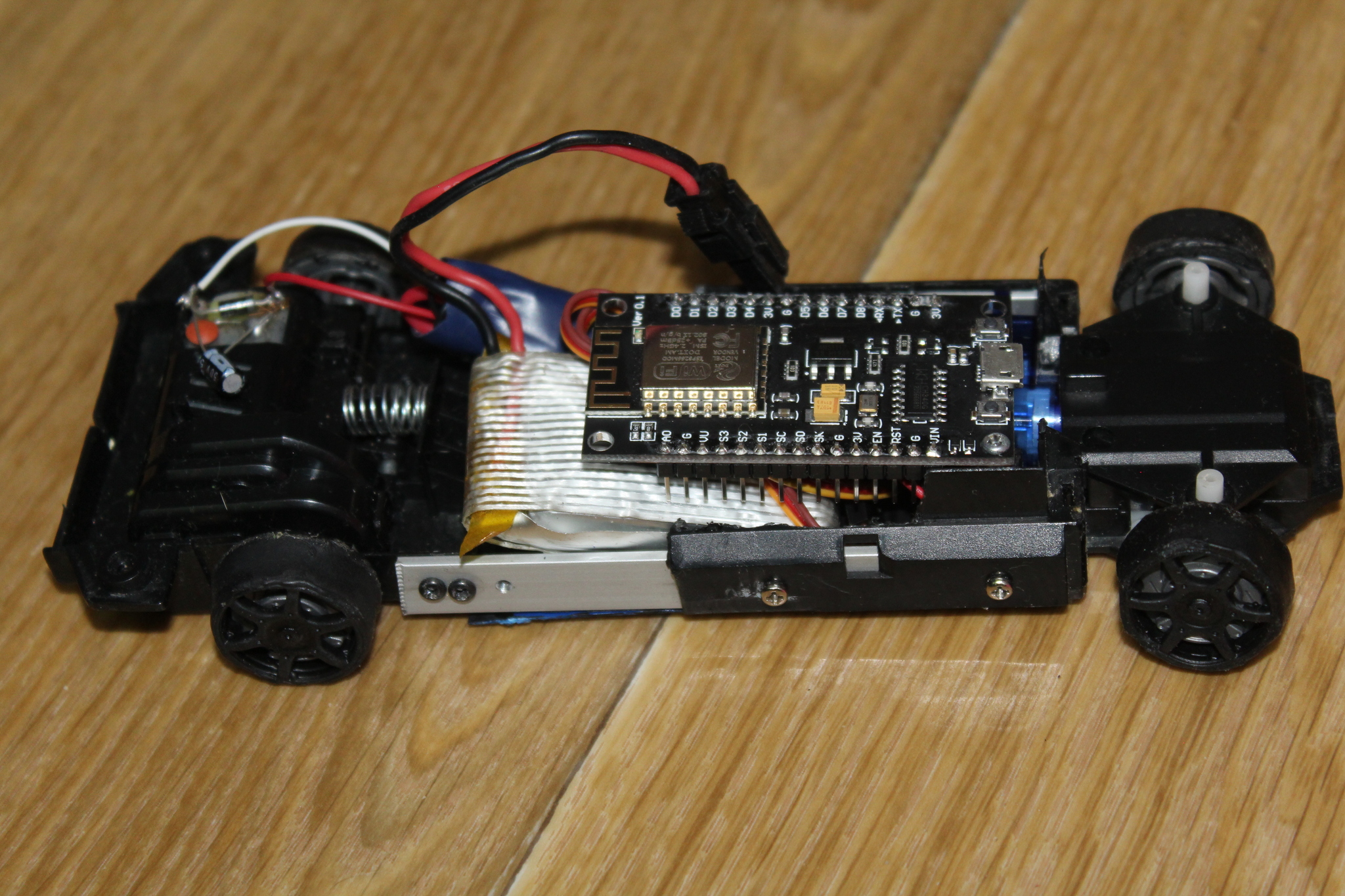
Основой кибертрака будет выступать старая машинка на радиоуправление. Пульт от неё был благополучно потерян, а хозяину скоро сдавать сессию). Поэтому можно сказать даём ей вторую жизнь. Для начала я её полностью разобрал. Затем с помощью зубной щётки и моющего средства хорошенько очистил от грязи. Задний привод я оставил прежним без изменений. Рулевую же часть я решил слегка доработать, заменив щёточный двигатель на сервопривод. Колесная база у кибертрака больше, чем у данной модельки, поэтому с помощью алюминиевых пластинок я её расширил.
Закончив с этим я приступил к электронной части. Мозгами пикапа будет выступать плата NodeMcu с встроенным WIFI чипом ESP8266. Для управления задним приводом буду использовать транзистор PN2222. В создании программного обеспечения мне помогла система RemoteXY, которая позволяет создавать графический интерфейс для управления контроллерами со смартфона. После того, как прошивка загрузилась на плату, можно подключаться к смартфону. Для этого нужно подключиться к WIFI-сети RemoteXY. Затем нужно скачать и войти в приложение RemoteXY. Нажать на плюсик и подключиться к уcтройству с помощью точки доступа Wifi. После успешного подключения на экране появится элементы управления. Если всё правильно подключено, то при нажатии на кнопки, кибертрак начнёт показывать признаки жизни. Так как всё успешно работает, я спаял все элементы по схеме. Транзистор я приклеил к алюминиевой пластинке, которая будет служить радиатором. Затем я скомпоновал всю электронику внутри корпуса. Кроме того снизу я приклеил дно. Проблемой оказалось то, что у машинки отсутствовали шины, поэтому я решил сделать их сам, использовав при этом термоклей. Затем для красоты я покрасил их чёрной краской.
Основная часть автомобиля готова. Теперь нужно сделать его кибертраком. И мы переходим к созданию корпуса. Вырезав и склеив из пенополистирола блок, я предварительно нанеся на него контуры, начал вырезать корпус с помощью самодельного станка для резки пенопласта. После этого я зашкурил всё с помощью наждачной бумаги. Кроме этого внутри корпуса я сделал полость для размещения там электроники. Также я покрыл корпус алюминиевым скотчем и сделал макеты окон с мощью малярной ленты и баллончика краски. Корпус готов. Для соединения его с основной частью я использовал маленькие гвоздик, приклеенные на суперклей.
Arduino & Pi
1.5K поста20.8K подписчиков
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Выкладывать код прямо в посте - используйте для этого сервисы ideone.com, gist.github.com или схожие ресурсы (pastebin запрещен)
• Рассуждать на темы политики
• Нарушать установленные правила Пикабу