


DJI F450 ARF kit, обзор-сборка
Привет всем подписчикам сообщества DIY Drones.
После недавнего краша (http://pikabu.ru/story/testovyiy_polet_dji_naza_m_lite_43438...) моей китайской сборки с контроллером DJI Naza M Lite, я решил испытывать на прочность продукцию DJI целиком и полностью. Выбор пал на DJI F450 ARF kit. Сам набор состоит из: рамы DJI F450, бесколлекторных моторов 2312E, регуляторов E series 420 LITE с пропеллерами 9450.
Так как опыт пользования у меня только китайскими комплектующими, было очень интересно с самого начала почувствовать разницу. Забегая вперед: разница во всем ощутимая, от упаковки до качества пластика.
Начнем с упаковки. Все красиво, эстетично. Моторы и регуляторы упакованы плотно, в специальный транспортировочный брикет. Думаю, даже при желании сложно было бы повредить содержимое. Сама коробочка:
Что внутри:
4 луча, набор болтиков для крепления лучей к пластинам, набор болтиков для крепления моторов к лучам, 2 силовых провода, липучка с клейким основанием, 4 мотора, 4 регулятора, ремешок-липучка (честно говоря, так и не понял, только для меня он оказался неудобным или в целом он просто неудобный), верхняя пластина и нижняя пластина (она же плата питания), ключик для отвинчивания пропеллеров и сами пропеллеры. С пропеллерами тупанул, забыл их запечатлеть.

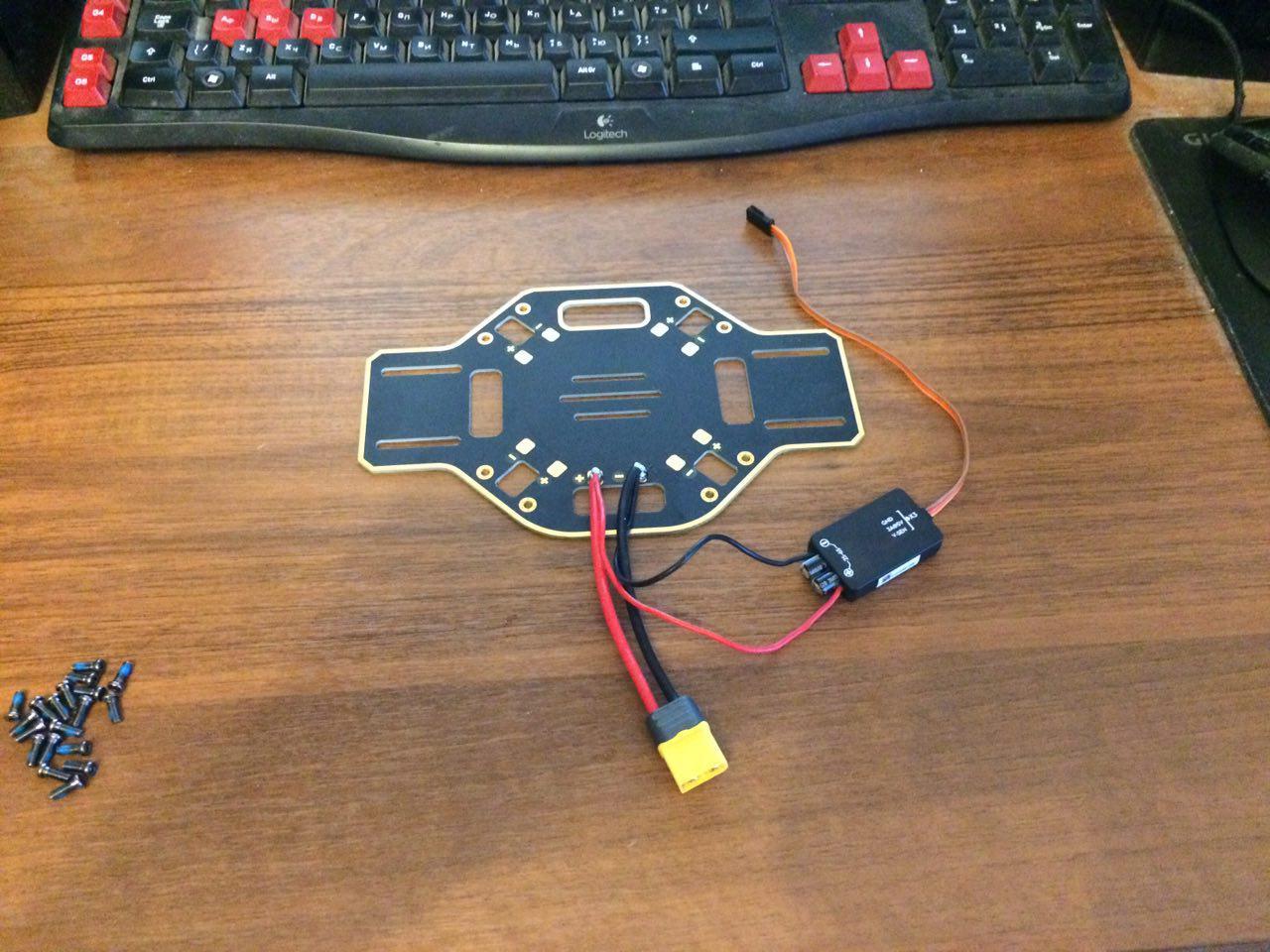
После того, как всем налюбовался, все потрогал, рассыпал и собрал винтики, решил начать с пайки силовых проводов к разъему XT60 и к самой большой пластине из набора.
