Всем привет!
Пожалуй, начну свой пост с обращения к аудитории Пикабу в целом и к 661 человеку (кто до сих пор со мной, несмотря на моё поведение) в частности. Поздравляю всех с Новым годом и приношу свои искреннейшие извинения за то, что столько времени не постил, а также благодарю за терпение =)
По правде говоря, какое-то время назад меня начала сильно мучить совесть. Отдельное спасибо за это товарищам: @Bakut8536, @viktorq, @bacara1138 и @mr.Shify за то, что пинали меня, побуждая к действию.
Внимание, впереди очень много картинок))))
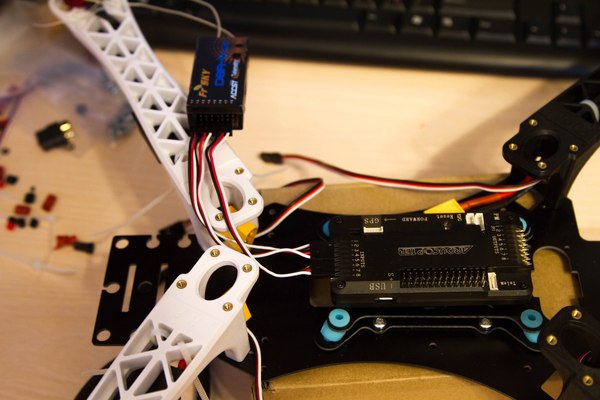
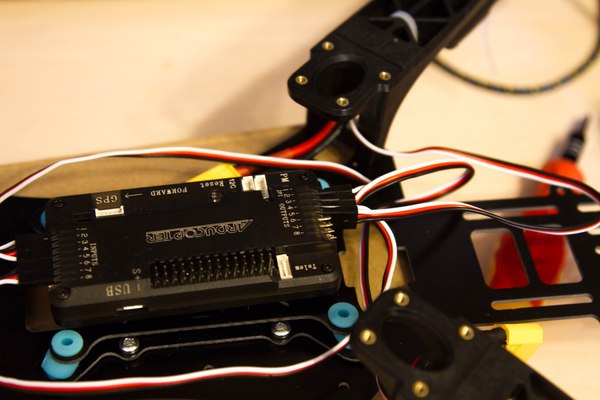
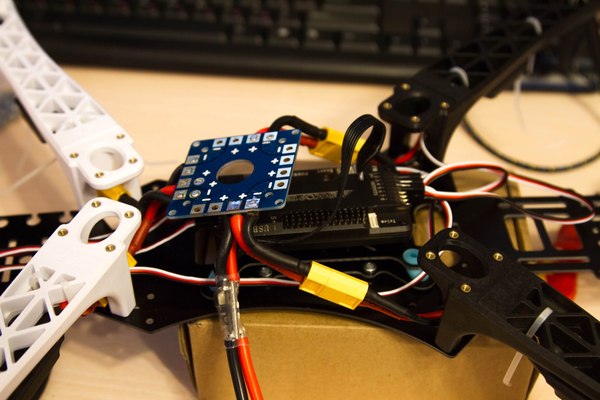
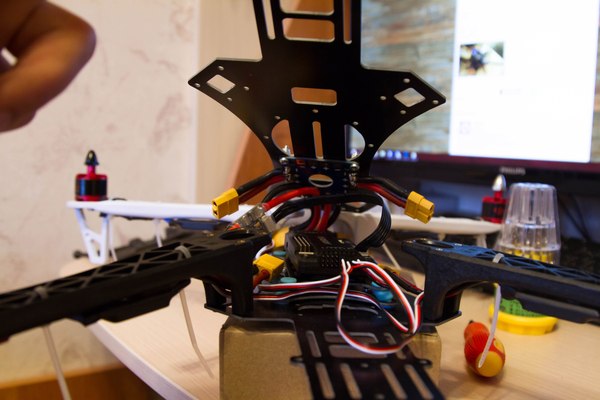
С предыдущего поста прошло очень много времени, теперь мой коптер выглядит вот так:
Что изменилось:
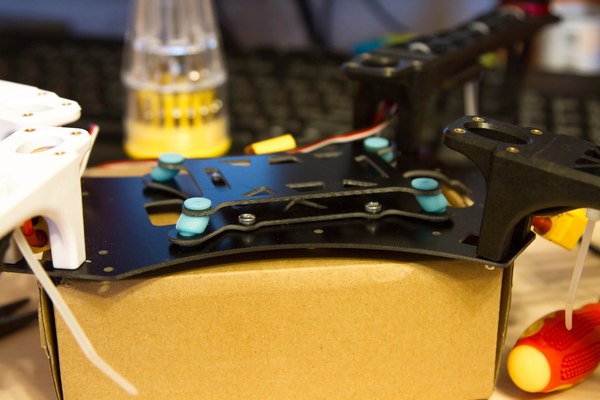
