FPV Фристайл. Настройка дрона. Часть 4. Режимы
Продолжаем настройку FPV фристайл дрона.
Покупку и сборку смотрите в предыдущих сериях.
Настройка:
1. Часть 1
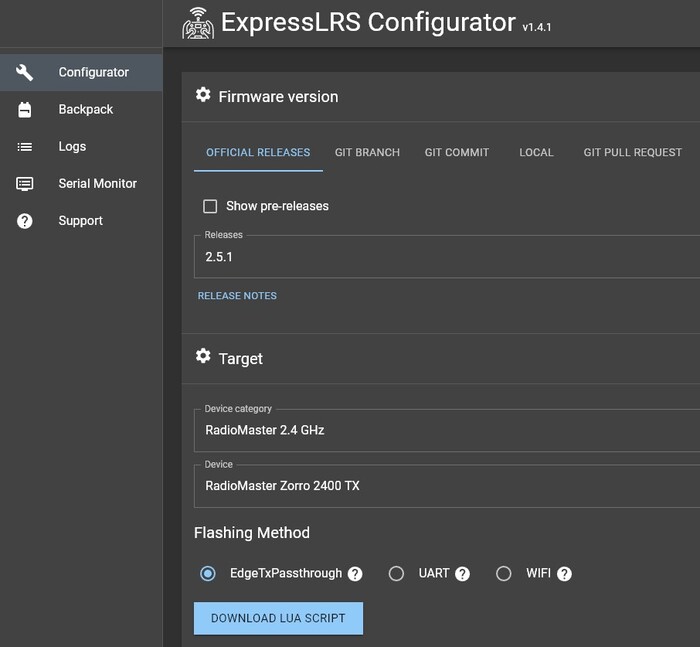
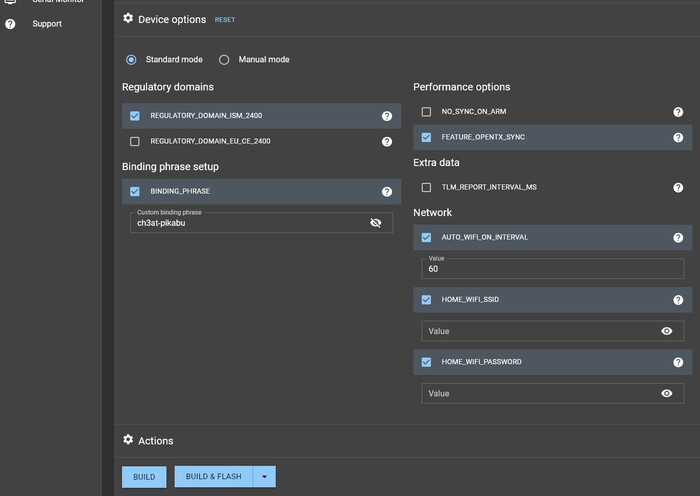
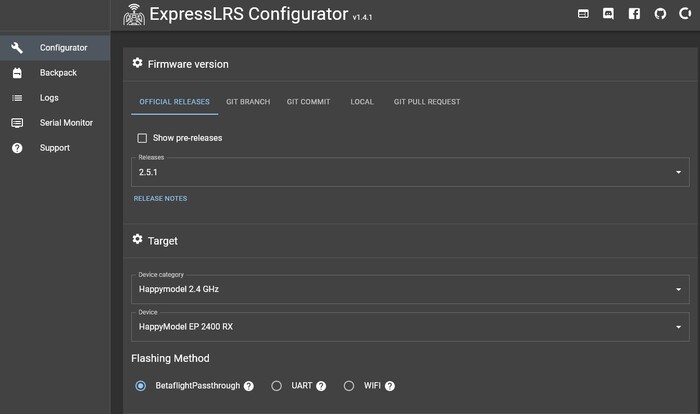
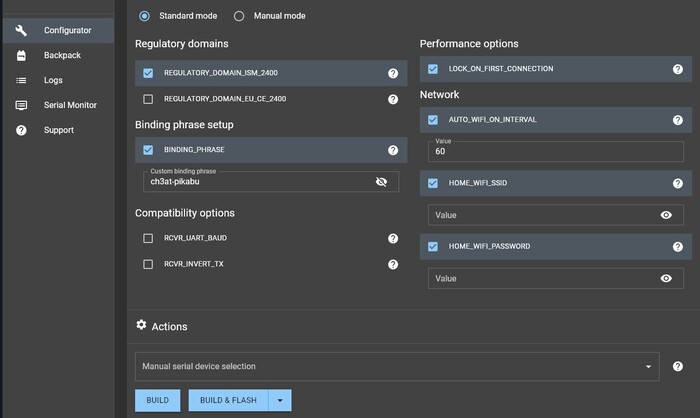
2. Часть 2. Прошивка ExpressLRS.
