Проект NMX04-1A
Всем привет!
Сегодня я расскажу о ныне мёртвом проекте - NMX04-1A.

Житель юга Аляски Карлос Оуэнс (Carlos Owens) с юных лет тянулся к масштабным проектам. Сына офицера ВВС США (родился Карлос на Филиппинах на американской военной базе) отчего-то интересовали вовсе не самолёты, а гигантские машины из фантастических романов и кинофильмов.

В 19 лет Оуэнс построил первую деревянную версию робота высотой 10,5 метров. Но то была скульптура, а не функциональный прототип.Поскольку в армии Карлос был механиком, а также освоил профессию сталелитейщика, в какой-то момент он понял, что опыта для создания истинного, как он говорит, «меха» («mecha») ему хватит.

Хотя, строго говоря, этот двуногий и двурукий гуманоид — не робот, а экзоскелет. Автор описывает свой проект:
«Типичный меха — это крупное робототехническое транспортное средство. Его главные особенности включают в себя большой размер 4,5-15 метров в высоту и вес в несколько тонн. В настоящее время такие машины существуют в мире кино, научно-фантастической литературе, комиксах и мультиках.»
Задача проекта Neogentronyx состояла в том, чтобы создать одного меха для практического использования в реальном мире. Его можно вооружить чем угодно в зависимости от ситуации: будет ли он военным, полицейским, строителем, пожарным или клоуном. Возможности и в этом отношении, по-видимому, безграничны.
Давление масла в гидравлической системе — 246 килограммов на квадратный сантиметр — этого вполне достаточно для приведения в движение 1,5-тонной машины. Одной из основных проблем, стоящих перед Карлосом, был, понятно, баланс: человек, сидящий в гигантском роботе, который не может встать после падения, подвергается смертельной опасности. Но Оуэнс не стал особо морочить себе голову по этому поводу — он просто удостоверился, что нижняя половина машины весит намного больше, чем верхняя.
