
Почему на велосипеде тормозной диск это ротор?
Почему тормозной диск на велосипеде называют именно ротор? Наверно плохо искал, но я так и не понял почему именно так.

Почему тормозной диск на велосипеде называют именно ротор? Наверно плохо искал, но я так и не понял почему именно так.
Для движения электрического транспорта, лифтов высотных зданий, насосов, работы станков, медицинских томографов и хирургических роботов используются линейные двигатели. Они обеспечивают точность, скорость и надежность работы. Однако существующие конструкции нередко сталкиваются с проблемами: высокое напряжение, сложность изготовления и перегрев приводят к низкой эффективности, риску короткого замыкания и остановки оборудования. Ученые Пермского Политеха модернизировали линейный двигатель: уменьшили его размер, снизили напряжение и упростили производство, что особенно важно для мембранных насосов, которые используются в самых различных сферах – например, в системах кондиционирования для подачи топлива в двигателях, перекачки сточных вод и создания давления в дыхательных медицинских аппаратах.

Фото: Simon Kadula, Unsplash
Статья опубликована в журнале «Russian Electrical Engineering», том 95, №11, 2024. Проект выполнен при поддержке Федерального государственного бюджетного учреждения «Фонд содействия развитию малых форм предприятий в научно-технической сфере» (Фонд содействия инновациям), договор № 4790ГС1/80304 от 23.11.2022.
Линейные двигатели — это устройства, которые преобразуют электрическую энергию в движение без дополнительных механических передач, что повышает надежность и снижает износ составляющих. Они используются в лифтах, заводских станках, электронике и некотором медицинском оборудовании. Их конструкция состоит из неподвижной части (статор – корпус с магнитами или катушками) и подвижного элемента (ротор). Когда на катушки подается ток, создается магнитное поле, которое «бежит» подобно волне, а ротор «догоняет» его, двигаясь по прямой линии. Таким образом создается не вращение, как в обычных электродвигателях, а прямолинейное движение. Это позволяет механизму работать быстрее при меньшем износе.
Для небольших систем, где важна точность позиционирования – в мембранных насосах, вентилях, клапанах, затворах, хирургических роботах и топливных системах автомобилей – используется одна из разновидностей линейных двигателей – короткоходовые. Это «рабочие лошадки» для задач, где важны скорость, точность и миниатюрность – например, в современной микроэлектронике, медицине и высокоточном производстве.
Однако при существующем методе проектирования для равномерного длительного движения такого механизма требуется большее напряжение и меньший ток, а крупные габариты усложняют изготовление. Это ограничивает их применение в компактных устройствах, таких как мембранные насосы, которые используются во многих областях – от нефтегазовой отрасли до водоочистки и медицины.
Ученые Пермского Политеха разработали схему модернизации короткоходового линейного двигателя, которая позволит устранить эти недостатки, сделав его более компактным и надежным.
— Мы поменяли режим работы машины, что привело к изменению методики расчета. Благодаря этому габариты устройства стали меньше, само оно легче, и производство стало проще — теперь его части помещаются на небольшие токарные станки. Замена внешних подшипников на внутренние позволяет поддерживать воздушный зазор по всей длине, а установка мощных магнитов — отказаться от питания движимого штока, – комментирует Денис Опарин, старший преподаватель кафедры «Электротехника и электромеханика» ПНИПУ.
Уменьшение размеров двигателя позволяет использовать удобные крепления и не делать внутренние системы жидкостного охлаждения, ограничившись только внешними вентиляторами.
Двигатель с новой конструкцией прошел серию тестов в программе для моделирования Ansys Maxwell, где проверялась его работоспособность при различных условиях. Был создан прототип, где измерялись его максимальное усилие, ускорение и нагрев. Результаты показали увеличение силы тяги, лучшее позиционирование и стабильное функционирование даже при повышенных нагрузках. Так, максимальная сила двигателя (если кратковременно увеличить ток) составляет 50 кг, в то время как обычная рабочая сила — 41.21 кг. Он не перегревается: стабильная температура равна 51°C. При резком старте двигатель кратковременно совершает «рывок силы» на 2250 Ватт.
Модернизированный линейный двигатель с коротким ходом демонстрирует значительный прогресс в области компактных и эффективных приводов. Его улучшенные характеристики открывают новые возможности для применения в промышленности, медицине и робототехнике.
Синхронные двигатели с постоянными магнитами широко используются в робототехнике, промышленных приводах, электрогенераторах, насосах для перекачки нефти и воды и других системах, где важны точность и динамика. Традиционные методы управления требуют наличия датчиков положения и скорости, однако их применение ограничено условиями эксплуатации: они могут быть слишком чувствительны к вибрации и ударам, подвергаться воздействию электромагнитных помех, не работать при высоких температурах, возникающих в двигателе. Все это приводит к неточным показаниям или поломкам. Ученые Пермского Политеха предложили новый метод бездатчикового управления синхронным двигателем, который поддерживает широкий диапазон скоростей и нагрузок, при этом требуя меньше вычислительных ресурсов. Статистические ошибки этой системы составляют менее 1%.