1. Рама - поменял на более легкую: во взлетной массе коптер потерял примерно 180 граммов, плюс развесовка стала более сбалансированной (аккум цепляется под низ, между штангами, @HellKern, я поправил =) теперь при прикреплении подвеса аккум можно сдвинуть к хвосту, и баланс всегда будет оптимальным);
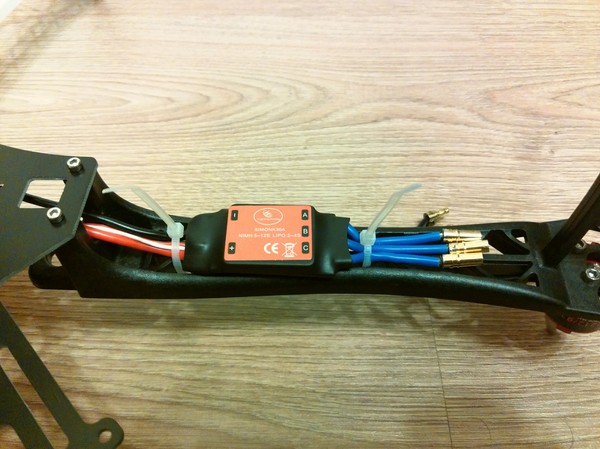
2. Регуляторы - да, многие говорили, что г@#но, и я сам в этом убедился: один очень быстро начал перегреваться и сгорел. По рекомендации @OTR1UM взял Hobbywing Opto 20A - работают без нареканий.
3. Моторы - на одном (или двух) нашел косяк изоляции (разное сопротивление между фазами), заменил на новые.
Остальное (чего немного) осталось тем же.
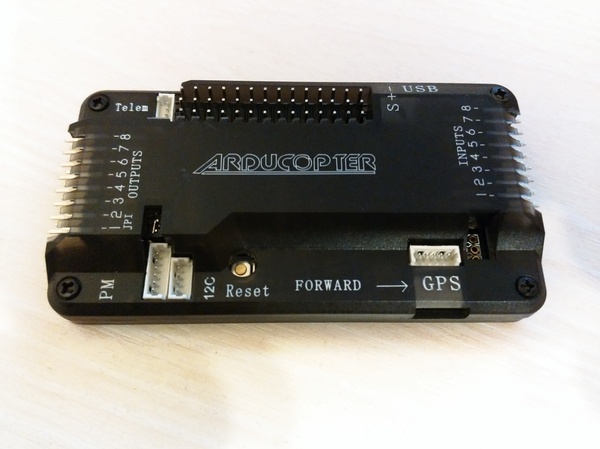
Итак, всё же часть третья. Колдовство с контроллером.
Для того, чтобы научить нашу "птичку" летать, нужно залить в контроллер прошивку и провести первичные калибровки. Для APM мы будем использовать программу Mission Planner.
Качаем, устанавливаем. Нужные драйвера должны встать сами вместе с программой.
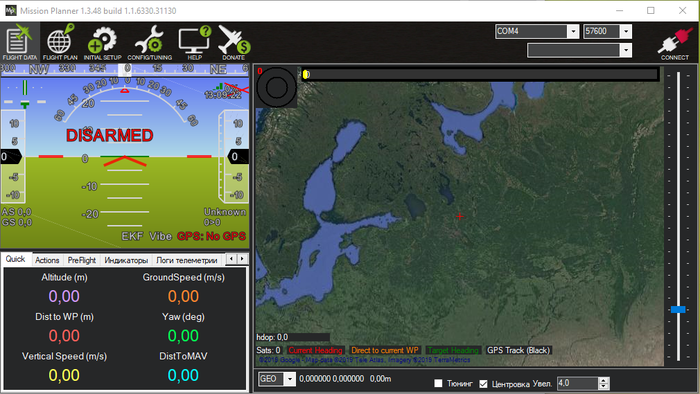
Запускаем планнер.
