Процесс сборки 150 роботов MiniCheetah
150 статоров:

150 корпусов переднего привода с установленным выходным подшипником:

50 запчастей верхней части ноги:

Отвертки Wera:

450 планетарных передач с установленными игольчатыми подшипниками:

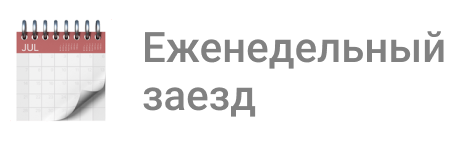
150 шестеренок, готовых к установке в корпуса:

Солнечные шестерни (центральная часть планетарной передачи):
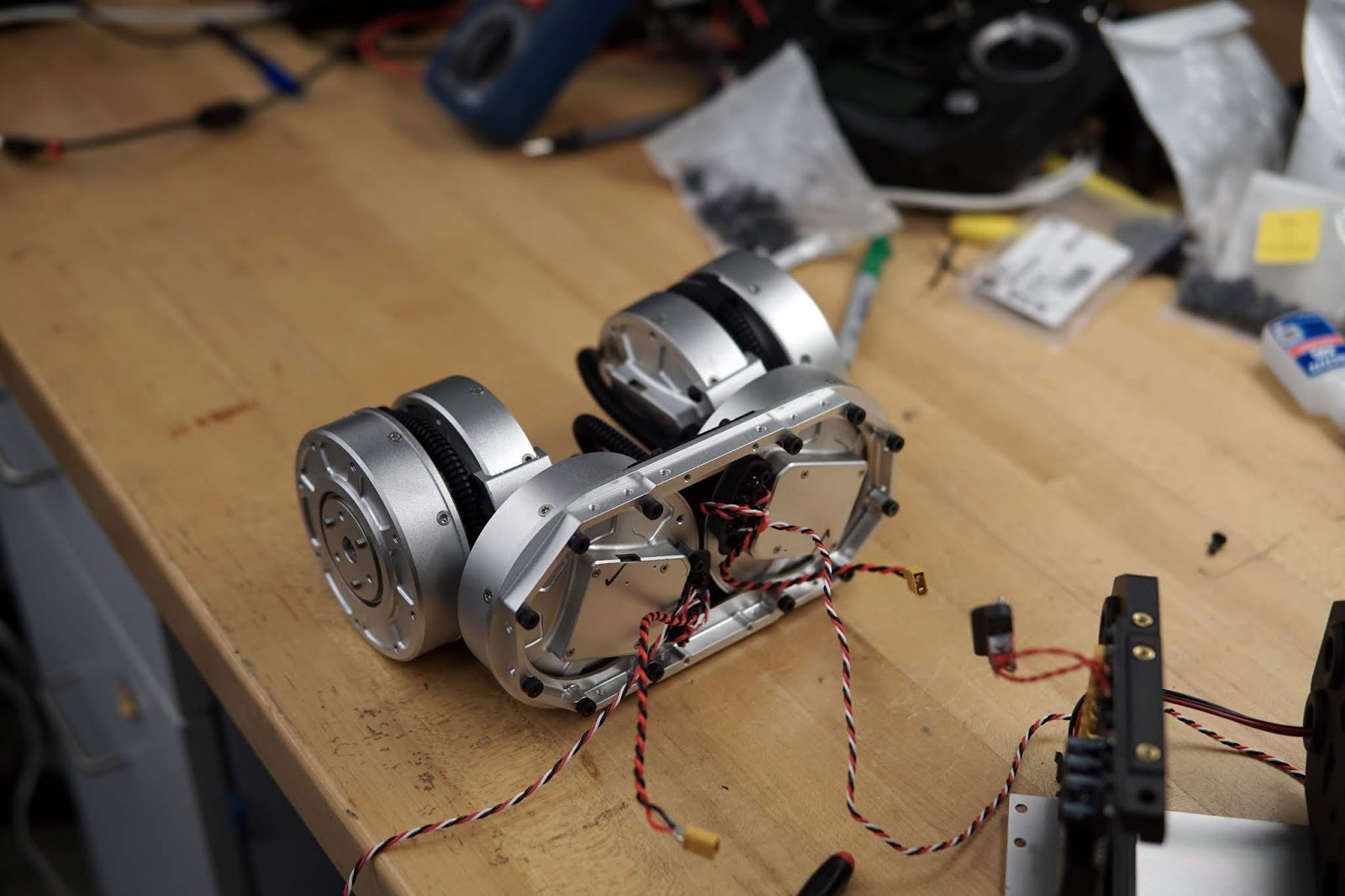
Актуатор с установленными статором и передачей:

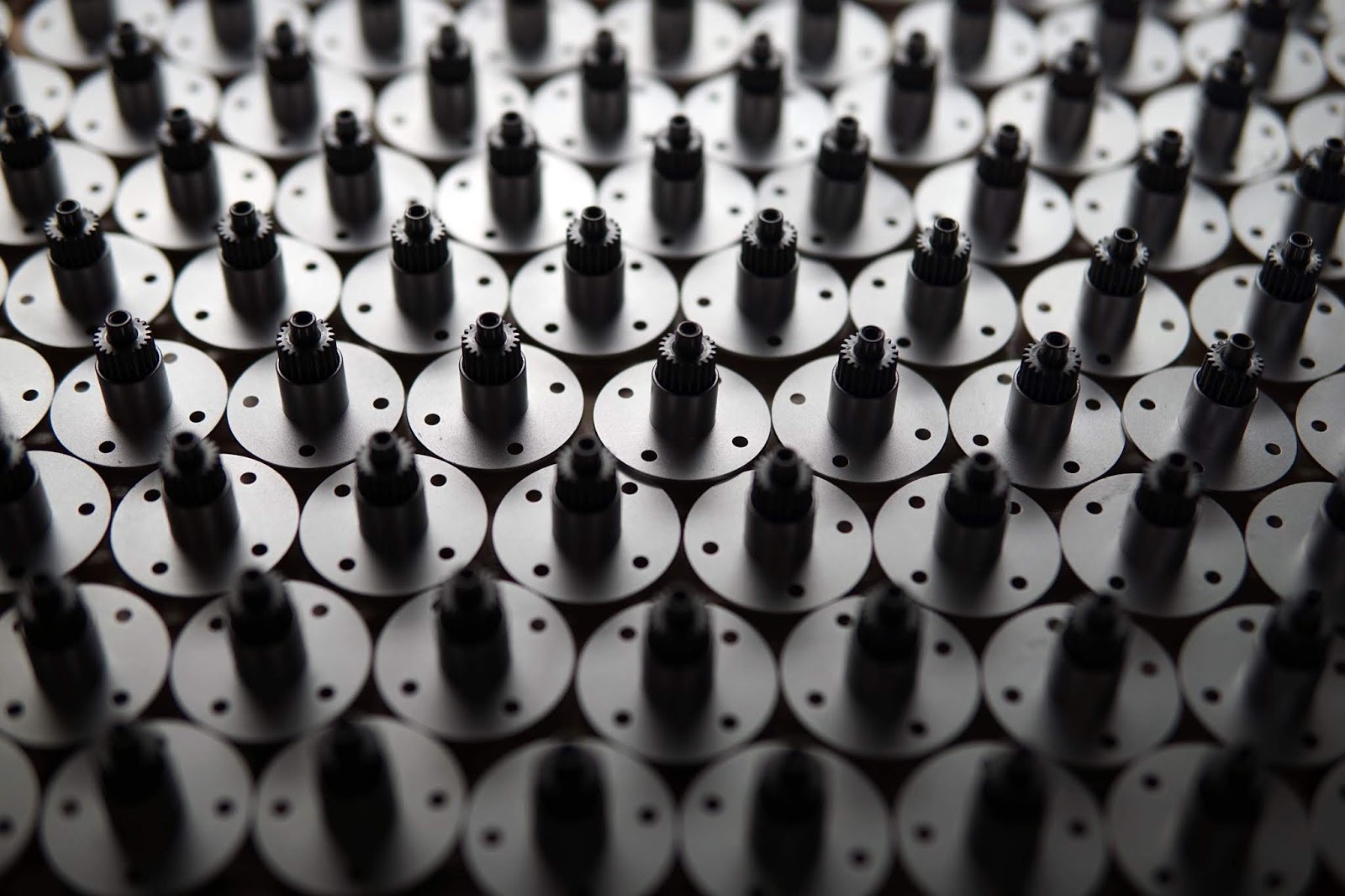
При проектировании была допущена ошибка, в результате которой некоторые отверстия были сдвинуты примерно на 1 мм. С помощью этой приблуды были размечены и просверлены правильные отверстия:
150 собранных актуаторов:

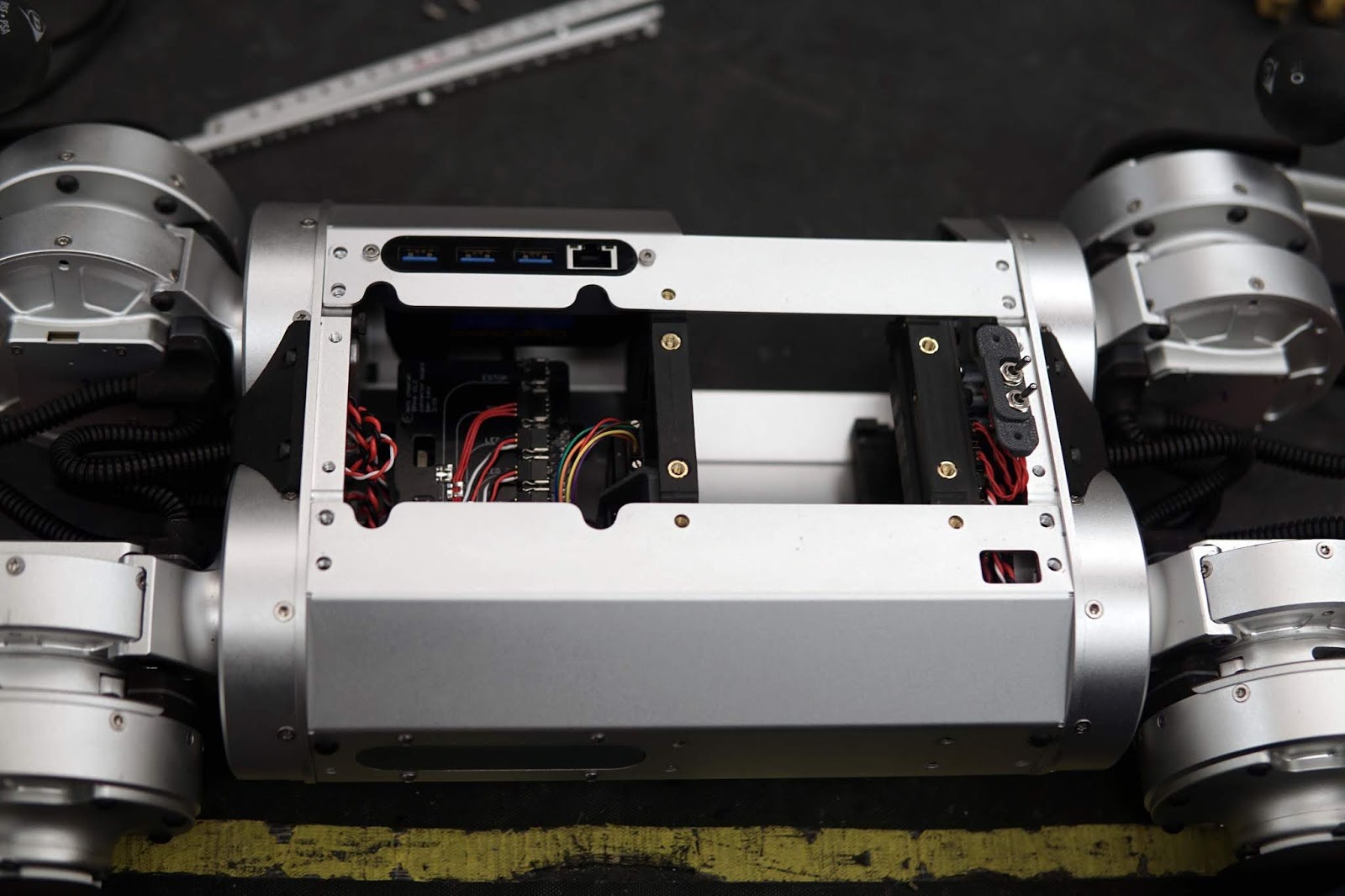
Часть тела робота с компьютером, интерфейсом CAN, акселерометром, радиоприемником и блоком питания:

Еще собранные актуаторы:

Компьютеры

Блоки питания и центральные пластины туловища роботов:

Ноги с установленными ремнями. Затем на них будут установлены натяжные устройства и внешние части корпуса:

Практически полностью собранная нога:

Практически полностью собранный робот :)
Тест электронных систем и программного обеспечения:

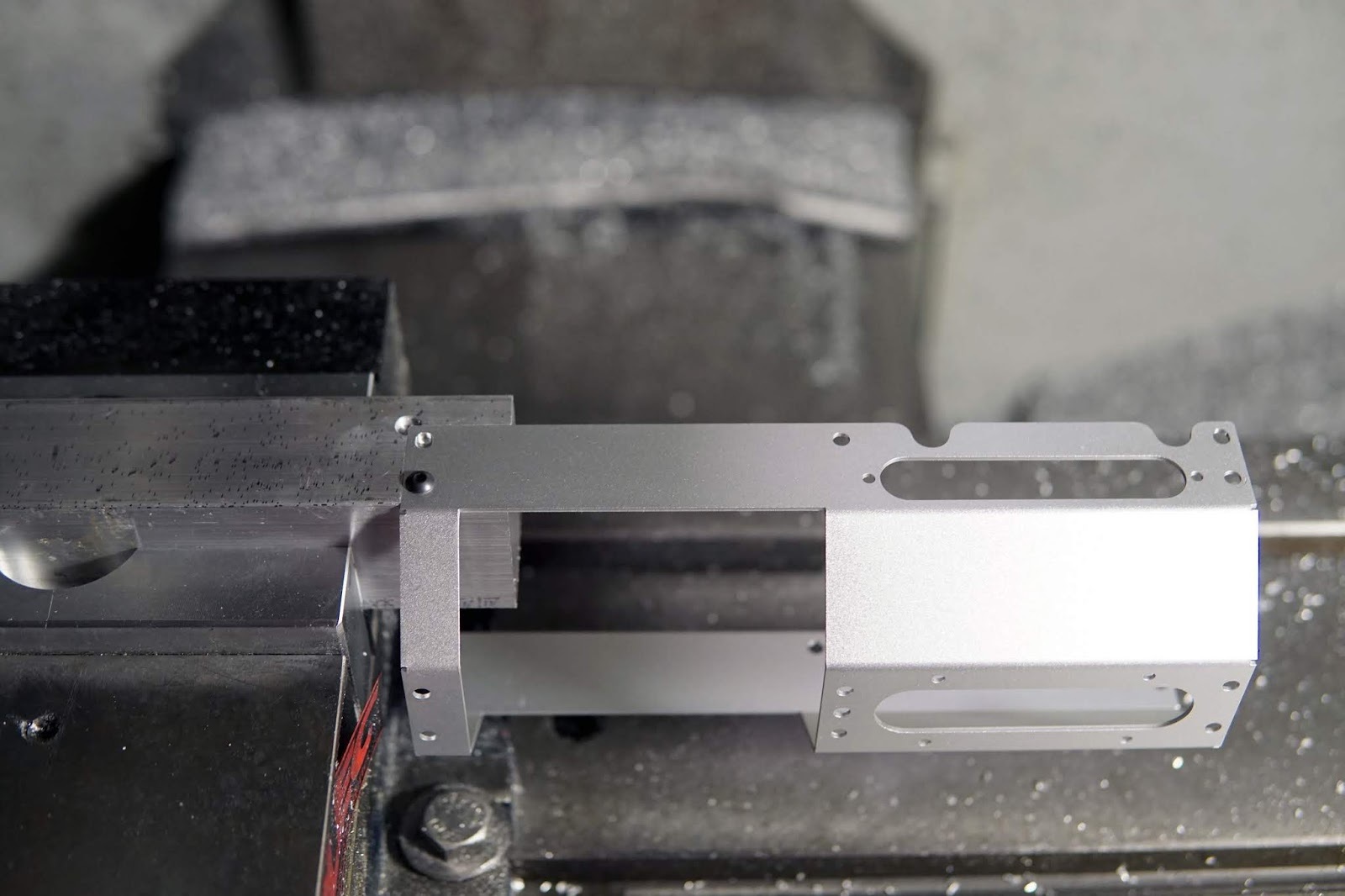
Половинка робота:
Финальный шаг в сборке - присоединение ног к туловищу

Собранный робот со снятой верхней крышкой:
Пара роботов в ожидании финального тестирования:

Несколько рообтов в финальной сборке:
