
Переделка метательного планера в самолёт.
Всем привет. С аппаратурой я наигрался, время что-нибудь запустить. Как на зло все полимерные аккумы оказались дохлыми, да и страшновато сразу что-то серьезное об землю бить, тем более идея дать порулить ребенку не отпускает.
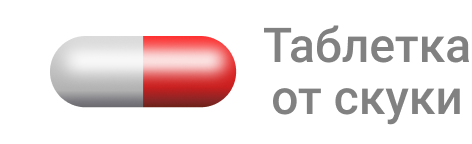
А дочка тем временем развлекается пуляя в воздух метательные планеры из ерр. Вот такие:

Прародитель этих игрушек был планер Multiplex FOX. Отличная штуковина и лет 10 назад мы с товарищами уже баловались их переделкой в rc , правда и сам планер и начинка тогда стоили не в пример дороже. Сейчас то китайцы подсуетились и такой планер стоит как пачка сигарет или мороженое :)
В общем выбор пал на тот что побольше. Осталось придумать как им управлять.
Вариантов было 2: взять плату приемника+сервы от вертолета wltoys v911, либо использовать более серьезные комплектующие с того же бангуда или хоббикинга. Остановился на втором варианте - и тяги больше, и возможностей в компоновке и вертолет разбирать не надо, его мы время от времени запускаем :)
Набор вышел такой:
- приемник dsm2 6 каналов с бангуда уже был в наличие, но так его цена баксов 5 не более.