Так как PMU от Naza M Lite так же должен быть приделан к плате питания, пришлось немножко понервничать из-за того, что площадок для пайки не так много, как хотелось бы.
Первый этап закончился таким образом:
Далее нужно понять, сколько откусывать провода регулятора, что бы не болталось много лишнего. Для этого нужно взять один луч, прихватить к нему мотор, подключить мотор к регулятору. Луч с мотором приложить к месту его предполагаемого крепления и немного с запасом отметить, где будем перекусывать провод.
Кстати очень грамотно, я считаю, сделаны провода у регулятора. Минус сплетен вокруг плюса, как экран. На следующем фото видно, о чем я говорю:
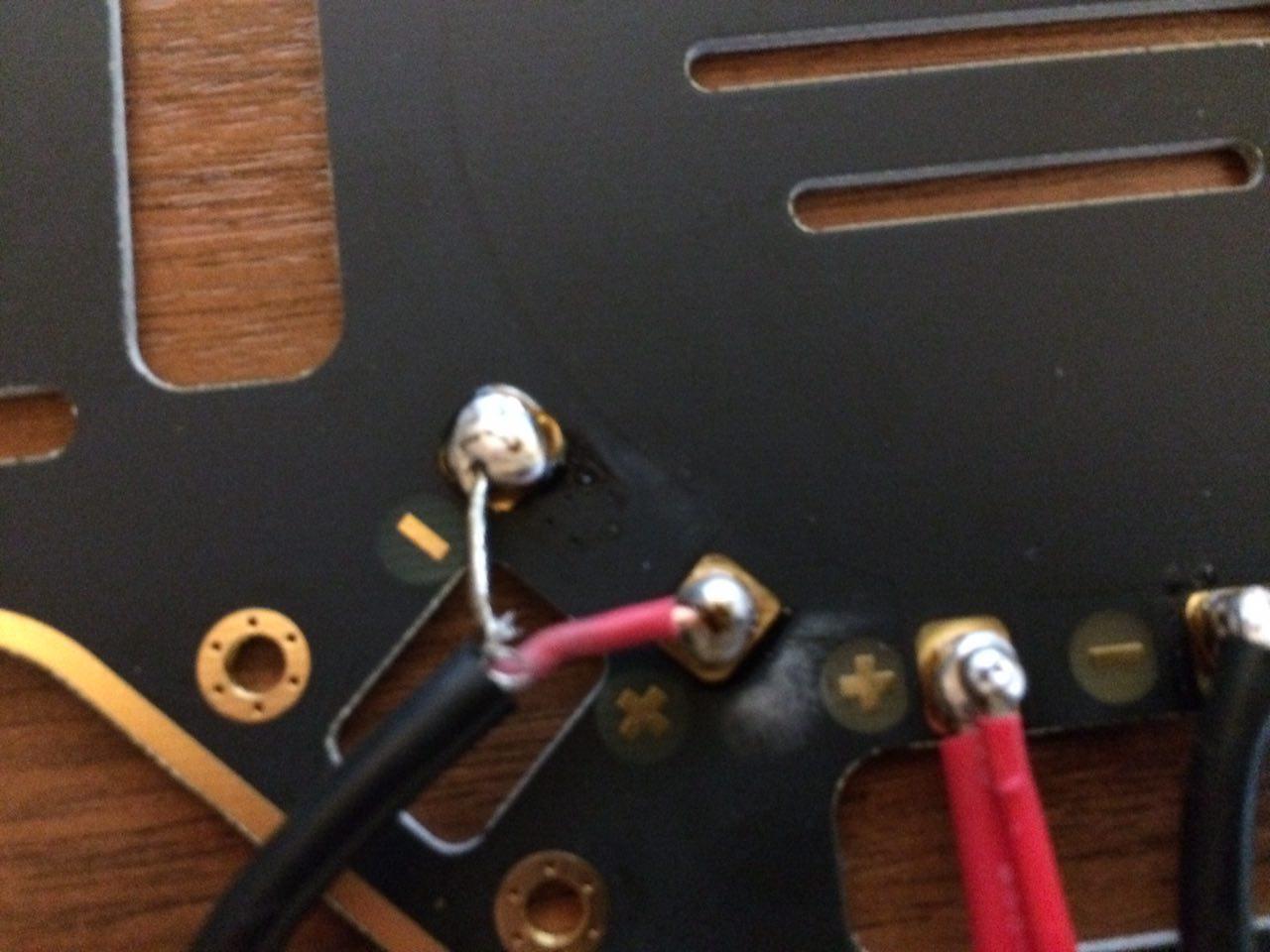
Кстати, за качество пайки сильно не пинайте, паяльник в руках последний раз держал лет 10 назад. Кстати, полезная статья, которая новичкам покажет, что паять не сложно, ну и таким как я напомнит, как это было: http://pikabu.ru/story/kak_nauchitsya_payat_3534527
Соответственно припаиваем 4 регулятора к площадкам на силовой плате, моторы прикручиваем к лучам. Получается вот так:

Важный момент. На моторах уже есть обозначения, какой крутится по часовой, какой против. У китайских моделей эта информация отсутствует и вопрос с направлением вращения решается переподключением 2х любых проводов к регулятору, т.е. вытаскиваем 2 провода из регулятора и втыкаем 1й провод в гнездо 2го, а 2й провод в гнездо 1го.
Соответственно пропеллер, вращающийся по часовой не прикрепится к мотору, с направлением вращения против часовой.
Вот так выглядит направление вращения мотора:
1. стрелкой

2. буквенным обозначением (CW - по часовой, CCW - против часовой):

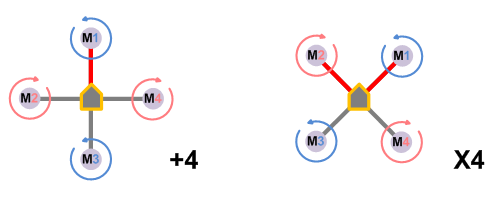
По следующей схеме прикручиваем лучи, что бы все вращалось правильно.
Порядок подключения и направление вращения моторов для контроллеров Naza:
О том, как подключить моторы и приемник к контроллеру можно почитать в моем описании к Naza M Lite (http://pikabu.ru/story/dji_naza_m_lite__gps_mini_obzor_43304...).
Далее дело за малым: прикрепить на пластиковые стяжки к лучам регуляторы, определиться с расстановкой компонентов и прикрутить верхнюю крышку.
С регуляторами все просто, берем стяжку, обматываем вокруг регулятора и луча, затягиваем. Повторить четыре раза.