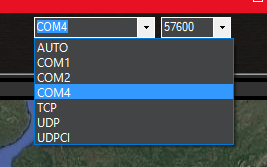
Так выглядит его стартовый экран. Пока все параметры в нулях. Подключаем коптер через USB, но НЕ НАЖИМАЕМ кнопку Connect. В выпадающем списке портов должен появиться новый. Также важный момент: подключайте напрямую к компу, а не через хаб.
У меня в компе своих два, поэтому новым оказался COM4. У вас может быть какой-либо другой.
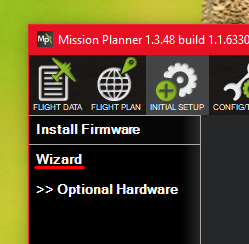
Нажимаем кнопку Initial setup, а затем кнопку Wizard.
Открывается окно, в котором у нас пойдет первичная настройка.
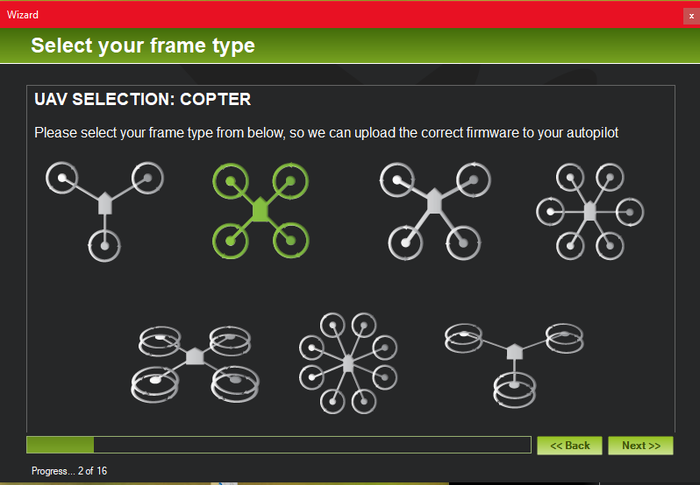
Шаг 1. Выбор типа нашего дрона. Здесь выбираем Мультиротор (думаю, без комментариев).
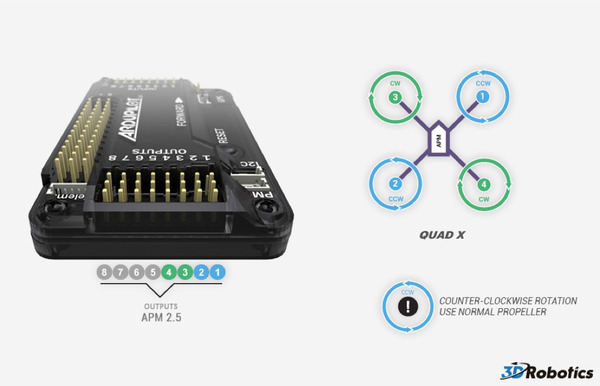
Шаг 2. Выбираем композицию. У меня классический типа X, квадрокоптер.