Статья опубликована в журнале «Russian Electrical Engineering», т. 95, №11, 2024. Исследование выполнено в рамках реализации программы академического стратегического лидерства «Приоритет 2030».
Двигатели бывают синхронными и асинхронными. Оба вида имеют статор и ротор – статичную и подвижную часть соответственно. При включении оборудования обмотка статора создает магнитное поле, которое вращается и приводит в движение ротор – так механическая энергия преобразуется в электрическую. В асинхронном двигателе ротор вращается немного медленнее, чем магнитное поле статора, в синхронном же их быстрота одинакова. Благодаря этому последний вид двигателей считается более точным и применяется там, где нужна постоянная скорость – станки, роботы, манипуляторы, генераторы.
Для управления синхронными механизмами традиционные системы полагаются на специальные датчики положения и скорости ротора. Несмотря на свою эффективность, они усложняют систему и могут быть подвержены поломкам, особенно в жестких условиях эксплуатации – при воздействии высоких или низких температур (как в двигателе внутреннего сгорания автомобилей), вибраций и ударов (в экскаваторах, бульдозерах, кранах и другой строительной технике).
Бездатчиковый подход значительно упрощает конструкцию и снижает стоимость оборудования. Однако здесь возникает другая проблема: в таких системах сложно точно определить положение ротора на низких скоростях и на самом старте двигателя. Если система управления некорректно оценивает эти параметры и «думает», что двигатель вращается с одной скоростью, а на самом деле – с другой, то она будет подавать неправильные управляющие сигналы. Могут возникнуть и проблемы со стартом: двигатель может запуститься в неправильном направлении, с рывками, вибрациями, или не запуститься вообще.
Ученые Пермского Политеха разработали новый метод управления синхронными двигателями с постоянными магнитами без использования традиционных датчиков. Его преимущество в том, что он обеспечивает уверенный запуск оборудования, способен управлять двигателем в широком диапазоне скоростей и нагрузок, при этом требуя меньше вычислительных ресурсов. Это не только снижает затраты, но и повышает надежность системы.
Подход политехников позволяет оценивать положение ротора двигателя не используя датчики, а непосредственно по его токам и напряжениям. Сначала эти параметры считывает система управления двигателя. Затем они обрабатываются адаптивным наблюдателем состояния, который оценивает положение ротора. Если полученные данные не совпадают с теми, которые он предсказал, наблюдатель автоматически корректирует свою работу. Эта информация используется для точного управления токами в двигателе даже при изменении нагрузки.
– Одной из ключевых проблем в бездатчиковом управлении является оценка положения ротора на низких скоростях, где традиционные методы часто не работают. Мы решили эту проблему, разработав специальный алгоритм управления. Сначала магниты ставятся в начальное положение (0о наклона) и двигатель начинает постепенно разгоняться, поддерживая заданный ток – это похоже на плавное нажатие педали газа в машине. Когда скорость достигает нужного уровня, система переключается с начальных настроек на управление с обратной связью, когда система «следит» за своей работой и автоматически подстраивается, чтобы двигатель работал правильно. Это позволяет делать разгон двигателя с нулевой скорости, при этом требуя меньшего количества процессорного времени на реализацию, – рассказывает Евгений Солодкий, доцент кафедры микропроцессорных средств автоматизации, кандидат технических наук.
Для проверки достоверности вычислений систему протестировали с помощью математического моделирования.
– Численный эксперимент продемонстрировал способность модели надежно запускать двигатель и поддерживать точное управление скоростью даже при значительных колебаниях нагрузки. Результаты показали, что статическая ошибка при оценке скорости вращения составляет менее 1%, что означает устойчивость модели к изменениям параметров двигателя, – поясняет Данил Савенко, студент кафедры микропроцессорных средств автоматизации.
Метод бездатчикового управления, разработанный учеными Пермского Политеха, обеспечивает не только возможность запуска синхронного двигателя с постоянными магнитами без использования специальной техники, но и высокое качество управления скоростью при относительно простой реализации. Он также снижает стоимость и сложность систем.
«Ротор» продлил контракт с главным тренером Денисом Бояринцевым.
Новое соглашение клуба из Волгограда с бывшим игроком «Спартака» рассчитано по схеме «1+1».
«Рады сообщить, что Денис Бояринцев продолжит свою работу на посту главного тренера нашей команды. Вместе с Денисом Константиновичем мы вышли в Первую лигу и в ходе летне-осеннего этапа доказали, что являемся отличной командой, которая способна на достижение высоких задач»
заявил генеральный директор «Ротора» Павел Никитин.
«Я благодарен руководству за оказанное доверие. Сейчас наша основная задача — на должном уровне провести весеннюю часть сезона, в межсезонье провести качественную работу по подготовке команды к следующем сезону»
ответил Бояринцев, который возглавляет команду с мая 2024 года.
После 24 туров Мелбет Первой лиги «Ротор» с 33 очками занимает восьмое место.
Также в номере ...
А потом, отработанные карьеры называют национальными парками или другими чудесами света, и вуаля, новая история готова. На фото явно выпотрошенные карьерные рудники, даже со следами от гусениц или колес . Но, за последние 200 лет там никто и никогда никаких работ не вел.