Ниже первый вариант расстановки компонентов, с закрепленными регуляторами:
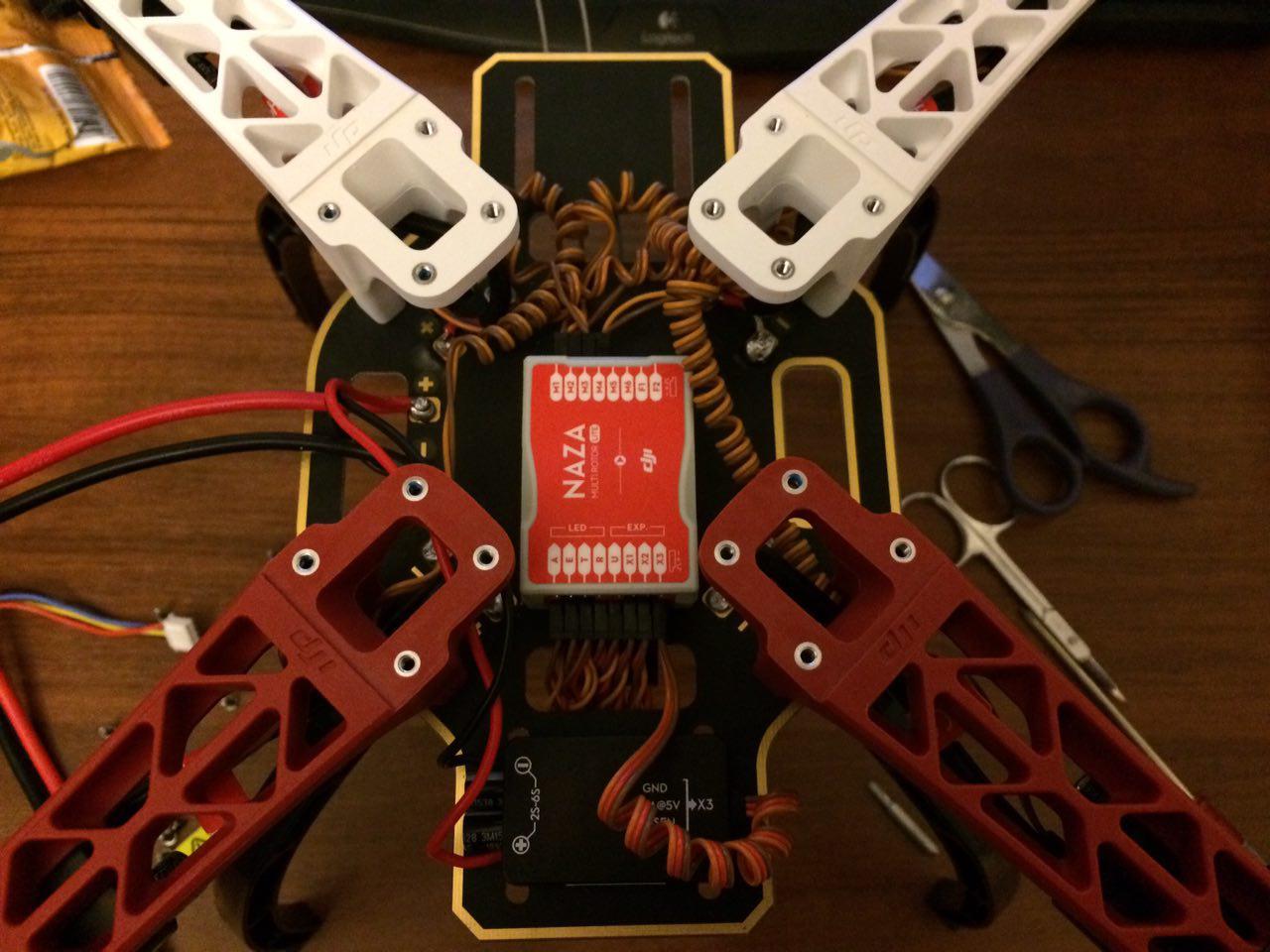
В первом варианте меня не устроило крепление PMU, так как аккумулятор я решил крепить на верхней крышке и PMU мешался при креплении аккумулятора лентой-липучкой. Полетный контроллер я решил установить в самый центр нижней платы. Важно, что бы контроллер смотрел строго по направлению движения. Для этого на нем нарисована специальная стрелочка. Чем ровнее относительно направления движения будет установлен контроллер, тем лучше.
