RAPTOR

Показать полностью
2
Одна вакансия, два кандидата. Сможете выбрать лучшего? И так пять раз.

экспериментальный вертолет Contraves с пилотом перед запуском. (источник фото:Heli-Archiv Wernli).
В середине сороковых годов прошлого столетия - летательный аппарат под наименованием - "хеликоптер", он же "вертолёт" начал постепенно набирать популярность и доказывать свои возможности, как в военной, так и в гражданской сфере.
До того, как одновинтовая схема (с одним несущим и хвостовым винтами) была практически повсеместно принята в вертолётостроении (в настоящее время большая часть вертолётов имеет именно такую схему), у некоторых изобретателей по всему миру возникла идея установить импульсные (или реактивные двигатели) на законцовки лопастей несущего винта. Всё это дело было связанно с простотой конструкции, в отличии от других вертолётов различных схем.
В длинный список компаний, опробовавших это решение, входит и швейцарская компания Contraves (эта компания была основана в Эрленбахе в 1936 году), построившая в 1950-х годах одноместный прототип с нестандартной системой управления. Этот вертолёт долгое время оставался малоизвестным и "окутанным завесой тайны". Удалось собрать в этой статье немногочисленные сведения об этом вертолёте.
Начиная с 1955 года, эта компания приступила к разработке одноместного прототипа, под руководством инженера Сленцеля (который позже переехал в США), проектировался он для военных целей, как вертолёт разведки и связи.
Задумывался этот вертолёт, как "быстро складывающийся" и транспортируемый в автомобиле, в частности в военном джипе. По замыслу конструктора, для управления этой моделью не требовалось практически никакого лётного опыта.
Вертолёт (который, по-видимому, так и не получил официального обозначения) имел 6-метровый двухлопастный несущий винт, приводимый в движение двумя импульсными реактивными двигателями, разработанными этой же компанией Contraves. Двигатели имели диаметр около 80 мм и создавали тягу около 15 кг каждый. Ротор вращался со скоростью около 600 об/мин.

Импульсные реактивные двигатели были установлены на отдельных стержнях, на этом снимке на переднем плане видна одна из двух импульсных реактивных установок, установленных на экспериментальном вертолете Contraves. (источник фото: Heli-Archiv Wernli).
Импульсные реактивные двигатели были установлены на отдельных стержнях с профилем крыла, расположенном перпендикулярно лопастям на расстоянии около 1,50 м от втулки несущего винта (смотри фото выше, то есть не на самих лопастях, такого я не видел ни в одной подобной схемы, довольно оригинально и вполне разумное решение, на мой взгляд).
Топливо подавалось к импульсным реактивным двигателям с помощью двойного поршневого насоса, который находился в 30-литровом топливном баке, а сам бак служил опорой для кресла пилота.
С помощью двух рычагов пилот регулировал подачу топлива и, соответственно тем самым увеличивал или уменьшал мощность. Расход топлива оценивался примерно: 60 литров в час.
Металлические лопасти были оснащены гидравлическими амортизаторами, и они соединялись со втулкой несущего винта с помощью шарниров.
Втулка несущего винта устанавливалась сверху металлической конструкции. Также имелся баллон со сжатым воздухом, который использовался для запуска импульсных реактивных двигателей.

На переднем плане - органы управления и приборы, используемые на экспериментальном вертолете Contraves. (источник фото: Heli-Archiv Wernli).
Имелась у вертолёта и приборная панель, на которой были установлены некоторые важные элементы управления и приборы: - прибор, измеряющий скорость вращения НВ; - манометр, показывающий давление воздуха в баке; - двойной индикатор расхода топлива, индикатор запаса топлива (топливомер); - клапан, закрывающий подачу топлива, - и электрический выключатель.
Описать каким образом управлялся этот аппарат мне будет сложно, но я постараюсь, надеюсь Вы поймете как это работало....
Вертолёт имел нетрадиционную систему управления, основанную на простом смещении центра тяжести.
(Среди пионеров, выдвинувших эту идею, был авиационный инженер Чарльз Хортон Циммерманн (1908-1996), который в 1930-х годах пришёл к выводу, что обычного балансирования человека достаточно для управления небольшим летательным аппаратом.
Его теории были окончательно подтверждены, когда в начале 1950-х годов была построена летающая платформа Hiller VZ-1 Pawnee. Эта концепция, названная Циммерманом "кинестетическим управлением").
В прототипе Contraves сиденье пилота было установлено над баком и могло перемещаться вперёд и назад. Перемещая свой вес (а значит, и центр тяжести), пилот, пристегнутый страховочным ремнем к трубе перед грудью, мог выбирать, в каком направлении двигаться. Перемещая своё тело влево или вправо, так он получал боковое управление.

