

Цифровой робот-чайник : )
Пол-Луис автор робота, заинтересовался робототехникой и 3D печатью, а после игры в Alice: Madness Returns он точно знал как будет выглядеть его робот.
Сравните разработку с чайником из игры:
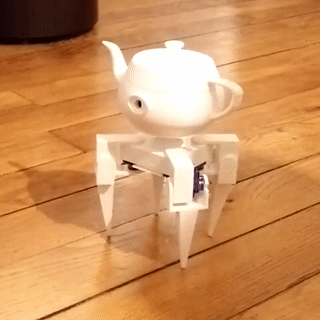

«Мой новый робот сделан на базе Pi Zero W с камерой», - объясняет Пол Луис в своем блоге. «Он подключается через последовательный канал связи с платой Arduino Pro Mini, которая управляет сервоприводами».
Каждая нога имеет две точки артикуляции, одну для колена и одну для лодыжки. Чтобы переместить каждую из ног, чайник использует в общей сложности восемь сервоприводов.
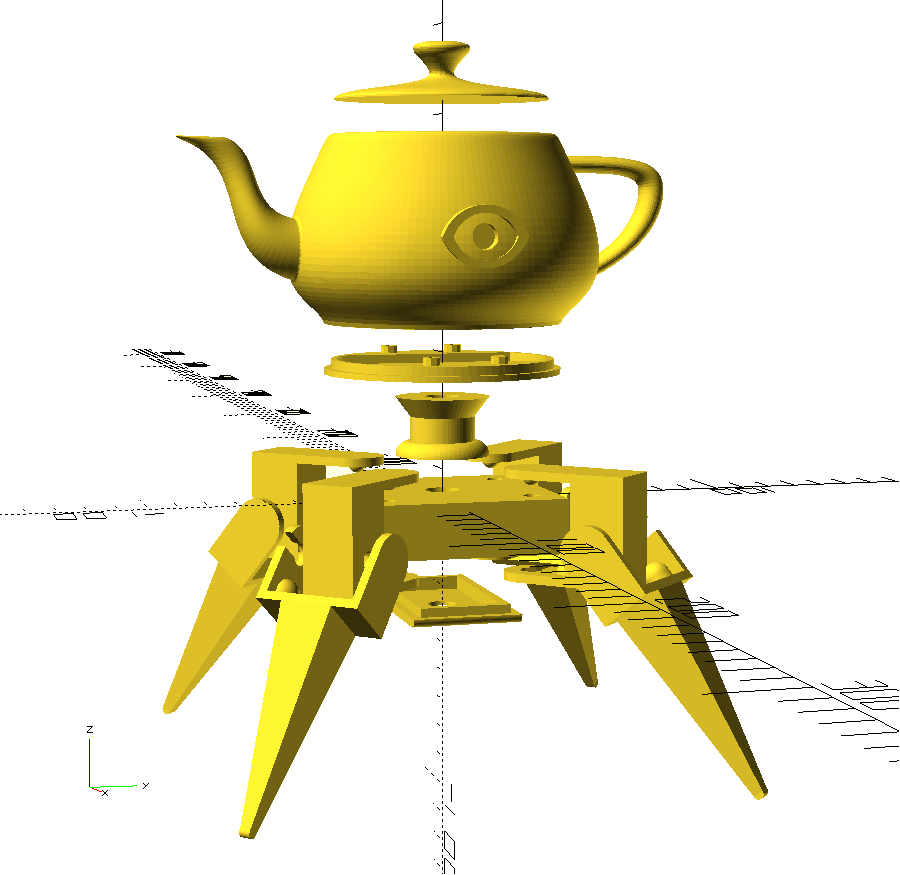
Финальный 3D макет робота в программе OpenSCAD.
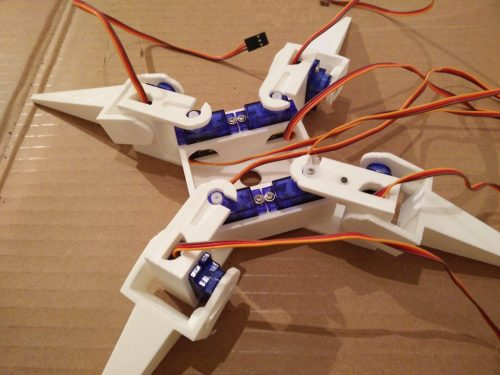
Пол-Луи разработал и 3D напечатал корпус робота, в соответствии с использованием нужных компонентов. Плата Arduino контролирует конечности, за другую работу отвечает Raspberry Pi: получая команды и направляя работу сервоприводов.
Протокол для перемещения сервоприводов прост: сначала задается сервопривод цифрой от 0 до 7, далее определяется угол перемещения конечности робота (45 или 90). После этого программная работа закончена.
Ввод команд пользователем полезен для отладки. Пол-Луи продолжил работать над кодом для разработки большего количества движений.
Источник: raspberrypi.org/blog
ARMLAB - Канал про мини компьютеры размером с кредитную карту
Arduino & Pi
1.4K постов20.6K подписчиков
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Выкладывать код прямо в посте - используйте для этого сервисы ideone.com, gist.github.com или схожие ресурсы (pastebin запрещен)
• Рассуждать на темы политики
• Нарушать установленные правила Пикабу