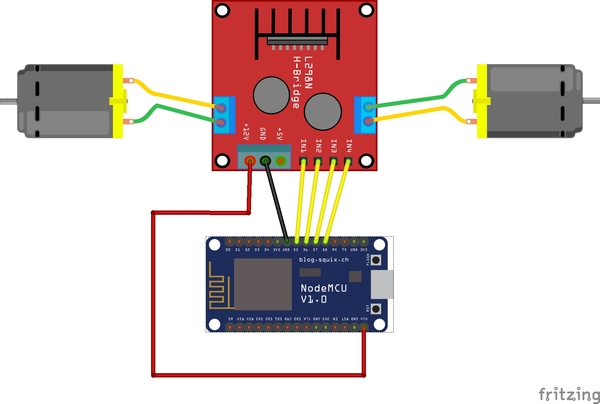
UDP в MIT App Inventor 2 на примере программы управления роботом
В некоторых ситуациях приложениях чувствительных ко времени, на пример управление роботом (особенно быстрым), предпочтительно пренебречь надежностью доставки пакета по сети, чем его задержка.
Для таких целей существует протокол UDP, но для людей мало знакомых с android studio и прочими средами разработки android приложений, использующих визуальное программирование на пример в MIT App Inventor 2 от google, нет возможности использовать преимущество протокола UDP из визуального редактора. Но выход есть и для них - использовать возможность вызова служб и приложений в android.
На пример установив приложение UDP Sender из Play market, в android появится служба отправки UDP пакетов, которую можно вызвать из другого приложения, даже "написанного" в визуальном редакторе.
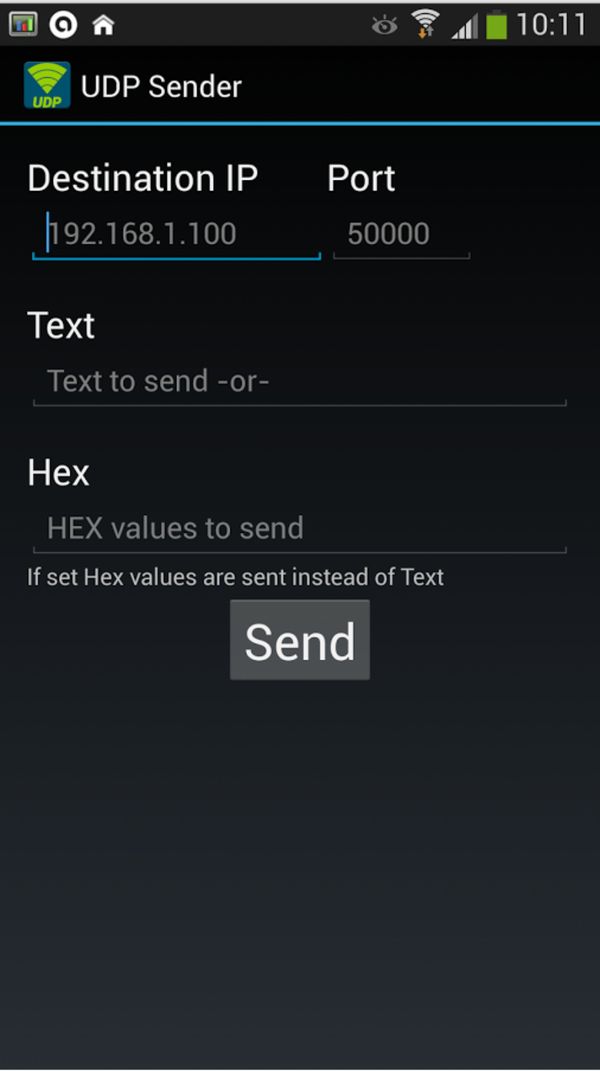
Всё, что нужно знать, чтобы использовать службу отправки UDP пакетов, это полное название пакета приложения, класс, который может взаимодействовать с другими приложениями ну и как формировать запрос из другого приложения.
Для UDP Sender приведу пример отправки UDP пакета с содержимым "send" на IP адрес 192.168.1.200 и порт 8888 из визуального редактора MIT App Inventor2.
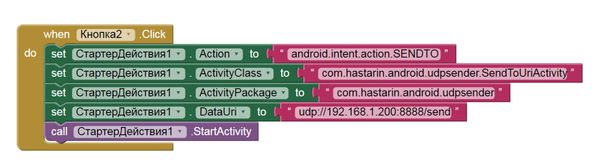
Тут при нажатии "Кнопка2" пакет уйдет.
Более подробно, в том числе о скетче для arduino IDE для приема пакетов и исполнении команд смотрим в видео https://www.youtube.com/watch?v=QoNQS12oFFY
P.S. привожу ссылку на видео, по скольку прикрепить видос к посту не хватает кармы))