

Соберем ШестиНог'а Часть -1.
Статья вступление, здесь не будет количества деталей (легкое описание), подробного описания подхода к сборке, а только «как все начиналось».
Побудило к написанию отсутствие адекватных описаний "на пальцах" как это все создается .
Коллега на работе захотел что-либо построить для изучения arduino, к тому времени у меня накопилось много идей и некоторые я научился воплощать. Не желая погружаться в проблему целиком решил дать ему «..одно маленькое, но очень отвессвенное поручение..»

задание с которым справится только желающий этим заниматься, я дал ему FreeCAD, показал как рисовать и сказал искать платформу и перерисовывать «под себя»!
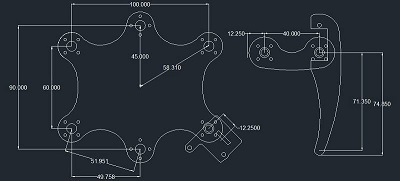
Надо сказать он справился с этой задачей! Мы взяли платформу, он ее немного уменьшил, подогнал под, тогда уже накупленные 6 сервоприводов, отверстия чертеж (на фото не мое, но похоже).
Остов и ноги мы вырезали на лазерном станке из фанеры 4мм, крепления и ответные втулки вращения корневых серв напечатали на 3D Принтере. К тому моменту я докупил еще приводов до полного комплекта чтобы подстегнуть «подмастерье». Сервы были выбраны не самые лучшие, но самые недорогие и прочные. Это китайские подделки копии (по механике и габаритам) TowerPRO MG946 (MG995). 12 кг усилие по паспорту. Опробовав разные версии этих серв пришел к выводу что годными являются те у которых латунный выход на крепление, а не металлического оттенка
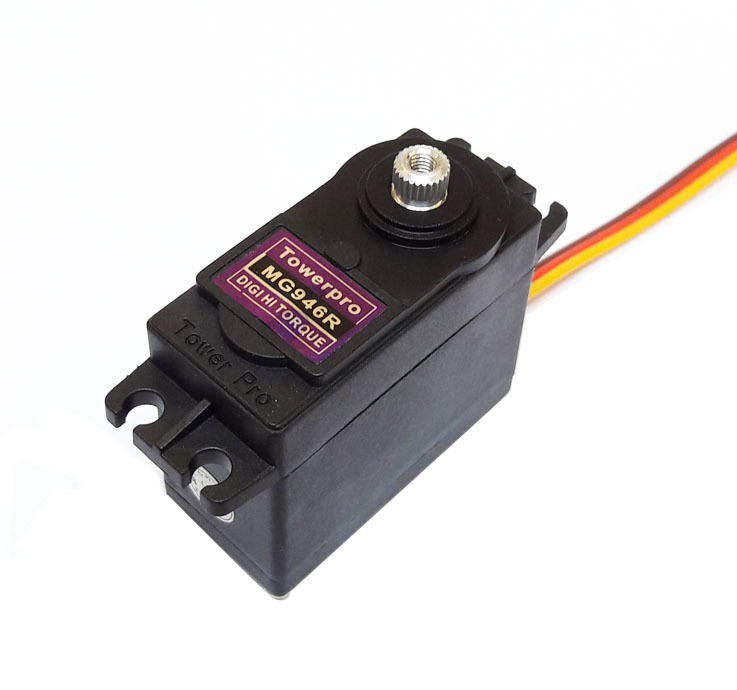
(у оригинала латунный).

Внутри может быть не как у оригинала, но они мне понравились. Не питайте мокрых надежд, конечно они не цифровые (если куплены по минимальной цене) скорость отклика и работы ниже, но жажда творчества это для меня окупает.
Платформу мы взяли arduino nano (full china) добавим плату расширения на 16 каналов или запилим вторую arduino nano по I2C (может оба варианта покажем)
Платформа на 70% готова, основные движения отдельных ног отработаны. В следующей статье будет описание геометрии (тригонометрии), количества требуемых деталей, даже уже вес (взвешенного вживую робота).
П.С. хотел назвать свою статью : -по стопам «Пробная платформа с шестью ножками..» но это не так, хотя приятно увидеть что кто то тоже хочет разобраться во всем с нуля!
П.П.С. Поражает обилие конструкций в сети и либо никакого описания процесса, либо выкладывают совершенно дикие способы ( по мне так доставание гланд через *) с кучей библиотек в кокой нибудь системе 3-х мерного проектирования которую написал "акимото" и т.д.
П.П.П.С. Это не очередной рассказ о том как наша галактика прекрасна и в ней много красивых роботов, взгляните на моего! Все чертежи, скетчи и прочее необходимое для повторение будет выкладываться.
Arduino & Pi
1.5K поста20.8K подписчиков
Правила сообщества
В нашем сообществе запрещается:
• Добавлять посты не относящиеся к тематике сообщества, либо не несущие какой-либо полезной нагрузки (флуд)
• Задавать очевидные вопросы в виде постов, не воспользовавшись перед этим поиском
• Выкладывать код прямо в посте - используйте для этого сервисы ideone.com, gist.github.com или схожие ресурсы (pastebin запрещен)
• Рассуждать на темы политики
• Нарушать установленные правила Пикабу