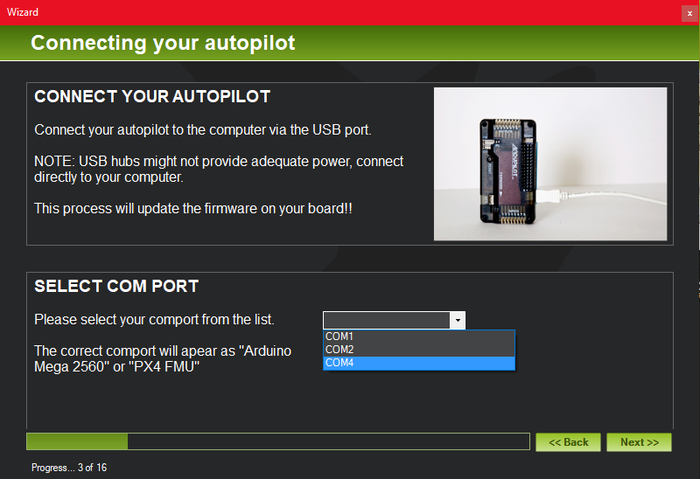
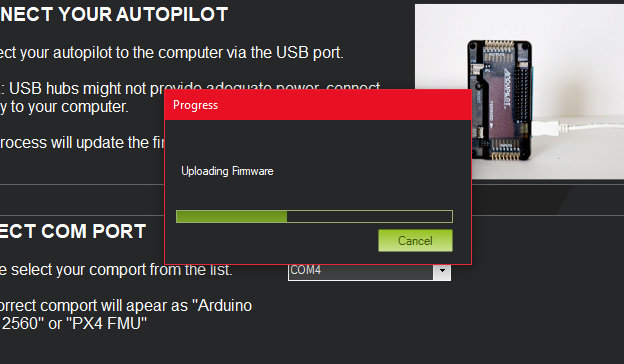
Шаг 3. Указание COM-порта. Здесь указано, что в диспетчере устройств COM-порт будет указан как "Arduino Mega 2560" (для APM) или "PX4 FMU" (для Pixhawk). Я заглянул в диспетчер - да, на 4 порте висит Arduino Mega 2560. Выбираем COM4, жмём Next, заливается прошивка.
При прошивке программа может сказать, что плата устаревшая, поэтому будет залита последняя выпущенная прошивка. Жмем ОК.
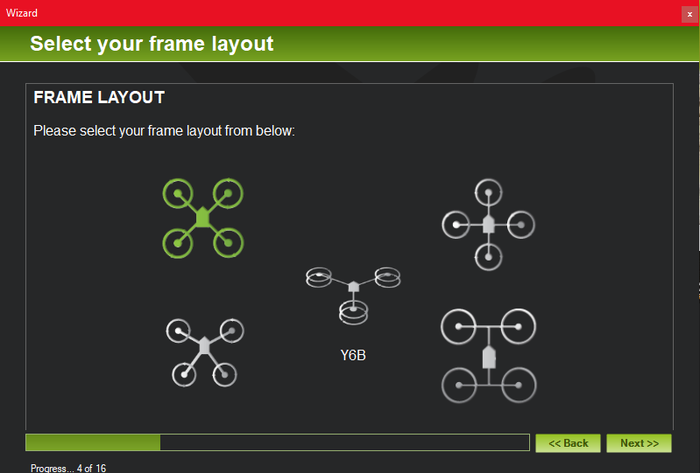
Шаг 4. Выбираем более конкретную раскладку коптера. Почему-то тот, что слева внизу, появился во второй раз о_О. Мой вариант - классический X-квадрокоптер.
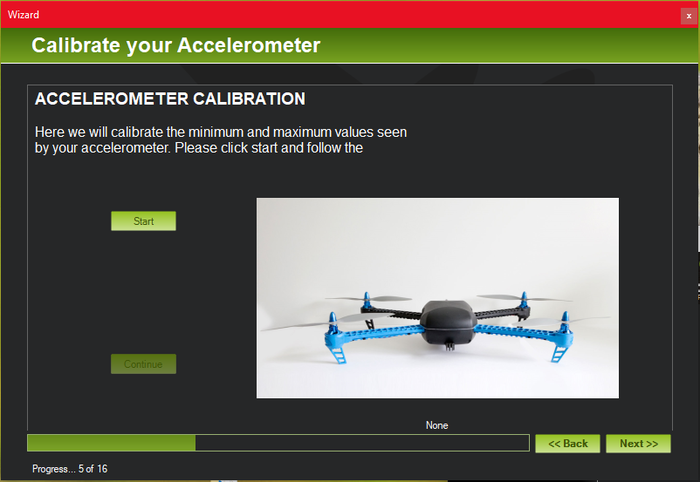
Шаг 5. Калибровка акселерометра.
Если у вас будет включен звук, то каждую манипуляцию вам будет наговаривать экранный диктор. Сначала было стрёмно, потом смешно))) Нажимаем Start. Появится надпись:
Нужно будет поочередно расположить коптер в 6 разных плоскостях (после каждого замера жмем Continue):
- горизонтально (ставим на стол или на пол)
- на левый бок (желательно прислонить его к чему-либо вертикальному, так будет точнее), я прислонял к компу или шкафу. Аналогично для правого бока, носа и хвоста.
- кверху брюхом (переворачиваем и прислоняем к столу снизу).
Главное - не делать больших задержек (больше 20с примерно) между замерами, иначе придется калибровать заново.
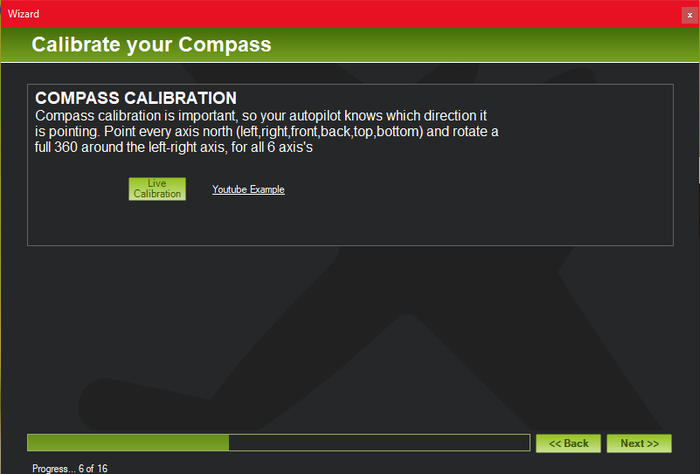
Как сделали - переходим к компасу.
Шаг 6. Калибровка компаса. Компас (у меня совмещенный с GPS) должен быть в "боевом" состоянии (то есть установлен и зафиксирован).
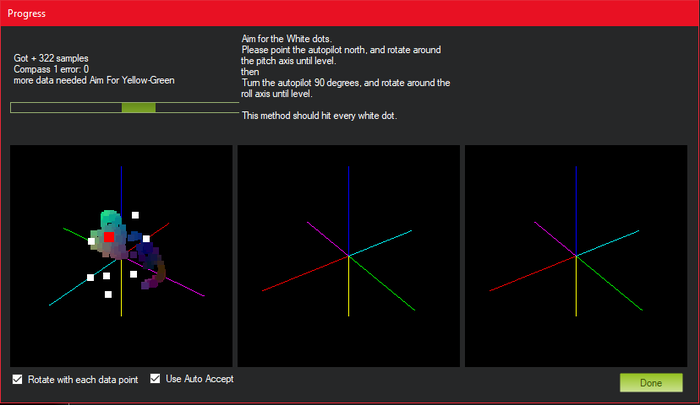
Дальше жмем Live Calibration и начинается веселье: нам нужно этим самым компасом вокруг коптера описать сферу. То есть, мы держим коптер и поворачиваем его в разных плоскостях.. На экране на координатном пространстве будет рисоваться сфера:
И таким манером крутим коптер, пока не наберется нужное количество точек. Чтобы быстрее набралось - стараемся накрыть белые точки. Появится подобное окошко - всё хорошо, идем дальше:
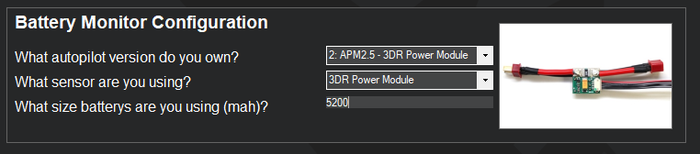
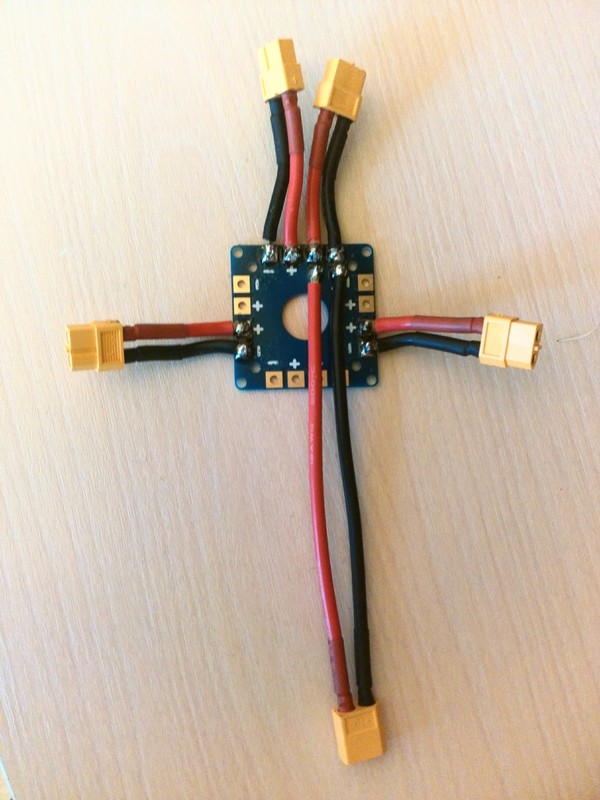
Шаг 7. Вводим данные по тому, как у нас идет питание. У меня такая же девайсина, как на картинке, для нее настройки я указал. Выставляем также емкость аккумуляторов.
Следующим шагом программа спросит, есть ли сонар - пропускаем и переходим к радиоаппаратуре. Видим вот такое:
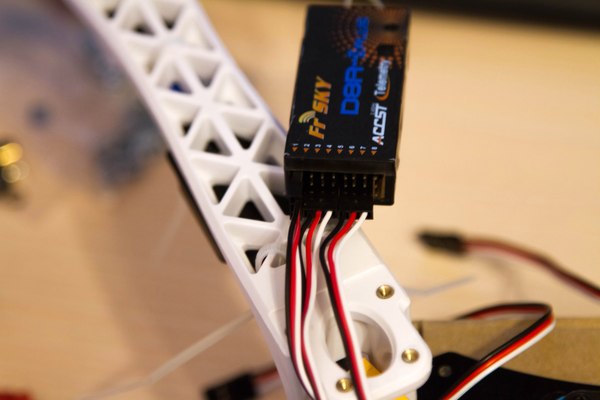
Затем включаем пульт (процедуру привязки и настройки аппы лучше гуглить отдельно для своей аппаратуры и приемника) и жмем Continue:
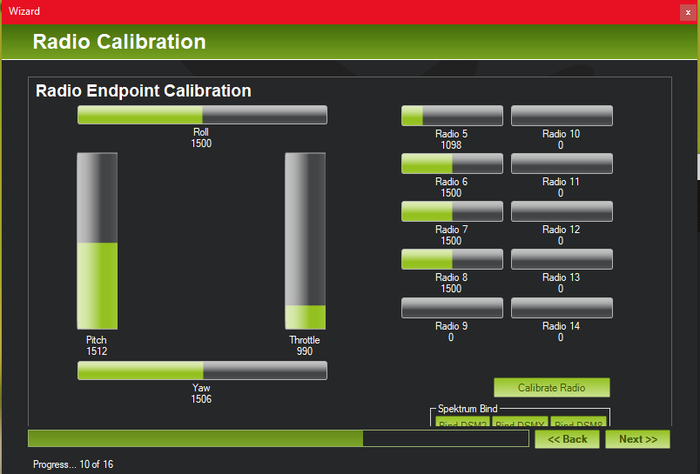
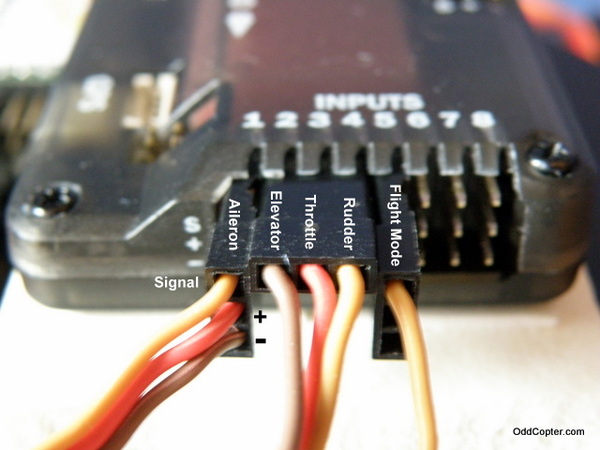
Шаг 8. Проверка аппаратуры: дергаем стики в разные стороны, реагирует ли аппаратура на дергания стиков, и правильно ли их воспринимает. Правильным результатом будет Throttle на левом стике вперед-назад, Yaw на нем же вправо-влево, Pitch на правом вперед-назад, и Roll на нем же вправо-влево. Конечные значения должны быть примерно 980-1000 для минимума, 2000-2020 для максимума. Если у вас не так - жмем Calibrate Radio и гоняем все стики в крайние положения, затем жмем ОК.