- сервы hobbyking s0361 3.6 грамма 2 штуки
- мотор turnigy f1104-4000kv 5.5грамм
- регулятор 6а turnigy
- bec 5в 1а ( вот сложно было 3 детали в регулятор добавить?)
- аккумы GensACE 2s 450mah
в общей сложности было потрачено ~25$ без учёта аккумов( ещё 15, но покупались они в Минске, а это сразу +100% накрутки от цены АлиЭкспресс или другого китайского магазина )
По поводу компоновки долго думал и решил остановится на тянущем винте в носу и винглеронах. Летать с рулём поворота и высоты на таком мелком самолетике жуть как неудобно, а если тягать элероны одной машинкой получается некрасиво. Приступаю!
Сначала сделал лонжерон/ось. В дело пошла бамбуковая палочка, полоска карбона и трубочки от сока в роли втулок. Тут я перестраховался - карбон никчему, можно было просто взять шпажку для шашлыка. Но ничего, крепче будет.
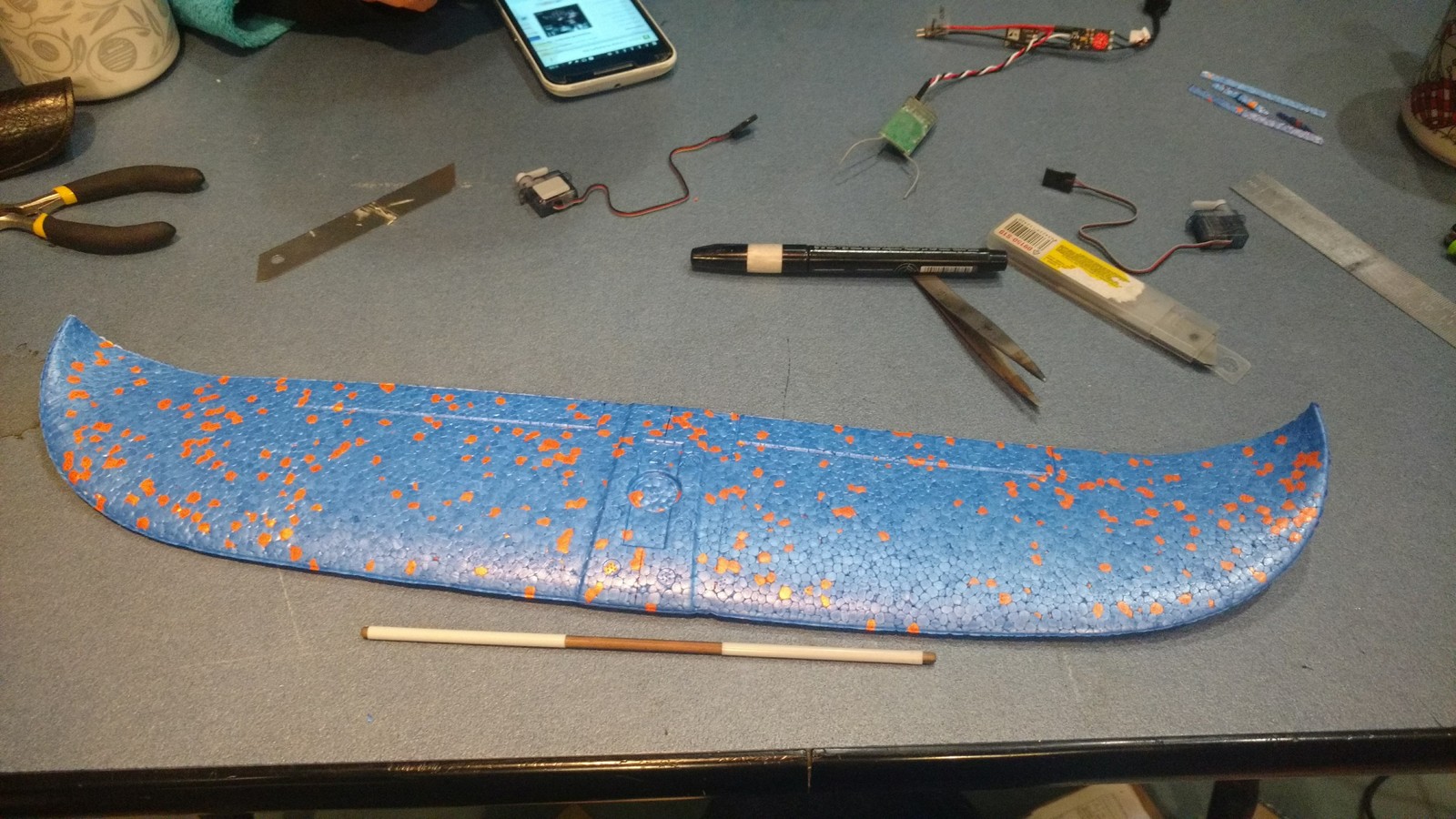
Делаем прорезь в крыле, приклеиваем все это на термоклей и разрезаем крыло на 3 части.
Дальше как в тумане :) центральную часть крыла и стабилизатор приклеены к фюзеляжу на суперклей, сделаны прорези под сервы и аккум.