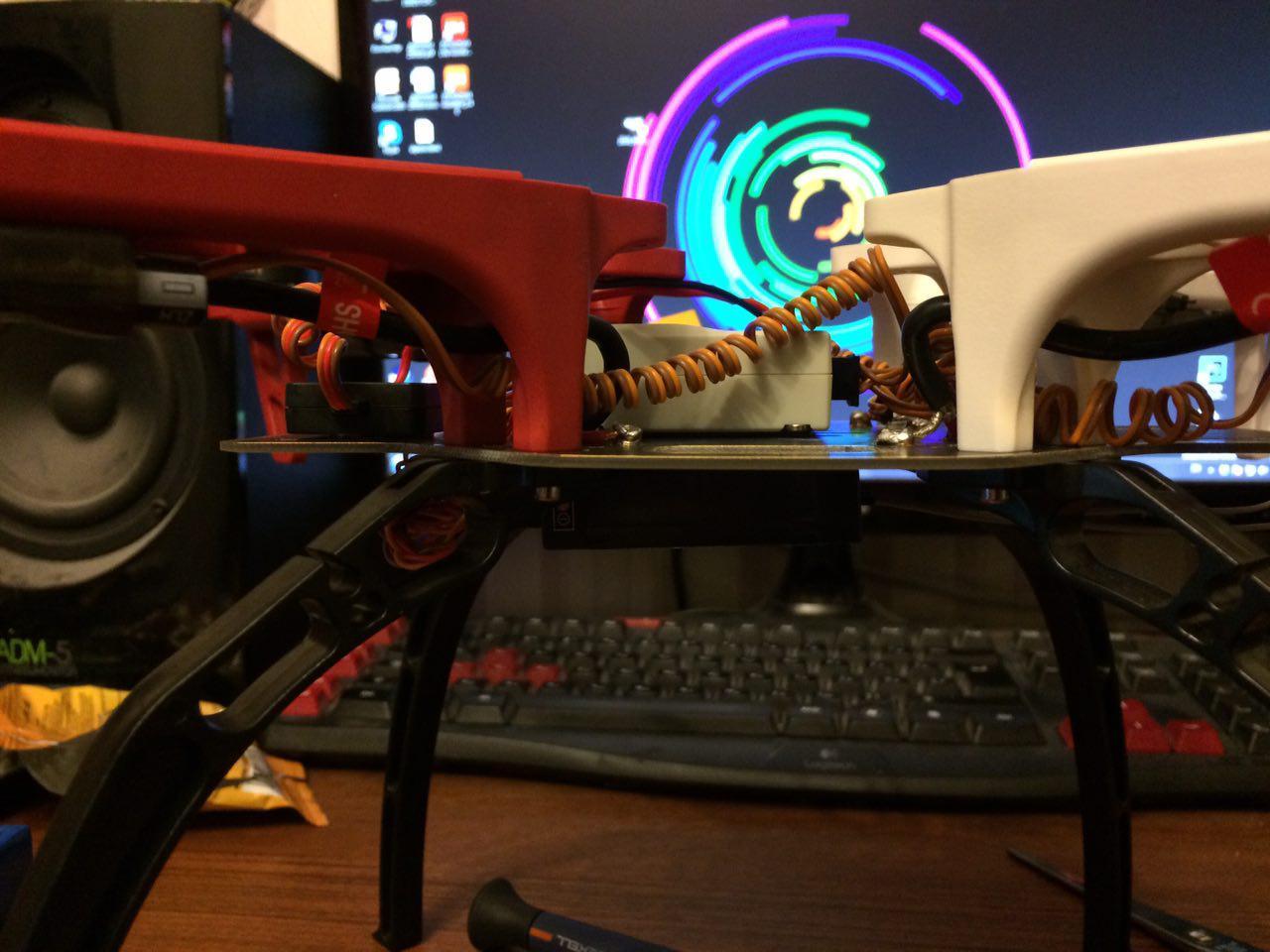
На заднюю часть там же прикрепил PMU. PMU и контроллер держатся на двустороннем скотче:
Ровно напротив полетного контроллера на ленту-липучку с клейким основанием из комплекта прикреплен приемник:
LED-индикатор из набора Naza M Lite, так же на двусторонний скотч, прикрепил к передней части нижней пластины, лицом вниз. К сожалению фотку сделать не догадался.
