«Человек смертен. Мало того, он внезапно смертен», утверждал герой знаменитого романа Михаила Булгакова. Современного человека опасности подстерегают практически повсюду. И чем дольше существует наша цивилизация, тем больше люди задумываются о том, какой хрупкий наш мир и каждая отдельная жизнь в нем.
Человечество может погибнуть от эпидемии неизвестного заболевания, или после столкновения Земли с огромным метеоритом. Непродолжительная и хрупкая человеческая жизнь, которая может существовать только в узких границах физических параметров (гравитация, содержание кислорода, различные виды излучения), оказывается абсолютно непригодной для освоения далекого космоса. Впрочем, для освоения Луны и Марса она тоже мало пригодна. Представляете, как бы упростились космические полеты, без громоздких скафандров и систем жизнеобеспечения? А бывает, что отдельный человек ценен сам по себе для всего человечества: его интеллект, его передовая научная мысль, его лидерские качества. Но и ему на голову может упасть кирпич;)
Выход из этой ситуации дает новая наука сеттлеретика—наука о переселении сознания и личности человека из старого или мертвого мозга в резервную систему. В качестве резервной системы ученые предлагают использовать или молодой и здоровый мозг биоклона или кремниевый мозг киборга. Само слово «сеттлеретика» происходит от английского settler – переселенец. Эта новая наука пытается решить две задачи: чтение информации о сознании и личности из человеческого мозга (uploading) и запись информации на другой носитель (downloading).
Небольшой рассказ о этой науке.
А теперь подробней.
Что переселять?
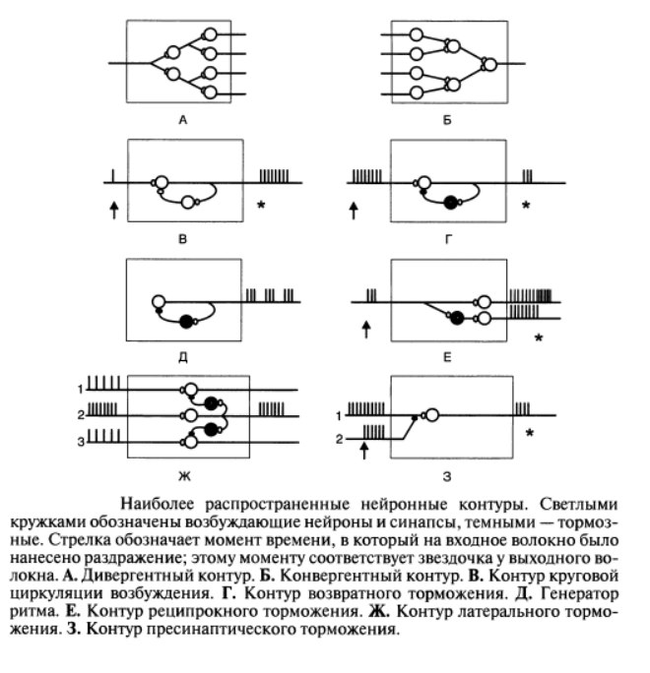
Чтобы ответить на этот вопрос, нужно знать принципы кодирования. Точно этого никто не знает, однако есть гипотезы и экспериментальные данные, позволяющие их оценить на разных функциональных уровнях. Начнем с нижнего уровня — с нервной клетки.
Не исключено, что для рассматриваемого проекта наиболее интересна модель работы нервной клетки и внутриклеточных уровней, которую построил доктор биологических наук Е. А. Либерман в 1965— 1990 гг. Согласно этой модели, внутри нейрона действует «молекулярная вычислительная машина», анализирующая входящую информацию. Программы такой машины закодированы структурой ДНК, а в результате ее работы нейрон вырабатывает последовательность электрических импульсов и веществ-медиаторов, передающих информацию посредством мембраны в другие нейроны или на управляющие органы.
Следующий уровень — межнейронные взаимодействия и популярная ныне среди нейрокомпьютерщиков гипотеза памяти с реализацией в виде сети так называемых «искусственных или формальных нейронов». На этом уровне, согласно концепции нейробиологов Г. А. Вартаняна и А. А. Пирогова, главный информационный элемент, «единица» нейрокода, — интервал времени между импульсами.