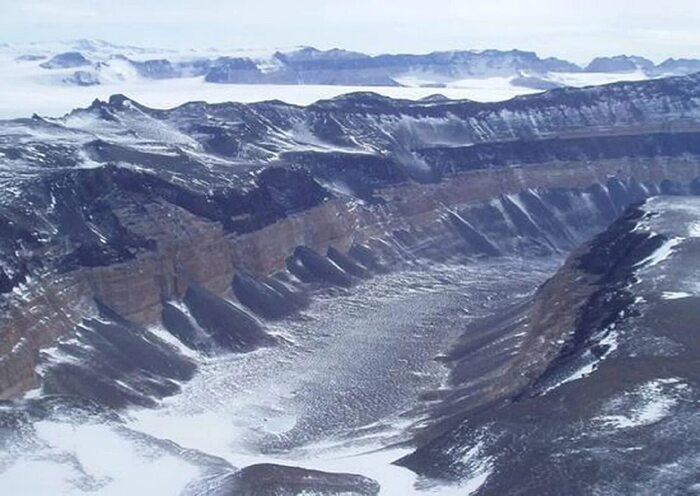

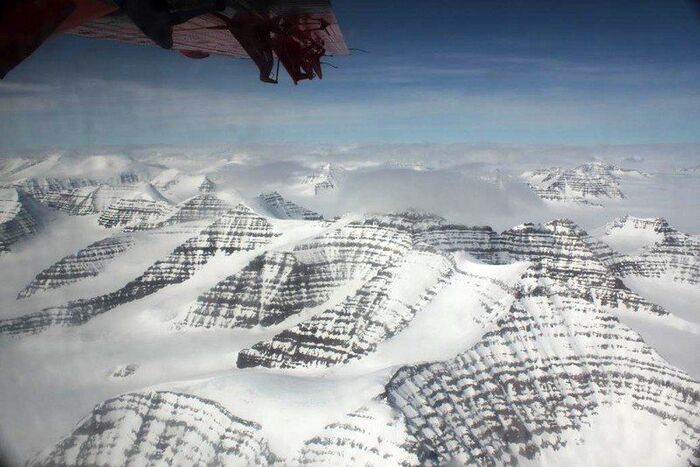

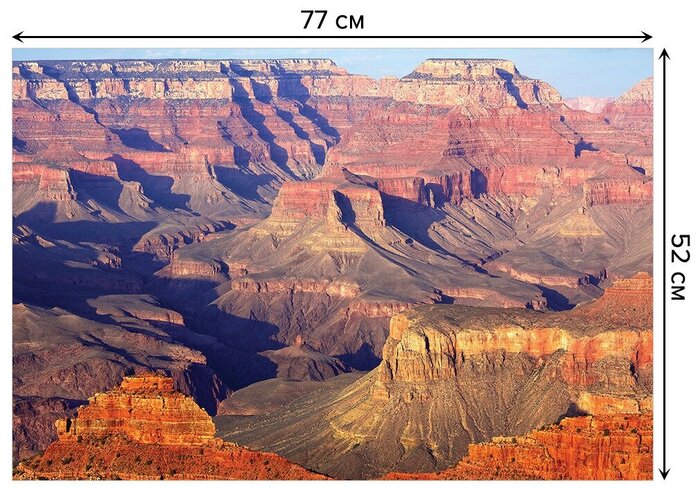



Четкий срез, есть даже отвалы отработанной породы. И это лишь мааалллееенькая часть доказательств, что мы лишь живем на руинах предыдущих, гораздо более развитых цивилизаций. Учитывая масштабы тех работ, по всей планете был снят пласт земли метров в 100. Да и сама наша планета выглядела совершенно иначе.
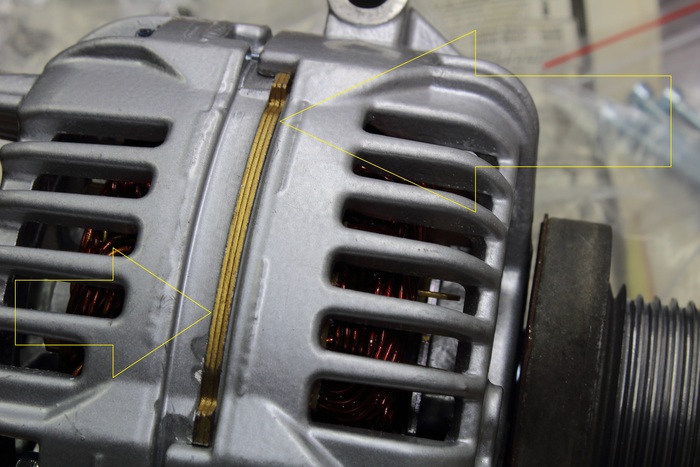
Перед установкой ротора нужно зачистить место прилегания кромки передней крышки генератора со статором по всей окружности.

Бортик статора, за счёт которого он держится между передней и задней крышек генератора так же зачищаем до блеска и ставим в переднюю крышку в правильном положении. Обмотка статора предварительно была покрыта термолаком.

Данный статор был ещё проверен, когда генератор стоял на автомобиле- мотор-тестером.
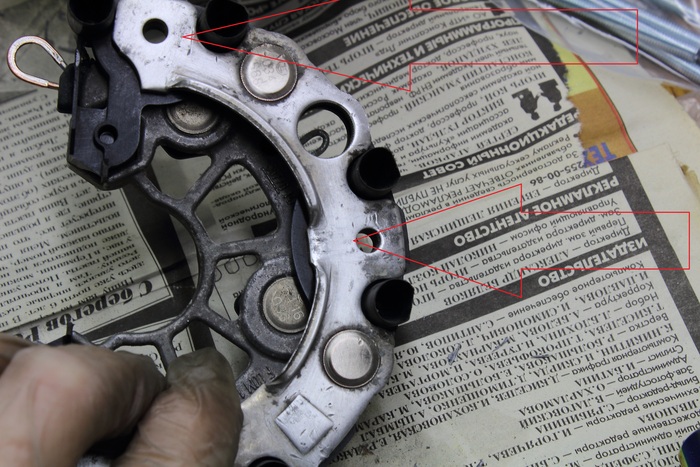
С задней крышкой генератора поступаем так же: зачистка кромок прилегания к статору.