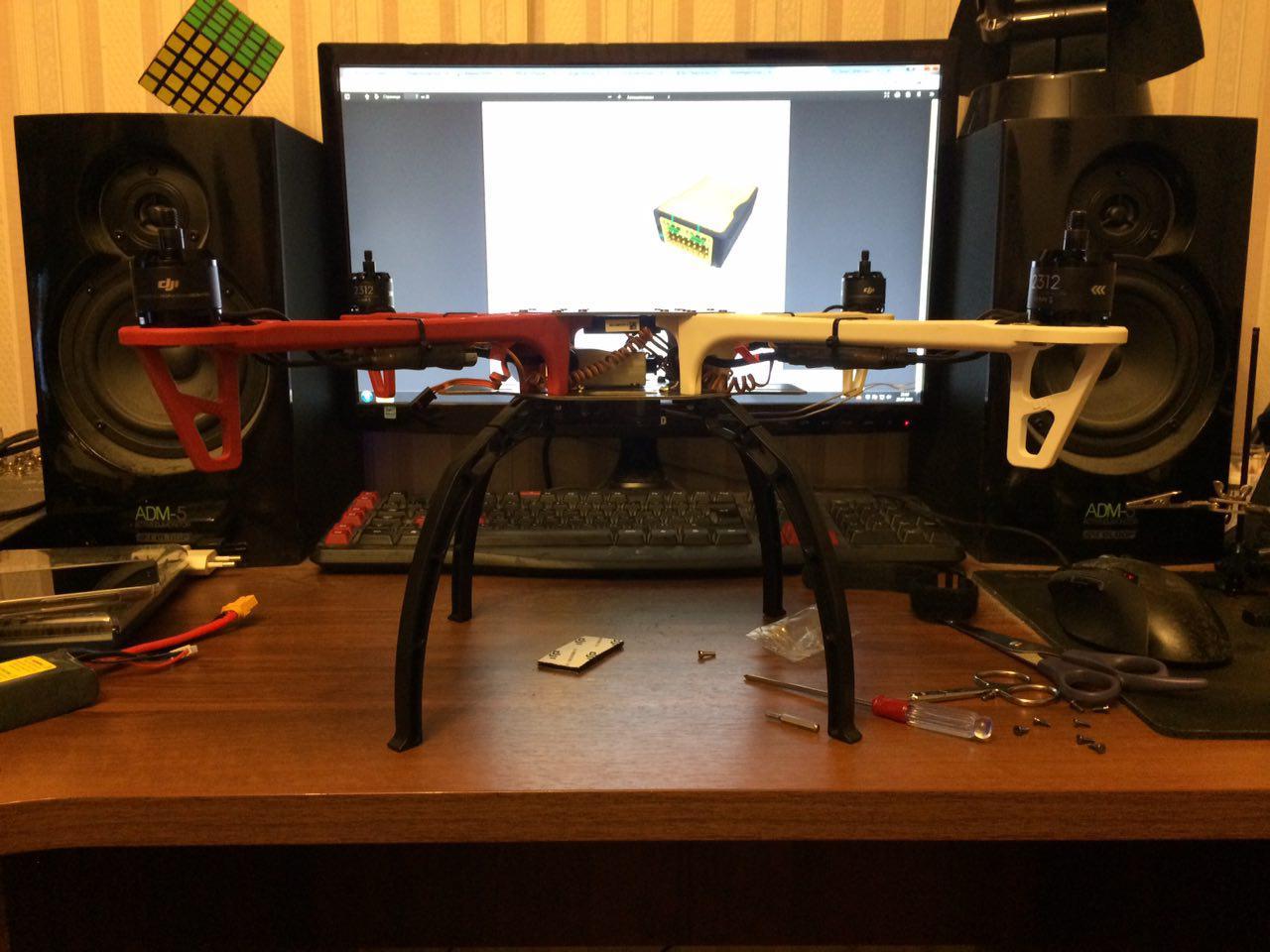
Финальный этап - прикрутить верхнюю крышку, установить GPS, прикрутить лопасти и зафиксировать аккумулятор (специально к этой сборке купил 4s АКБ на 3700 mah, закрепил лентой липучкой). Еще раз заострю ваше внимание, лопасти как попало не прикрутить. CCW только к CCW, CW только к CW.
В итоге имеем такой аппарат:

После сборки и первых полетов сделал следующие выводы:
1. конструкция реально легче, чем у китайских собратьев похожего форм-фактора. Даже просто взяв в руки 1 мотор/луч китайского производителя и 1 мотор/луч DJI разница чувствуется (весов кухонных нет, к сожалению, хотелось бы точную разницу понять).
2. на новых моторах коптер летает дольше и стабильней, что не может не радовать. На 3s аккумуляторах время полета увеличилось с 7 минут до 9-10, а на 4s летать можно 16-18 минут смело, без страха навредить аккумулятору.
3. выглядит ярче =)
Если судить объективно о разнице полета, то, думаю, можно добиться и от APM с китайскими комплектующими такого же результата. Летать, будет не так долго все равно и времени настройка займет гораздо больше.
Самый важный минус - это цена. На эти деньги можно собрать 2 китайских коптера - уверенно.
На этом все. Спасибо всем заинтересовавшимся! Задавайте вопросы, разбираться будем вместе.
Пока наше сообщество не так популярно, но я буду стараться привнести в него какого-то оживления.
В следующих постах напишу, как прошить Naza Lite на Naza V2 и как его настроить. Так же будет пост о настройке аппаратуры.
Удачных полетов, берегите себя ;)
Квадрокоптеры, фото и видео
2K поста3.1K подписчиков
Правила сообщества
только по теме сообщества