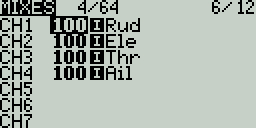
Продолжаем настройку и она имеет смысл только если у нас при подключении к Betaflight Configurator на странице Receiver двигаются индикаторы каналов когда мы щелкаем тумблерами и жмём кнопки. Мы этого добились в прошлом посте.
Режимов в Betaflight много и глядя в интерфейс никак нельзя понять, какие режимы исключают друг друга, а какие будут работать вместе. Например, можно независимо пищать динамиком и включить светодиодную ленту, но нельзя пищать моторами, пока они крутятся. Прошивка сделана так, что ничего страшного не произойдёт, если одновременно включить взаимоисключающие режимы, но интерфейс всё равно позволяет их так настроить, что немного сбивает с толку.
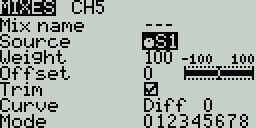
В Betaflight настройка режима выглядит так:

В данном случае мы настраиваем ARM (арминг, "взведение", включение дрона). Режим в котором дрон начинает откликаться моторами на газ и остальные стики - активный режим полёта.
Чтобы появилась жёлтая полоса жмём Add Range (на скрине уже сделано).
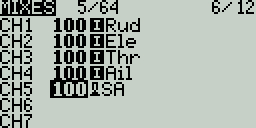
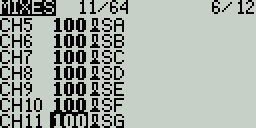
Теперь дёргаем тумблер, на который хотим повесить данную функцию (обычно двухпозиционный) и поле AUTO меняется на AUX<N>, где N номер нашего доп. канала. Нумерация идёт с единицы для первого доп. канала после четырёх основных, то есть AUX1 для пятого канала (согласен, удобно). Важно: для ExpressLRS необходимо ARM настроить именно на AUX1, при этом арм должен быть высоким значением, а дизарм - низким, на это рассчитывает внутренняя логика протокола. По-хорошему, об этом надо было упомянуть в предыдущем посте, чтобы настроить удобный для арма тумблер на CH5 (он же AUX1), но я протупил.
Дальше жёлтой засечкой под шкалой обозначено текущее положение канала (в моём случае это середина - 1500, так как аппаратура не включена). Наша задача состоит в том, чтобы жёлтой областью указать диапазон значений, в которых данный режим активен.
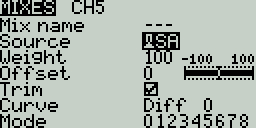
Армить квад кому-то удобно тумблером на себя, кому-то - от себя. Точнее нужно подумать как удобнее дизармить квад в случае выхода из под контроля. Это зависит от конкретной аппаратуры и предпочтений пилота.
В данном случае квад армится тумлером на себя (значение 2000) а дизармится в положение по-умолчанию - от себя (значение 1000). Теперь ясно, почему важно включать аппаратуру со всеми тумблерами в положении по-умолчанию. Можно и нужно настроить аппу, чтобы она перед включением заставляла переключить все тумблеры в дефолт (об этом наверное будет отдельный пост). Газ внизу при включении она требует по-умолчанию.