Ноябрь 1957 года - прототип вертолета Contraves проходит испытания в сельской местности недалеко от Делемона. В целях безопасности летательный аппарат удерживается тросами. (источник фото: Heli-Archiv Wernli)
Передвигая правой рукой ручку вверх-вниз, пилот управлял углом наклона лопастей (то есть рычаг коллективного или же общего шага). Поворотом ручки пилот управлял подвижным стабилизатором (изготовленного из лёгкого алюминиевого сплава). Несущая труба стабилизатора крепилась к опоре втулки несущего винта.
У вертолёта было небольшое обычное полозковое шасси с колеёй около 100 см.
Вес пустого аппарата составлял около 30 кг, а максимальный взлётный вес оценивался в 140 кг.
Лётные испытания проводились в сельской местности близ городка Делемон. Испытания проводились на привязи, под управлением пилота - испытателя Г. Янотти. Во время одного такого испытательного полёта, летательный аппарат упал и был повреждён, восстановлению не подлежал, пилот при этом не пострадал, отделавшись незначительными ушибами.
Попытки воссоздать проект и оснастить его обычным бензиновым двигателем была отклонена, а впоследствии проект окончательно был свёрнут и забыт.
Это всё, что мне удалось найти об этом причудливом летательном аппарате...
Да ещё в дополнение сама компания Contraves начала свою деятельность в середине 1930-х , и основным её направлением было - разработка и создание зенитного оружия, каким образом она занялась проектированием вертолёта, для меня остаётся загадкой.....
17 мая 1942 года после пятидневного перелёта по маршруту с завода Сикорского в Стратфорде (штат Коннектикут, до Райт-Филд, штат Огайо), преодолев расстояние в 1224,7 километра, лётчик-испытатель Чарльз Моррис и Игорь Сикорский прибыли на военную базу в Райт-Филд (Дейтон, штат Огайо) с целью доставить первый вертолёт Vought- Sikorsky XR-4 для армии США.

Vought-Sikorsky XR-4 41-18874 в Райт-Филд, штат Огайо, 17 мая 1942 года. Фото из архива: Sikorsky Historical Archives.
Моррис подлетел прямо к административному зданию базы и приземлился там. Его и Сикорского приветствовала большая группа руководящего состава армии и представителей приёмки вертолёта.
Перелёт был довольно утомительным, из-за низкой скорости и небольшой дальности полёта вертолёта XR-4. Расстояние было преодолено за шестнадцать отдельных полётов, с общим временем полёта 16 часов 10 минут. Самый длинный одиночный полёт длился 1 час 50 минут, что в то время стало новым мировым рекордом продолжительности полёта вертолёта. Игорь Сикорский присоединился к Лесу Моррису на последнем этапе полёта.
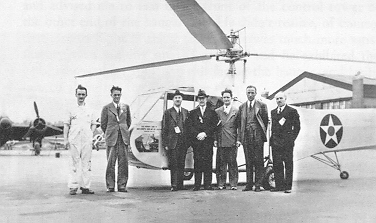
Sikorsky XR-4 41-18874 на Райт-Филд, 17 мая 1942 года. Слева направо: Э. Уолш, А. Планефиш, Игорь Сикорский, Орвилл Райт, Р. Алекс, Лес Моррис, Б. Лабенски. Фото из архива: Sikorsky Archives.
Немного о самом вертолёте: изначально именуемый Vought-Sikorsky VS-316A (который затем получил обозначение XR-4 в авиакорпусе армии США и серийный номер 41-18874) -это вертолёт одновинтовой схемы, то есть с одним несущим винтом и одним рулевым винтом путевого управления.

XR-4C
Это был двухместный вертолёт с расположенными рядом сиденьями и сдвоенным управлением. Трехлопастный несущий винт имел диаметр 11,582 метра и вращался против часовой стрелки, если смотреть сверху. Трехлопастной рулевой винт был установлен справа от хвостовой балки и вращался по часовой стрелке, если смотреть с левой стороны вертолёта.

Vought-Sikorsky XR-4C 41-18874 в Национальном музее авиации и космонавтики США. Источник: NASM.
XR-4 имел длину 10,351 метра и высоту 3,785 метра. Пустой он весил 911,7 кг, а максимальная полная масса составляла 1152,1 кг.

Первоначально VS-316A оснащался семицилиндровым радиальным двигателем Warner Aircraft Corporation Scarab SS-50 (R-500-1) с воздушным охлаждением рабочим объемом 8,19 литра мощностью в 145 лошадиных сил.

Для вертолёта XR-4 двигатель был модернизирован до семицилиндрового радиального двигателя Warner Super Scarab SS185 (R-550-3) с прямым приводом и рабочим объёмом 9,100 л, и имел мощность в 185 лошадиных сил. Двигатель был расположен в вертолёте задом наперёд, при этом гребной вал приводил короткий карданный вал через сцепление к 90-градусной коробке передач и трансмиссии. Двигатель Р-550-3 весил 156 килограммов
Вертолёт XR-4 в дальнейшем был переименован в XR-4C после ряда доработок. И эта его модификация официально считается первым в мире серийно выпускаемым вертолётом на тот момент.
Справились? Тогда попробуйте пройти нашу новую игру на внимательность. Приз — награда в профиль на Пикабу: https://pikabu.ru/link/-oD8sjtmAi

Совершает посадку на аэродромный участок дороги на учениях
Тг канал AviaticA