
Как обнулить значения энкодера Kawasaki
Итак
Имеем bx 100 и контроллер t52
После некоторого простоя без питания садится батарейка энкодеров
В результате имеем сбитые положения осей
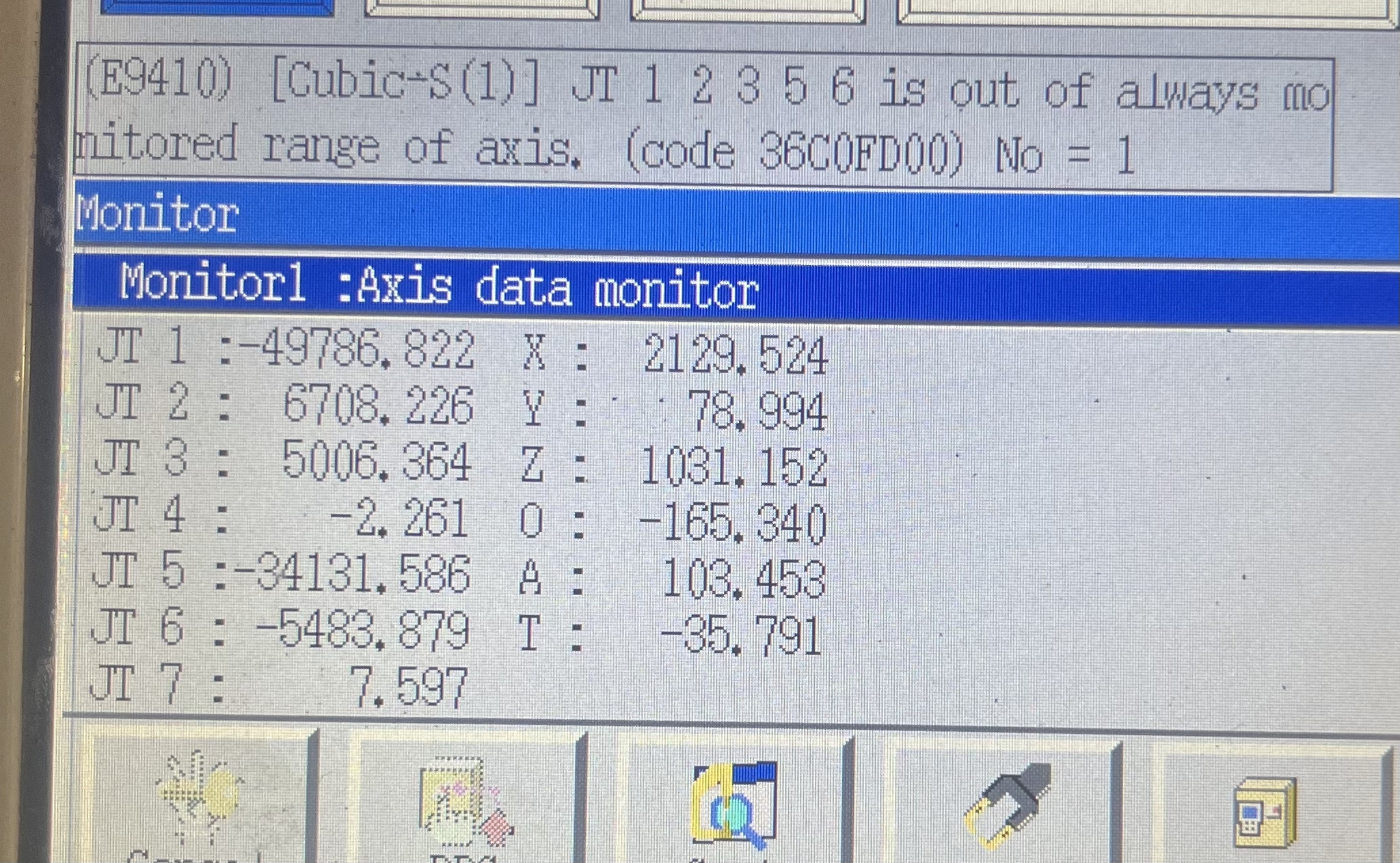
Дабы не получить восставшую против людей машину, делаем грубое обнуление робота в текущей позиции
Иначе при подачи питания на двигатели робот может покалечить себя, нас и все что находится в радиусе пары метров
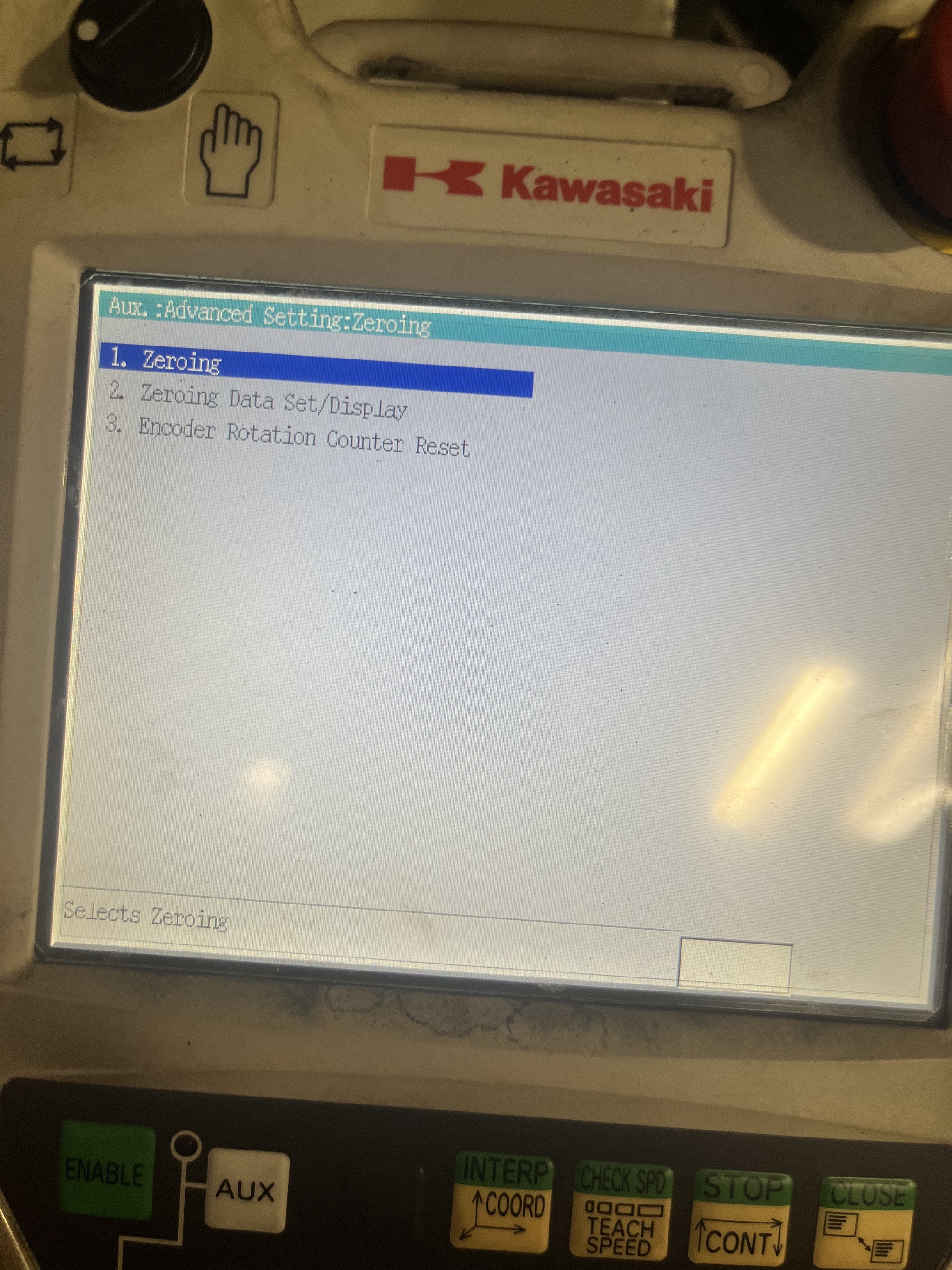
Сначала сбрасываем счетчик
Потом в обнуление.