Теперь пробегусь по другим режимам, которые нам будут нужны:
1. ANGLE - режим стабилизированного полёта, как я уже писал, его по началу удобно использовать для взлёта и посадки без очков.
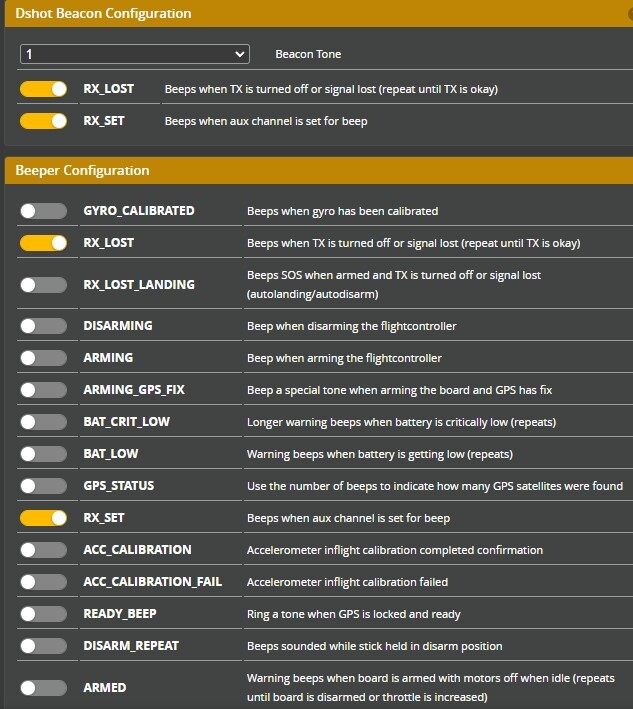
2. BEEPER - режим пищания, моторами и\или динамиком, мы это настраивали.
3. PREARM - режим, при котором разрешён арм. Удобная вещь, чтобы армить квад не одним тумблером, которые можно задеть случайно, а двумя. Первый у меня работает как кнопка, то есть однопозиционный, а вторым квад армится, только при нажатом первом.
4. FLIP OVER AFTER CRASH - режим "черепахи". Когда упали пузом вверх в этом режиме моторы крутятся в противоположную сторону и позволяют перевернуть квад "на ноги". Работает через дизарм: то есть летаем, упали пузов вверх, тумблером дизарм, другим тумблером вкл. черепаха, арм, стиком покрутили пропами, чтобы перевернуться, снова дизарм, тумблером выкл. черепахи, арм и полетели. Этот режим не будет доступен, если протокол моторов выставлен отличный от семейства DSHOT (об этом далее).
5. А наш ACRO режим, ради которого всё мы это делаем будет активен, когда ни один из других не активирован. Точнее это будет режим AIRMODE, который мы включили по-умолчанию раньше.
Этого будет достаточно для первых полётов. Возможностей прошивки гораздо больше: можно задавать несколько каналов на один режим и выставлять логические отношения между ними. Можно в аппе сделать так, чтобы все тумблеры дёргали один единственный канал, но на разные значения (а не 1000 и 2000), и тем самым использовать для всех режимов только один канал. Очень широкие возможности, мы должны о них помнить, но сейчас не заморачиваться.
Также на странице Adjusments у меня на один 3-х позиционник настроена смена трёх профилей рэйтов (Rates - настройки чувствительности), а на другой смена трёх профилей OSD (экранная информация). Это удобно, но опять же, заморачиваться сейчас нет смысла.
Вкладка Servos управляет сервомашинками, которых у нас в кваде нет.
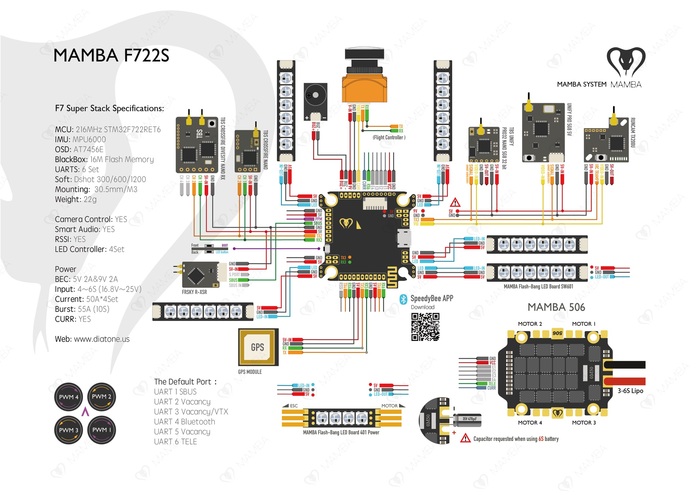
Вкладка Motors настраивает моторы. Первым делом выставляем протокол на DSHOT600 и нажимаем Save and Reboot.

Теперь нам нужно настроить два критичных для полёта момента: порядок моторов и схема вращения.

При этом сам летательный аппарат уже настроен как QUAD X, что означает X-образный квадрокоптер. Достаточно интересно полистать какие ещё извращения умеют летать, главное вернуть QUAD X в это поле.
Переключатель Motor direction is reversed меняет направление вращения всех моторов на противоположное. Точнее - говорит контроллеру, что у нас именно так настроены моторы. Большой разницы нет, но я люблю эту опцию включить. С ней, например, при посадке\падении в траву на камеру не накидывает пропеллерами эту покошенную траву (накидывает в бока рамы на контроллер, но камера чистая). Обязательно запомните, что в итоге вы выбрали - вращение внутрь камеры или наружу от камеры. Когда будем ставить пропеллеры - это будет важно.
А далее у нас идут те самые два момента, которые в версии 4.3 сильно облегчили настройку. Это кнопки Reorder motors и Motor direction.
Диалог Reorder motors покажет контроллеру где физически на раме установлен мотор, который он считает первым, вторым и так далее. Если вы установили регулятор как рекомендуется, и шлейф собран правильно, то все моторы занимают правильные места, но нам необходимо в этом убедиться. Даже не думаем прикручивать пропеллеры и подключаем батарею. Должны прозвучать три коротких и два длинных тона от моторов. С подключённой батареей: во-первых обязательна присоединённая антенна к видеопередатчику, во-вторых он всё равно может сильно греться и в-третьих батарея не должна быть разряжена, достаточно из режима хранения или полностью заряженная.
Взводим переключатель I understand the risks и чуть приподнимаем ползунок вверх у мотора номер один. Должен вращаться мотор согласно схеме в разделе Mixers, то есть задний правый. Проверяем остальные моторы. Если что-то не совпало, жмём Reorder Motors, там всё понятно, крутится мотор, жмём на схеме какой именно. Потом нажимаем Save and Reboot.

Дальше мы настраиваем направление вращения. Вероятность, что по-умолчанию всё настроено верно - почти нулевая! Регулятор с завода настроен крутить все моторы в одну сторону. Поэтому сразу жмём Motor direction соглашаемся на риск, выбираем Wizard. Берём бумажку в руки и прислоняем перпендикулярно к вращающемуся мотору, по отклонению бумажки видно куда мотор вращается. Жмём на номер того мотора, который вращается неверно. Обычно это моторы 1 и 4 или 2 и 3, но не верьте мне на слово, спаять можно как угодно.
Проверьте и порядок и направление вращения дважды, без этого ничего никуда не полетит.
Можно улучшить поведение квада в воздухе включив RPM Filtering (фильтрация на основе оборотов моторов) но для этой фичи нужно включить Bidirectional DSHOT (двунаправленный протокол управления моторами), а он, в свою очередь, может не поддерживаться текущей версией прошивки регулятора, но точно поддерживается последней, то есть нужно перешивать регуляторы. А как это сделать, расскажу на своём канале в личной телеге. Либо, после освещения всех необходимых этапов, дождитесь об этом отдельный пост.
В следующей серии будем настраивать видеопередатчик.