Ну а будущее Карлос обрисовывает следующим образом: «Представьте, что вы — солдат, придавленный к земле вражеским огнём, отсечённый от своего отряда. Ситуация плачевна, по-видимому, никакого выхода нет, и надежда исчезает, поскольку неприятель всё ближе и ближе к вашей позиции.Вы пытаетесь вызвать подкрепление. Вскоре вы слышите это — звуки шагов, звуки, которых вы никогда не слышали прежде. Эти шаги приближаются, у вас возникает ощущение, что под этой тяжёлой поступью дрожит земля.
И вот появляются они — эскадрон машин. Они напоминают гигантских бронированных солдат, их движения быстрые и ловкие, они проворны как люди, просто больше по размеру. Машины оснащены передовыми гидравлическими системами, защищены бронёй, отлично вооружены. Они в состоянии в режиме реального времени выполнить любую задачу, поставленную их пилотами.»
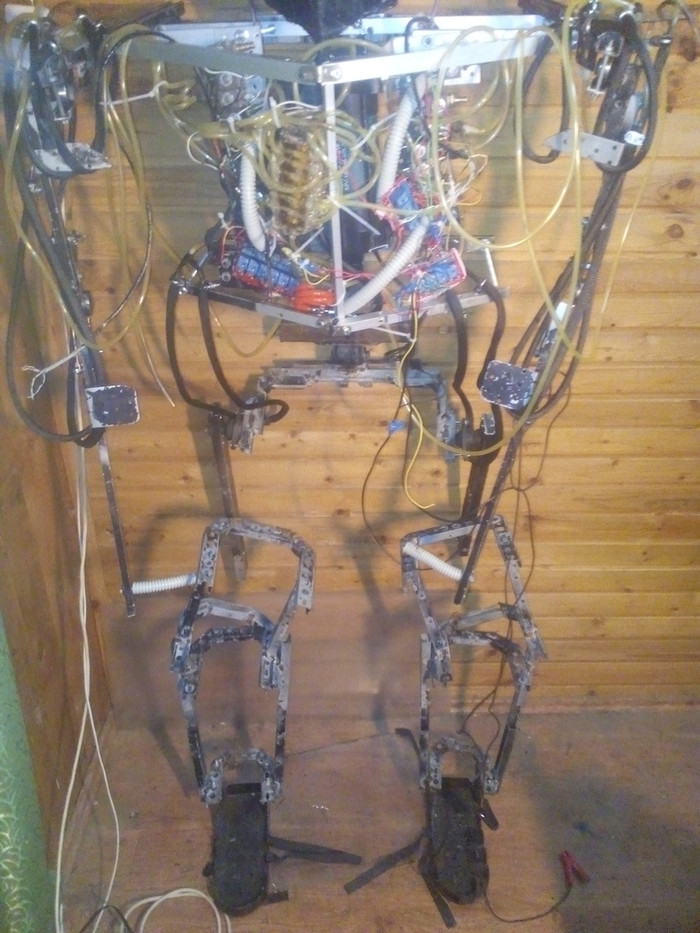
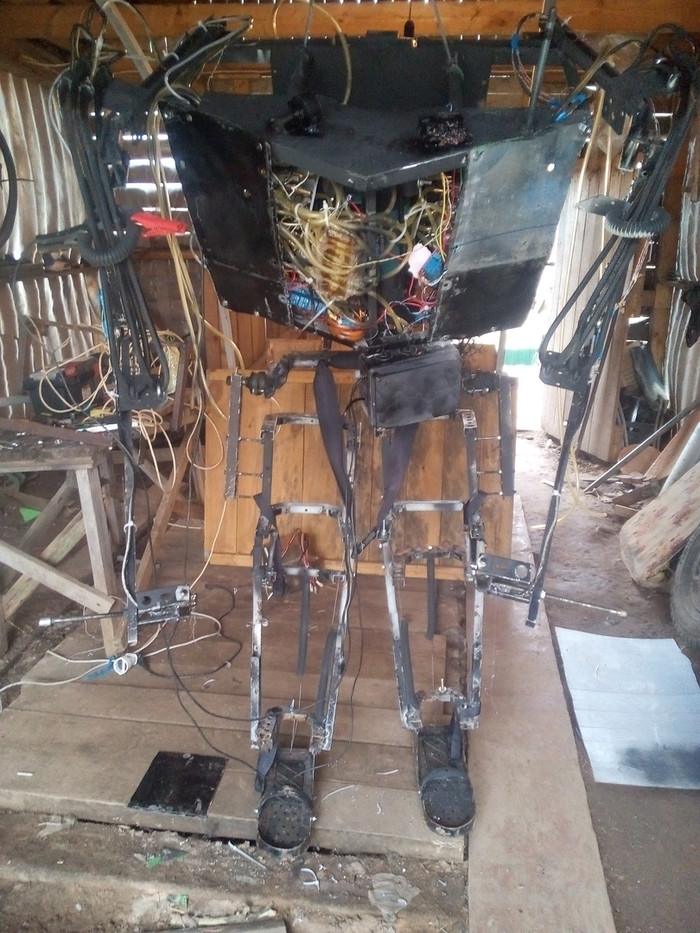
есть огнемет NMX04-1A полностью функционален и свободно стоит самостоятельно без необходимости подъема. , ноги и туловище имеют питание.
Прототип NMX04-1A - это шасси типа Меха, означающее Антропоморфный / Гуманоид. Спецификации:
Тип шасси:
Приблизительные размеры: Высота 18 фут Ширина 8,5 фут.
Вес: 3000 фунтов (1,5 тонны)
Мощность :18 л.с. двс
Привод: Гидравлические цилиндры
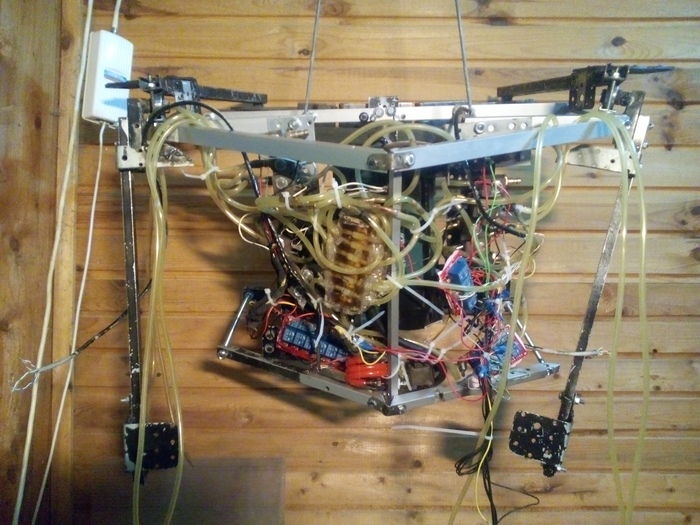
Несколько особенностей NMX04-1A:
12- вольтная электрическая система
Ключ зажигания зажигания
Система освещения
3000psi гидравлическая система ,
40 степеней возможного движения.