Дополнительно нужно зачищать ещё и упоры на крышке так как слой порошка после покраски немного мешает при соединении передней крышки генератора с задней(
Точки контакта "массы" задней крышки с диодным мостом так же чистим.

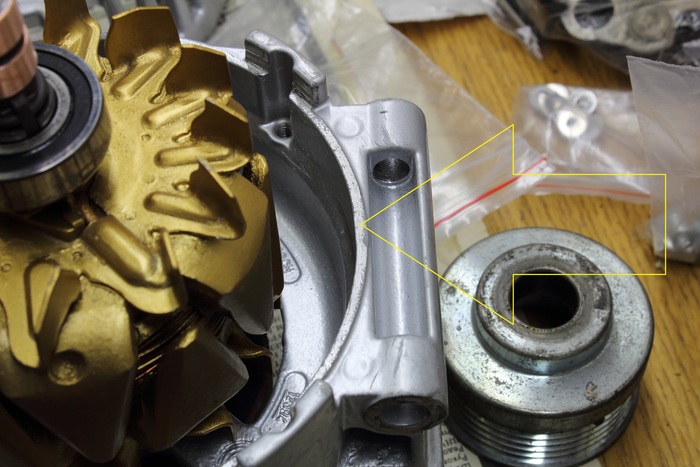
Посадочное место под проставочное кольцо(колпачок) так же немного зачищаем.

Устанавливаем колпачок в заднюю крышку генератора и прикручиваем всё это 4 болтами.
Винты передней крышки использовал новые под головку на 8
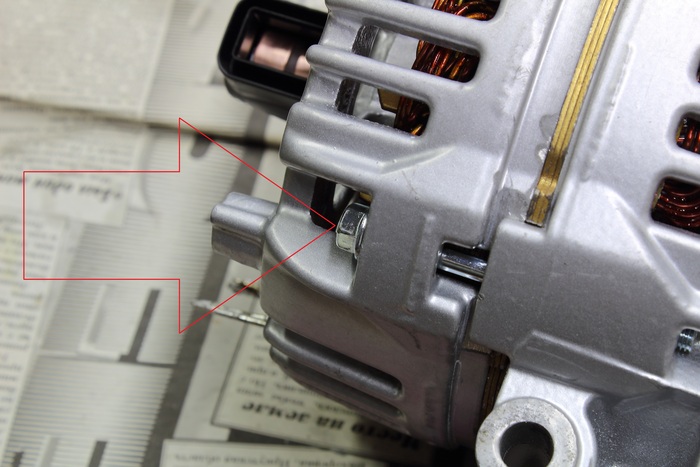
Винт М5х60 AZM 0731
Он правда немного длиннее оригинального, но в целом не критично.
Винт М5х60 AZM 0731
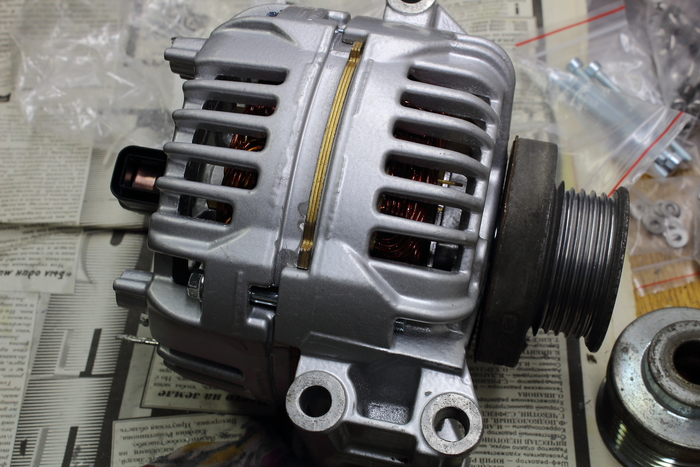
Проверяем что бы обе крышки генератора плотно зажимали статор-не должно быть зазора.
На вывода статора я иногда одеваю простую термоусадочную трубку. Хотя на диодном мосту есть направляющие каналы для выводов обмоток статора, но привычка что-то добавить осталась)