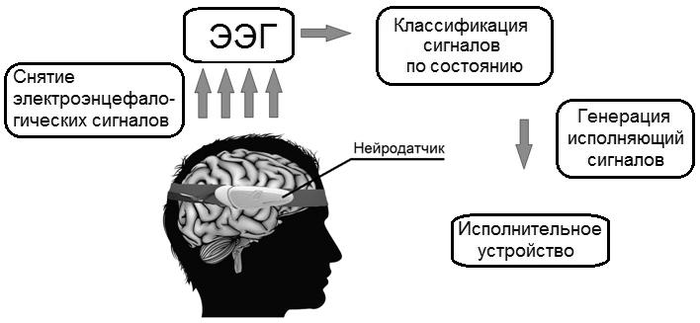
Самый верхний уровень — мозг как единое целое, о поведении которого судят с помощью различных энцефалограмм и томограмм, причем некоторые результаты удается трактовать в рамках теории самоорганизующихся систем. Например, в 1994 г. И. Пригожин упоминал работы, из которых следует, что "в стадии глубокого сна в активности головного мозга обнаруживается детерминистический хаос с фрактальным аттрактором в пятимерном пространстве».
Итак, попробуем построить технологическую схему «сквозного» согласованного нейрокодирования. На разных уровнях оно осуществляется следующим образом: в неокортексе в целом — аттракторами фазового пространства и игрой автоволн электромагнитных и химических «полей» мозга; в нейросети — межимпульсными интервалами; в мембране — структурой проводящих ионных каналов; в теле нейроклетки — активностью клеточных структур, в ядре нейроклетки — строением ДНК. Если эта схема верна, то процесс расшифровки сознания может перейти в научно-техническую плоскость.
Как переселять?
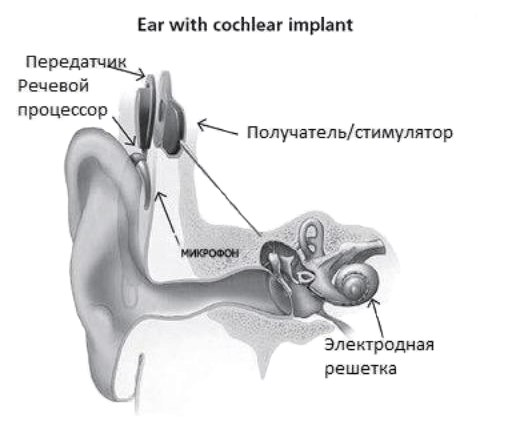
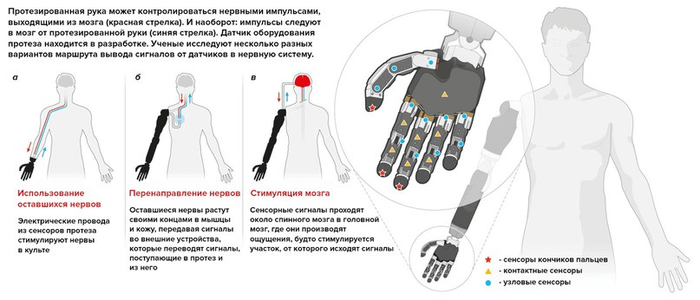
Вообще-то есть сведения (см. «Технику — молодежи», 1997, № 11) о том, что нейропротезами уже пытаются лечить спинномозговые травмы: врачи либо хотят управлять обездвиженными мышцами с помощью внешнего миникомпьютера либо вживляют в поврежденный участок спинного мозга микросхему. Но такие «вживления» для заявленного проекта — грубая и недостаточная полумера. Нужно расшифровывать информацию, а потом ее заново кодировать в новом носителе. Задача осложняется тем, что хочется не просто создать информационную копию, а обеспечить непрерывность жизни пересаживаемой личности.
Однако необязательно передавать информацию вовне из черепной коробки. Можно потихоньку создавать новый мозг, постепенно заменяя естественные нейроклетки искусственными и записывая в них всю текущую информацию. (Начало работ по моделированию искусственной мембраны, которая функционально подобна естественной и обучается в процессе жизни организма, описано, например. Л. Д. Бергельсоном.)