Стабилизаторы веса.
Съемные ножные пластины для увеличения тяги.
2 огнемета, по одному на каждую руку.
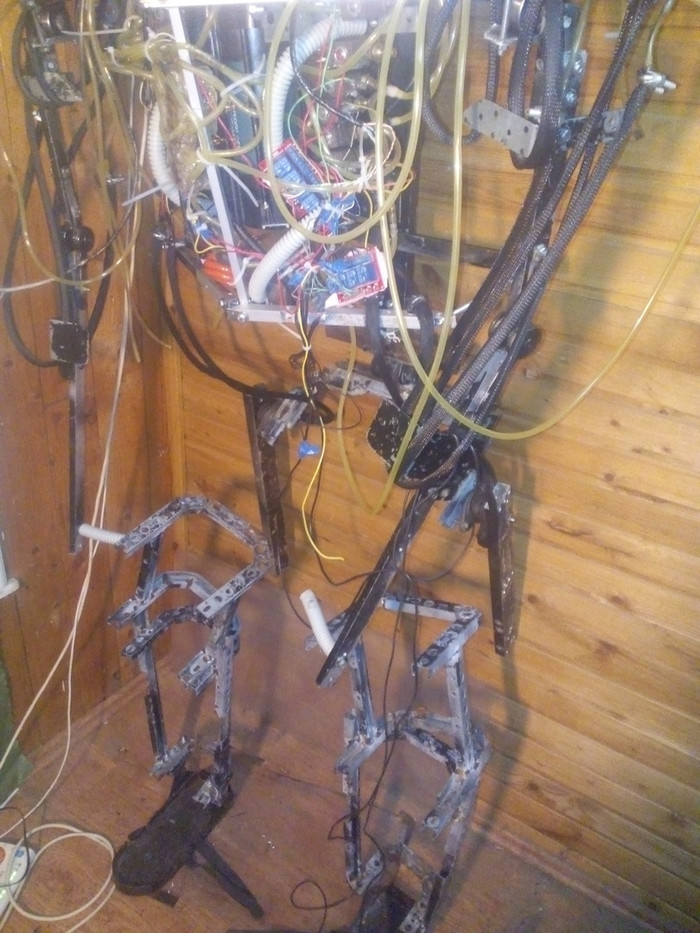
Этот прототип пилотируется одним человеком и прост в эксплуатации. Все средства управления находятся в пределах досягаемости оружия.
Ноги робота управляются педалями, а руки джойстиками. Все механистично и является вариацией специфичного гидроусилителя. Существуют вторичные опоры, которые гарантируют, что положение ног NMX04-1A не будет изменяться неумышленно.Хотя он разработан с функциональными элементами управления для перемещения ног, имейте в виду, что это всего лишь прототип; он не может делать массивных шагов. Будущие модели будут иметь эту возможность.
Он может быть переоборудован и модернизирован, чтобы при желании использовать более мощный двигатель и гидравлическую систему.
Рассказ самого автора о мехе.
Сам разработчик считает так:
Вначале наши мехи будут использоваться в развлекательных целях и в конечном итоге будут приспособлены для боя на большой арене, предназначенной для размещения этих великих машин. Пилотное управление - это специальная система, называемая системой ручного управления интеграцией (имитацией) интерфейса меха, разработанная специально, чтобы позволить механизму имитировать любое движение, выполняемое управляющим пилотом меха.
NMX04-1A — первая попытка разработки полностью функционального опытного образца в рамках проекта Neogentronyx и скорее всего последняя . Проект полностью закрыт уже более 13 лет.
СПАСИБО ЗА ВНИМАНИЕ.
Не забываем что есть группы и дискорд, где можно прочитать про подобное или же задать вопрос.