В районе кабины вырезан лишний пенопласт для приемника и регулятора.
Вместо носа приклеил 3 слоя 1мм бальсы, но можно было обойтись и тонкой фанерой, просто бальсу ножем резать легче, а в 3 ночи пилить лобзиком как-то так себе.

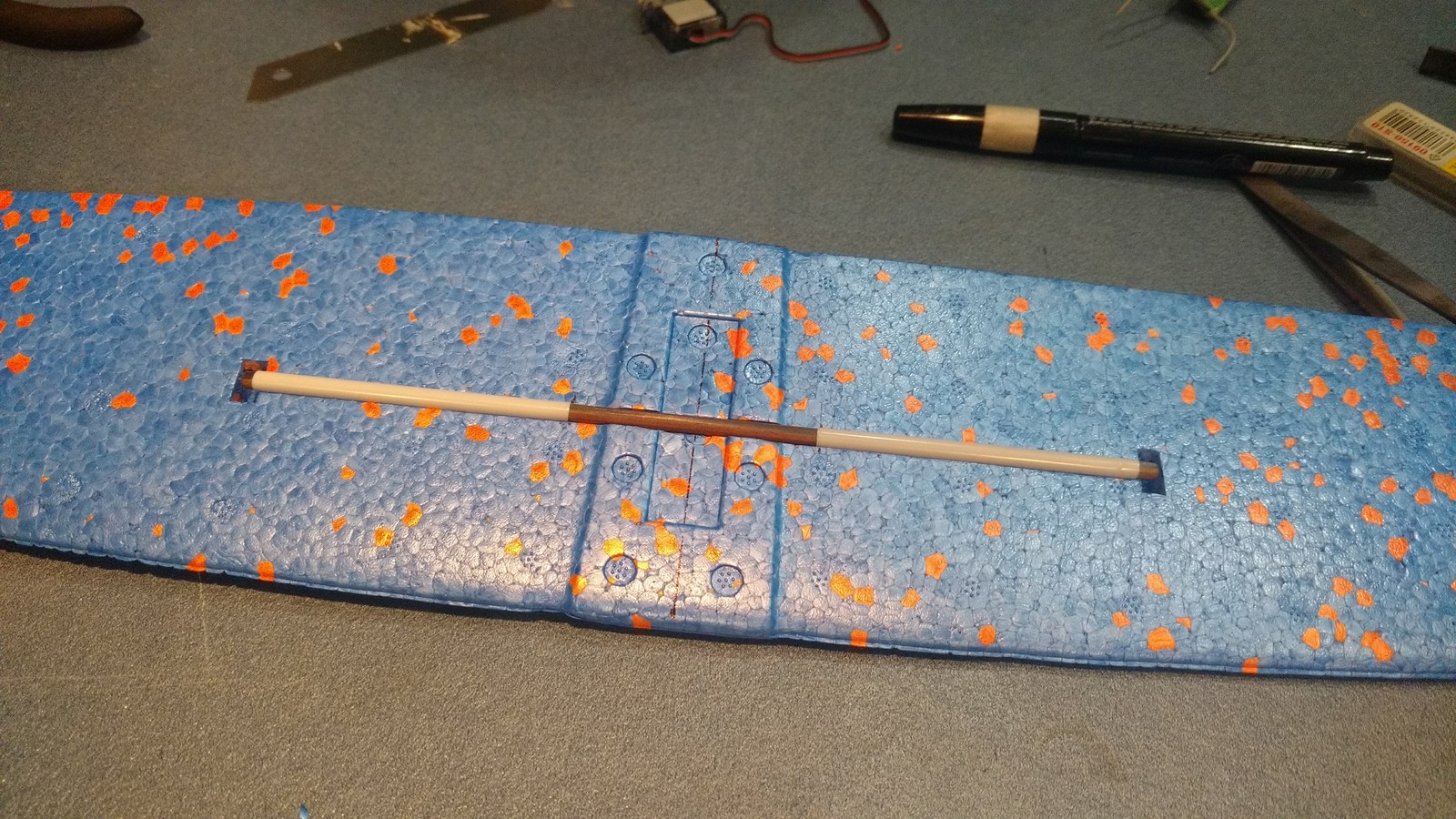
А вот и мотор. Тут я лоханулся в первый раз - мотор CW - вращается по часовой, шток с резьбой м4... Правильно, с ЛЕВОЙ резьбой, а гайки нету. Ну не беда, проточил шток до 3мм и начал резать резьбу м3, но не тут то было - обламываются витки... Или у меня плашка тупая или китайцы из какого-то особого пластилина моторы делают. Оставил пока как есть, пару витков есть и хорошо, винт не улетает.
В месте где в консоли приходит ось и тяга от машинки наклеил по слою шпона бальсы, лишним не будет, но можно и без такого эстетства

После сборки вышло что центровка дико передняя, либо вешать на хвост лишние 6 грамм, либо что-то думать. Передвинул сервы и аккумулятор ближе к хвосту - обожаю ерр, хочешь режь, хочешь клей - все ему ни по чем :)

Кабина на магнитах, под капотом места ещё полно.

Ну и результат:

Винт 3*2 деревянный, тк я лоханулся ещё и с заказом винтов и вместо 3*2 купил 2.5*1. Тяги у мотора и так немного, а тут ещё и пропеллер не оптимальный. Пришлось потратить ещё 30 минут на это забытое колдунство и превратить кусочек клена в пропеллер.
Собственно и все. Будут вопросы по конструкции - отвечу. Летает весьма весело, но мотор я бы поставил побольше, чтобы похулиганить можно было. Думаю 1106 будет в самый раз для такого планера.
ТТХ:
размах 480мм
длина 450мм
масса взлетная 99грамм
нагрузка на крыло 27.5 грамм/дм. кв.
скорость еще не менял :)
ЗЫ:
в следующий раз пожалуй соберу вот этого товарища:





Лига RC хобби и моделистов
283 поста1.6K подписчиков
Правила сообщества
Запрещается
1) Оскорблять друг друг
2) Всякого вида реклама