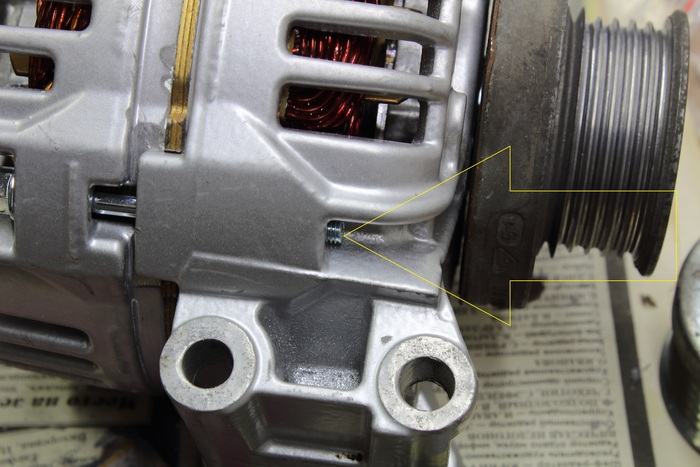
Винты крепления передней крышки генератора изначально хотел использовать вот такие, но уже были заказаны недорогие аналоги оригинальных. Поэтому решил ставить аналог.

Винт 5х70 DIN 912 нержавейка А2
Диодный мост проверил мультиметром: плюсовые диоды 560 Ом, отрицательные 554 Ома. Диоды можно проверить и прозвонкой: в одну сторону пищит, а в другую тишина). Под нагрузкой диоды проверяю зарядным устройством и фарной лампой 12V70W-данная проверка делается так же как и проверка прозвонкой.
Зачищаем до блеска точки контакта диодного моста с задней крышкой
Контактные болты и их площадки так же зачищаем. Петельки диодного моста к которым припаиваются выводы обмоток статора зачищаем и облуживаем. Петлю диодного моста к регулятору напряжения чистим
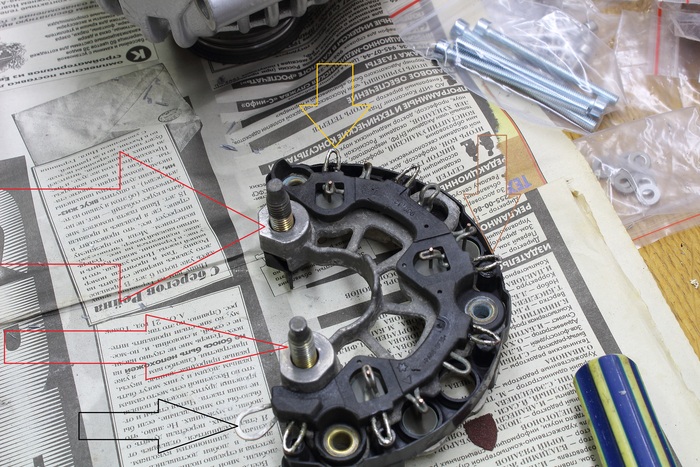
Площадки к которым прикручивается регулятор напряжения зачищаем. Одна площадка это масса регулятора напряжения, а другая... не помню...