У меня на 5 канале стоит шестипозиционная комбинация двух стиков - это я делал для полетных режимов. Это тоже берем из мануалов к своей аппаратуре. Для начала можно не морочиться и просто назначить три режима одному тумблеру.
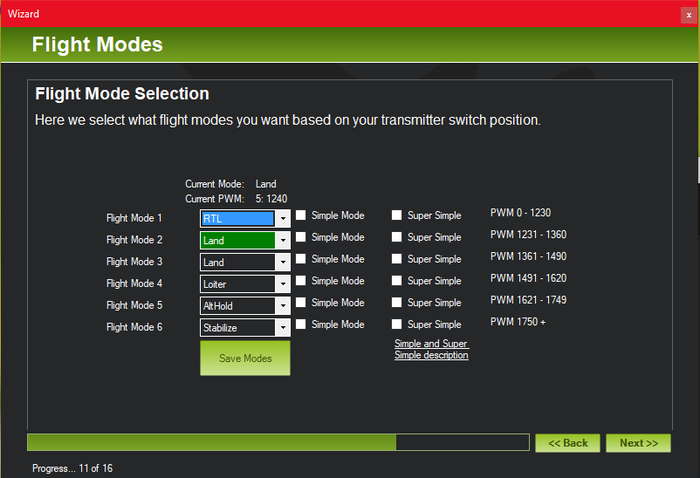
Шаг 9. Установка режимов. Я себе поставил набор, как на картинке.
RTL - это возвращение домой и посадка (на случай, если потеряю его в небе, один раз этот режим спас мне коптер). Коптер выходит на высоту 15 метров, на ней возвращается по прямой к координатам вылета, спускается на высоту 3 метра, затем переключается в режим плавной посадки;
Land - это просто посадка (чтобы с непривычки не ахнуть его об землю);
Loiter - режим удержания точки;
Althold - режим удержания высоты;
Stabilize - самый обычный режим полета со стабилизацией по горизонту.
Зеленый курсор показывает, какой режим сейчас выставлен на аппаратуре (именно поэтому у меня такой бардак в их последовательности). Меняем режим на аппаратуре - выставляем то, что предназначается текущему положению назначенного переключателя. В конце проходим по всем, проверяем и жмем Save Modes.
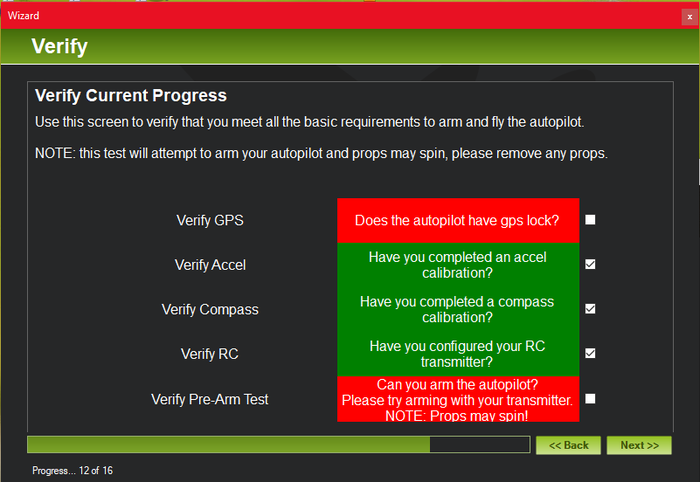
Шаг 10. Проверяем настройки. Если у вас рабочий стол не у окна, то, скорее всего, GPS найден не будет, так что первая плашка останется красной. В противном случае - будет зеленой.
Проверяем, не установлены ли у нас пропеллеры и пробуем заармить (запустить) моторы. Для этого стики на аппаратуре уводим до упора вниз и друг к другу.
К слову, для дизарма (отключения) моторов делаем тоже самое, но стики направляем друг от друга.
Последняя плашка должна стать зеленой. Жмем Next.
