Прототип квадрокоптера с защитой от падения
Пришла в голову интересная идея
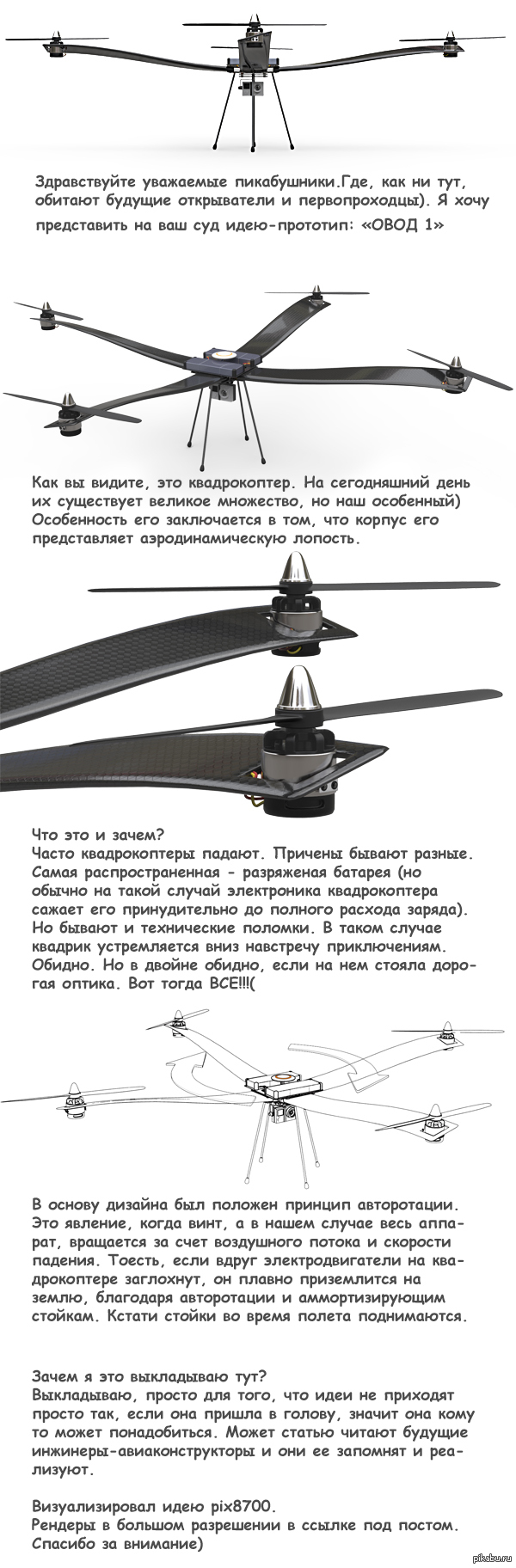
Забавно будет наблюдать полёт подобного аппарата в горизонтальной плоскости - лучи данной конструкции будут действовать как бумеранг то есть раскручивать его . Второе - их длинна достаточная для авторотации - вибрации от ВМГ сведут с ума любой полётный контроллер . Ну и сама идея - с малой высоты он просто не успеет раскрутиться а на большой уже есть различные парашютные системы спасения . Но идея интересная ...
а вот чтобы он летал прямо надо будет делать программную компенсацию этой "лопасти".
задачка конечно нетривиальная...
вобщем очередной велосипед с квадратными колесами, для которого предлагают построить дорогу.
Я думаю существующие контроллеры справятся с этой лопастью. По моему опыту, если правильно установлен и работал гироскоп, то контроллер обороты всегда подстраивал без проблем.
я вот что-то не могу понять, ну раскрутит его, допустим. В моем понимании что б получить эффект торможения нужна площадь перьев(хз, как они называются по правильному) должна быть в разы больше. Если они будут в разы больше,то его скорее всего перевернет от малейшего дуновения, нужно будет подруливающие устройства, к которым (раз мы рассматриваем отключение питания) нужен отдельный аккум. Что в сумме со всем выше сказанным дает коптеру +500г веса, благодаря которому все эти улучшения нахер не сдались.