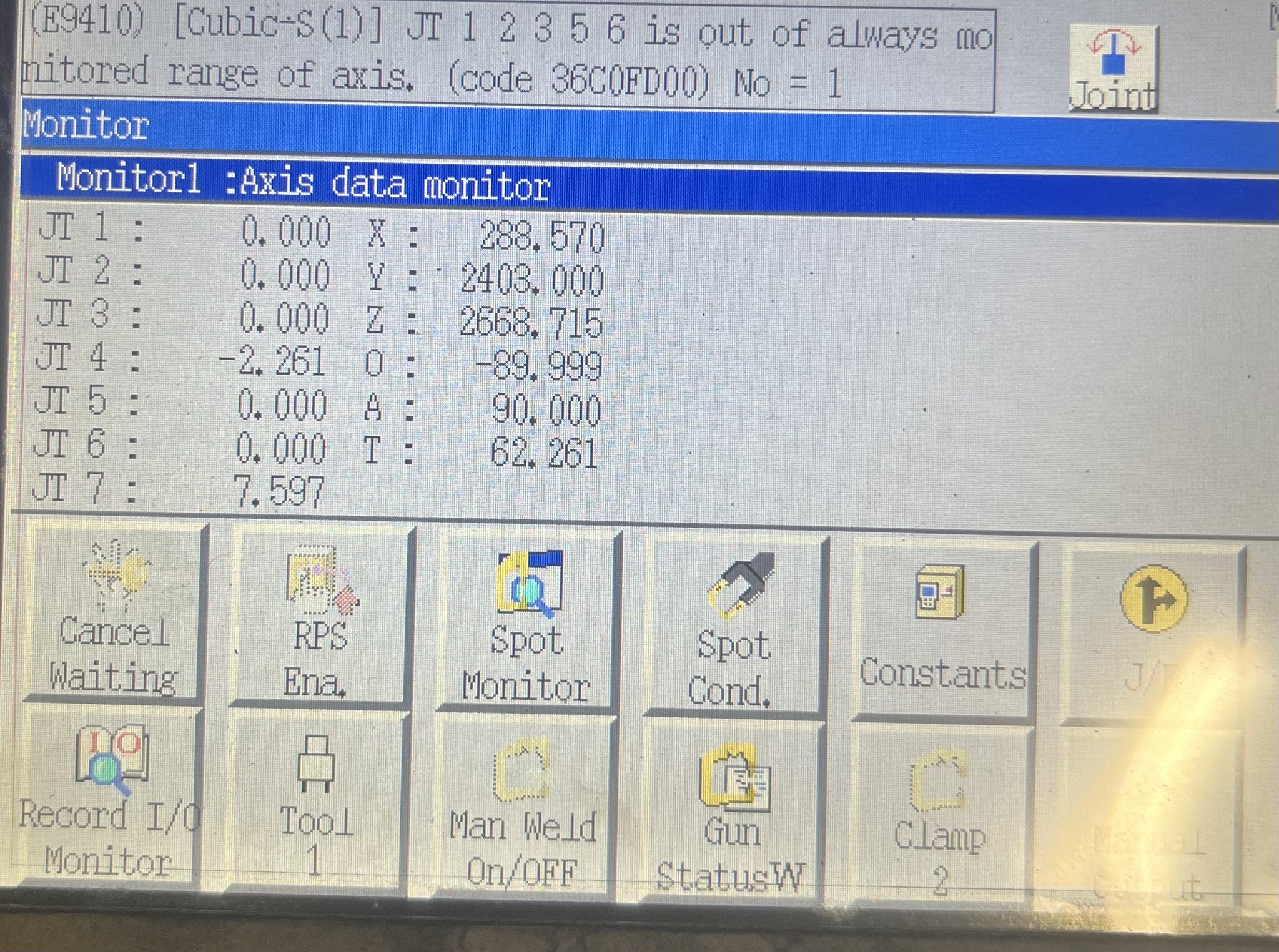
Получаем это, 4-ю и 7ю не обнулял, но потом получилось что 7ю тоже надо
Далее записываем данные в блок положения работа в пространстве
Меню это находится в константах, но просто так оно не появится, нужен р-код числа пи(2 знака после запятой)
Перезагружаем контроллер
После загрузки, обнуляем уже по I-метках
Сопоставляем все метки, после чего процедуру обнуления производим заново
После выполнения данных манипуляций, проверяем рабочие программы, на предмет смещения и т.д корректируем по факту
На этом все!
Мы молодцы, вы тоже)