Регулятор отмыт и проверен на внешние дефекты.На регуляторе напряжения длина щёток составляет=11 мм. Более чем достаточно. Пружинки отличные, щётки не заедают в корпусе регулятора напряжения.
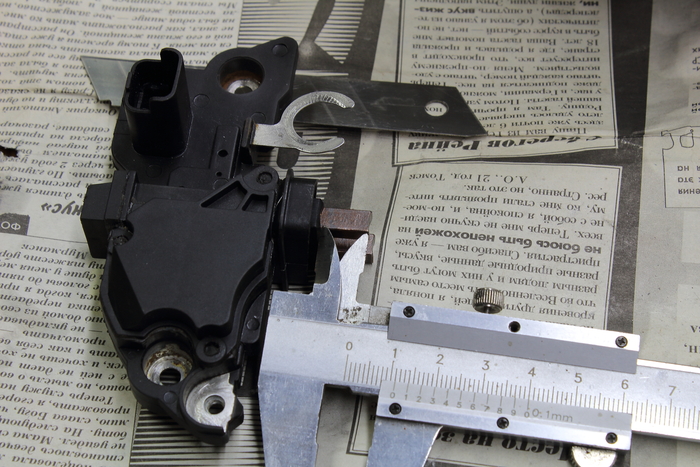
Плюсовая клемма регулятора напряжения зачищена и покрыта термолаком, кроме точки контакта.
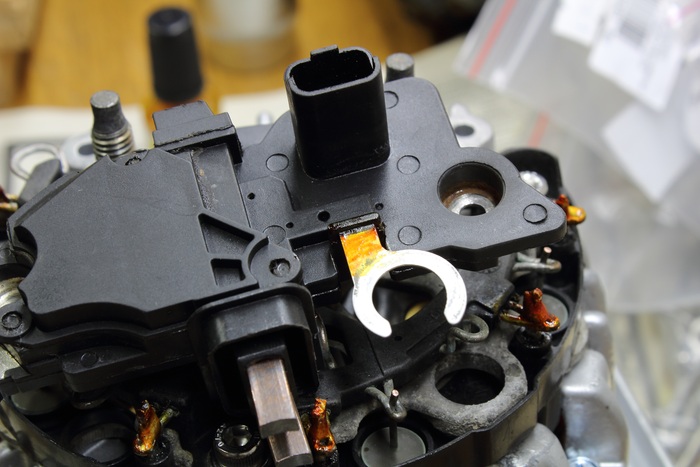
Данный вывод часто страдает в следствии чрезмерного усилия затягивания контактной гайки диодного моста. И в результате этого клемма лопается в месте захода в корпус регулятора напряжения.
Ставим на место диодный мост и прикручиваем его тремя винтами. Поджимаем петельки контактов с выводами обмоток пассатижами и пропаиваем.

