

Программный ШИМ на arduino NANO
Приветствую всех!
Сегодня я хочу затронуть тему реализации программного ШИМ на Ардуино НАНО.
Бывают такие моменты, что надо ШИМ там где его нет, например на Аналоговых пинах.. почему нет?
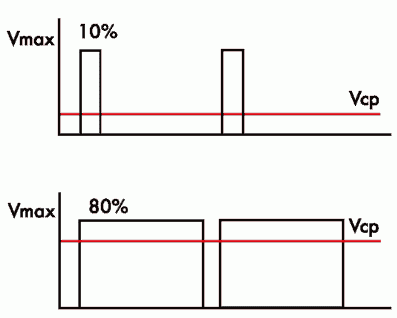
Что такое ШИМ я затрагивал ТУТ, Напомню в краце: ШИМ - это отношение высокого и низкого сигнала за какой-либо период, который называется частотой ШИМ.
Картинка из интернетов:
И вот понадобилось мне сделать ШИМ там, где его нет в Ардуине.
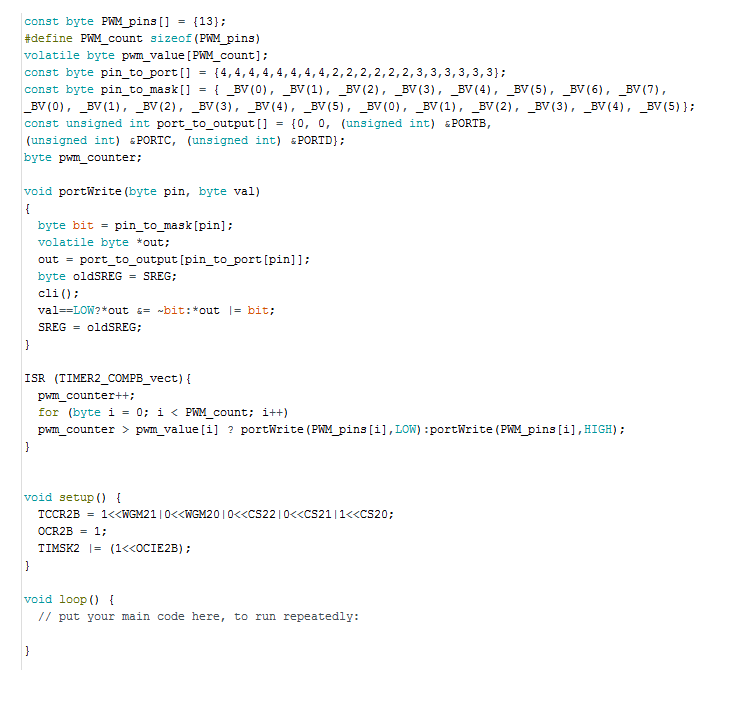
Да простит меня сообщество, - не вижу смысла заливать код куда либо, если там несколько строк:

Котэ работает на прерывании по таймеру2, так как на нем висит Аппаратный ШИМ пинов 3 и 11, то никаких критичных "базовых" функций этим не испортим.
Значит в блоке setup просто переводим таймер в режим работы по CLK, т.е. 16 мГц, и разрешаем прерывание по таймеру.
Для включения ШИМ на каком-либо пину делаем так: в массиве пинов пишем пины какие надо, через запятую,.. ну там {13, A0, A7, 5} и тд...
Затем в Массиве значений ШИМ записываем им всем начальное значение, лучше нули, ... т.е. {0, 0, 0, 0} - 4 Пина юзаем, 4 значения записали,.. хотя наверное можно вообще не писать, они и так при инициализации нулями будут..
Ну а дальше в цикле программы, когда нужно записываем в переменную нужное значение, т.е. надо на пин A0 подать 50%, - пишем PWM_pins[1] = 127; обьясняю: в 1 ячейке массива пинов записан A0,.. 127 - это половина от 255 (0-255 значения). Вот и всё.
Надеюсь кому поможет.






Arduino & Pi
1.5K поста20.8K подписчика
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Выкладывать код прямо в посте - используйте для этого сервисы ideone.com, gist.github.com или схожие ресурсы (pastebin запрещен)
• Рассуждать на темы политики
• Нарушать установленные правила Пикабу