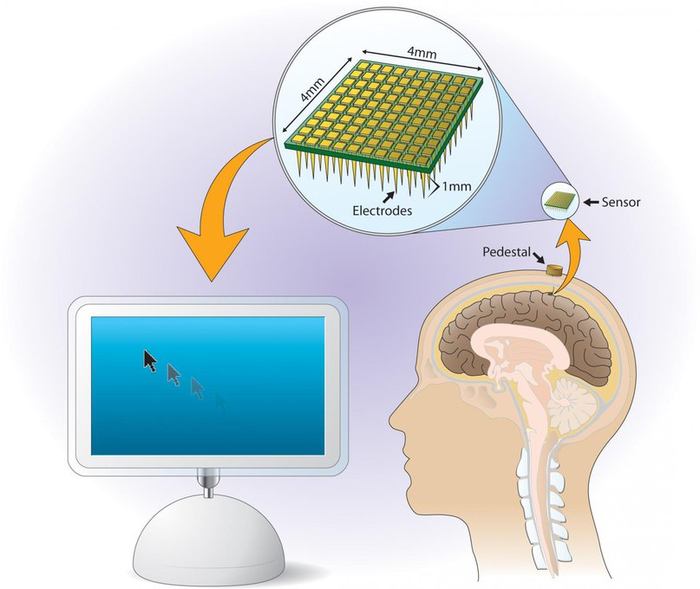
Если же речь идет просто о съеме информации с работающего мозга, то пригодятся томографы, благо их разрешающая способность уже достигла 0,05 мм2. Этого разрешения достаточно, чтобы наблюдать, например, за электрической активностью нервных клеток зрительного центра. Скорее всего, для съема кода межимпульсных интервалов нужно построить нейротомограф, работающий на уровне собственных резонансных частот нервов (дендритов и аксонов), по электромагнитному излучению которых можно попытаться рассчитать передаточные функции тел нейронов как «черных ящиков». Здесь следует учесть, что, по оценке автора настоящей статьи, гипотетическая собственная частота нервов должна быть порядка 10^13—10^15 Гц, то есть лежать на границе радио- и оптического диапазонов, и поперечные электромагнитные волны будут гаситься водно-липидной средой мозга.
Но даже если снять всю электрическую активность мозга-донора и записать ее в мозг-реципиент, то все равно нет гарантии точной передачи смысла информации. Нейроструктура мозга-реципиента, в том числе и клонированного от организма-донора, может отличаться от структуры «переселенца». Привести их в соответствие удастся, если мозг действительно представляет собой самоорганизующуюся среду. Тогда принципом «переселения» станет определение и передача параметров уравнений, описывающих динамику мозга «переселенца» как единого целого.
Куда переселять?
Первое, что приходит в голову, — это электронно-вычислительная машина. И наш академик В. М. Глушков, и американский профессор А. Болонкин считали, что развитие промышленности достигнет необходимого уровня к 2020—2035 гг.
Возможно, игра «на равных» компьютера «Дип Блю-2» в матче с экс-чемпионом мира по шахматам Гарри Каспаровым показала, что по порядку величины возможности человека и компьютера сравнялись. «Дип Блю-2» имел 160*109 компьютерных ячеек, анализируя за секунду 200*106 ходов (160*109*200*106=32*10^18), в то время как человек задействовал (1—2)*10^11 нейроклеток-ход/с. Тогда один «ячейко-ход» человека соответствует (0,8— 1,6)*108 машинных «ячейко-ходов». При средней «тактовой частоте» мозга 10 Гц (альфа-ритм) емкость нейрона оказывается не менее 1—2 Мб.
Как известно еще с середины семидесятых, например из работ американского нейрофизиолога В. Маунткастла, неокортекс построен из мини-колонок — вертикальных групп из 110 нейронов, с большим количеством связей по вертикали и малым по горизонтали. Миниколонки собраны в 600 тысяч макроколонок неокортекса. Мини-колонка управляет памятью в 220 Мб, макроколонка — в 220 Гб, а весь неокортекс — в 132 Тб. При этом производительность эквивалентного компьютера должна быть 1018 байт в секунду. Много это или мало? Примерно столько будет иметь машина с 1000 параллельно расположенными процессорами с тактовой частотой 1 ГГц, которые IBM обещает начать выпускать в 2002 году. Предел же производительности твердотельной электроники — 10^21 байт в секунду.
Однако пересадка сознания возможна не только в нейрокомпьютер, но и в носитель биологического происхождения. Успехи в генной инженерии и клонировании млекопитающих показывают, что серийное производство носителей с достаточно сложным строением, чтобы принять пересаживаемое сознание, дело не такого уж далекого будущего.
Не исключено, что к середине XXI века станет практически возможным регулярное «переселение» личности и сознания человека из стареющих организмов в молодые тела-биоклоны либо с помощью промежуточного нейрокибернетического «мозга-носителя», либо в результате прижизненного симбиоза и параллельной работы организма-оргинала и организма-дублера. Более того, сетевая организация виртуально бессмертных личностей может привести, по законам синергетики, к возникновению планетарного сверхмозга с общепланетарным сознанием.
А вот лекция самого автора это науки о ней.
Автора Сеттлерики зовут Корчмарюк Ян Илларионович
его вк https://vk.com/id83175417