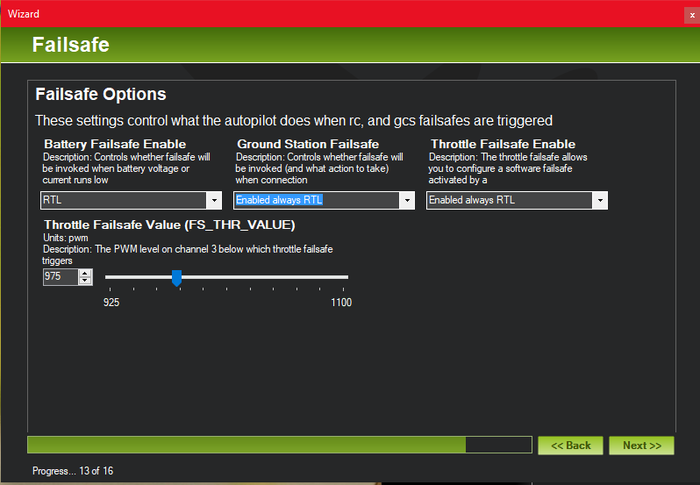
Шаг 11. Настройка Failsafe. Здесь мы выбираем поведение коптера в нештатной ситуации (садится батарея, потеряна связь с наземной станцией, потеряно значение "газа").
В первом случае я даю установку на возврат домой,
во втором - смысла никакого, т.к. у меня не наземная станция,
в третьем - отключение передатчика (аппаратуры) - тоже возврат домой.
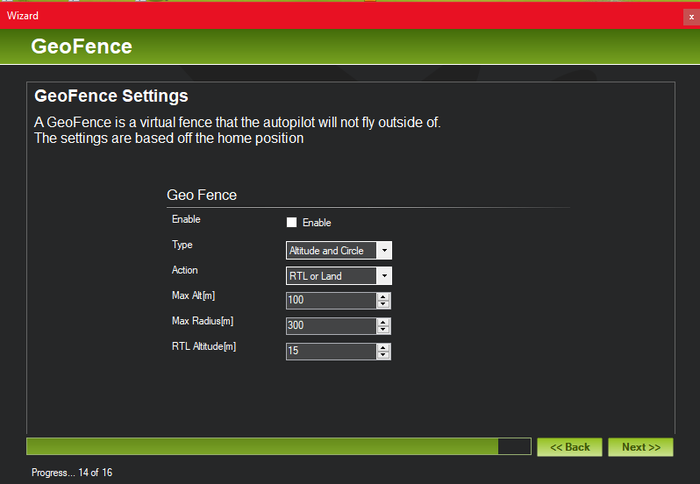
Шаг 12 для тех, кто боится потерять коптер до получения необходимых навыков - настройка "купола", за который коптер не сможет улететь.
Здесь всё просто - при установленной галке ставим параметры, ограничивающие полет: высота, радиус, высота, на которой он будет возвращаться домой в режиме RTL.
На этом первичная настройка контроллера закончена. Жмем Next до упора и отключаем коптер от компьютера.
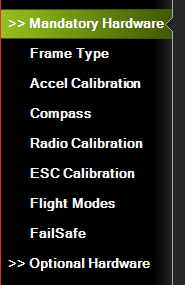
К настройкам можно будет всегда вернуться в разделе Initial setup (для этого коптер подключаем по USB и жмем Connect, если не поключается, играем скоростью - это параметр в выпадающем списке рядом с COM-портами) в меню Mandatory Hardware:
Теперь пара слов о калибровке регуляторов. Эта процедура нужна для того, чтобы ваши регуляторы понимали, какому положению стика газа соответствуют определенные обороты моторов. ВАЖНО: калибровку проводить только со снятыми пропеллерами!
1. Включаем пульт и переводим стик газа в крайнее верхнее положение.
2. Подключаем аккумулятор. Контроллер будет моргать желтым, красным и синим.
3. Отключаем аккумулятор и снова подключаем. Регуляторы издадут несколько серий сигналов:
сначала количество банок аккумулятора (у меня 4), затем ещё дважды (это сигнал, что максимальный газ записан).
4. Переводим газ в крайнее нижнее положение. Регуляторы дадут длинный сигнал, подтверждая, что минимальный газ записан и калибровка окончена.
5. Плавно поднимаем газ - моторы начнут вращаться, набирая обороты по мере набора газа.
На этом всё! Всем ещё раз спасибо за терпение и внимание!
Искренне ваш,