Покрываем контакты термолаком.
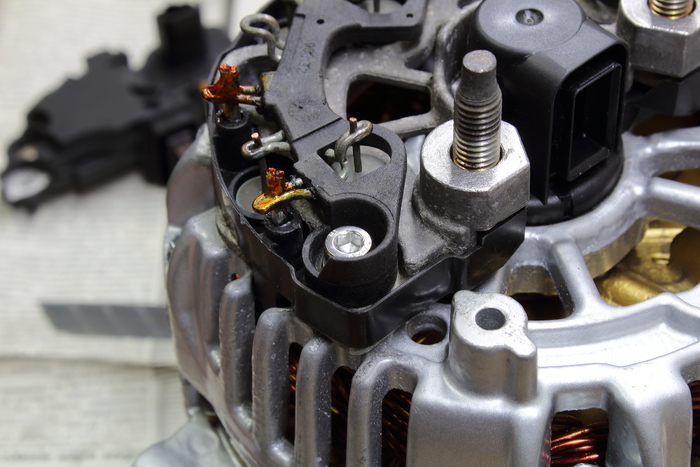
Паяю я не очень хорошо(
Но будем учиться)
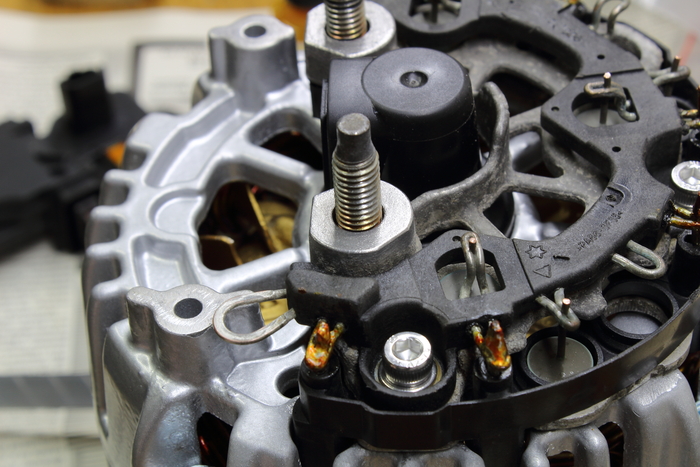
Болт крепления диодного моста к задней крышке использовал такие-Винт 5х20 DIN 912 нержавейка А2 под внутренний шестигран+ шайба плоская 5 DIN125 нержавейка А2
Винт 5х20 DIN 912 нержавейка А2+шайба пл. 5 DIN125 нержавейка А2
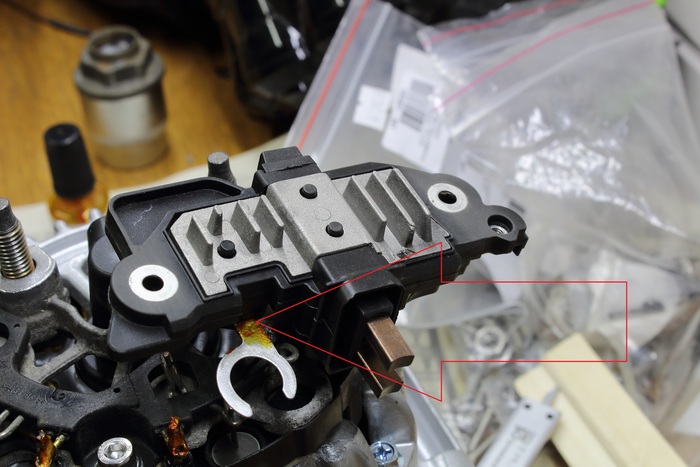
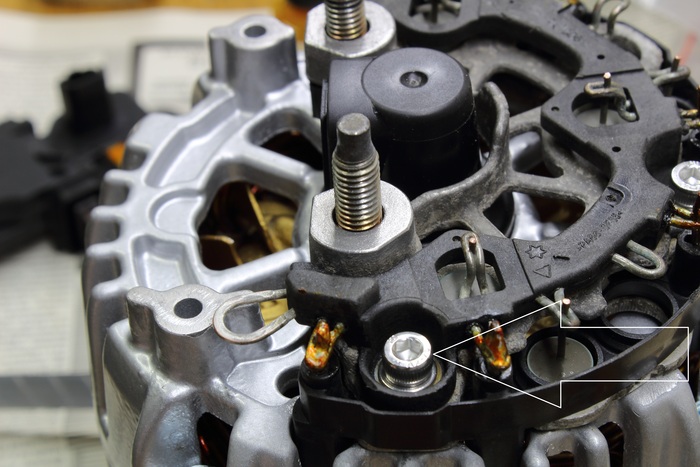
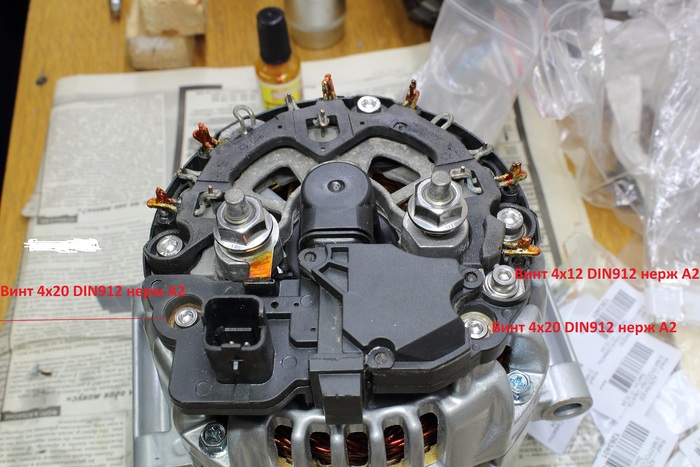
Устанавливаем регулятор напряжения на место и прикручиваем его тремя винтами:
-Один винт 4х12 DIN 912 нержавейка А2+шайба плоская 4 DIN125 нержавейка А2
-Два винта 4х20 DIN 912 нерж А2+ 2 шайбы пл. 4 DIN125 нержавейка А2
Перед сборкой генератора хотел покрывать тонкой полоской электропроводной смазки плоскости прилегания передней крышки и статора, задней крышки и статора, задней крышки и диодного моста. Но что-то засомневался в этом. Написано что для клемм аккумулятора: но что имеется в виду: наносить смазку поверх клемм или же место контакта вывода аккумулятора и клеммы? В итоге оставил так.

Смазка клемм и разьёмов LIQUI MOLY 50гр.
...Продолжение следует...





