
GeekNews
4 236 постов
•
1 425 подписчиков
0 просмотренных постов скрыто

Продолжение поста «Парни из Канады прицепили к радиоуправлямым тачкам камеры от FPV-дронов и теперь кайфуют, катаясь на них с видом от первого лица»3
Расскажу подробнее про мою постройку, цены и технические детали, раз вопросы в комментариях возникли. Пусть будет ответом на ответ на пост.
Но сначала подпишитесь на мой телеграмм канал.. бла бла бла
Начну с видео. Оно не полевое, так как времени не было снять с улицы, добавлю потом видео именно с покатушек по грязи/холмам.
Для понимания происходящего: VR тем Oculus Quest 3 в режиме "сквозная камера", я вижу что происходит вокруг и в "воздухе" у меня весит экран на который выводится картинка с камеры на машинке. Можно сделать fullscreen как на любых FPV очках, но мне нравится так больше. Размер экрана можно менять на любой удобный.
Абзац предистории: начиналось это хобби в далеком 2003 году, началось с калильный машинок (двигатель на нитрометаноле), потом были и бензиновые масштаба 1:5, теперь только электронный, чтобы жена не выгнала из дома =) были в Самолеты, и вертолеты, потом появились FPV дроны для гонок, потом дроны концерна Калашников... но это уже по работе.
На фото "мои пиздюки" из мира RC


Теперь про сет конвертика и что почему:
1) Шлем VR - 60к почему ок? Он был для игрушек и фильмов в поездках. Ну и оценить VR порно тоже было прям необходимо.
2)Машинка. У меня их две она выбор - погонять или поползать. Поползать Traxxass Summit 1/8 масштаб и HPI Baja Flux 1/5 масштаб. - На фото Summit - 30-40к бу
3)Пульт Radiolink rc8gs - 8к - с али
4)Камера Runcam Wifilink 2 - это камера, приемник и передатчик + Wifi приемник - 5к с али (по скидочке)
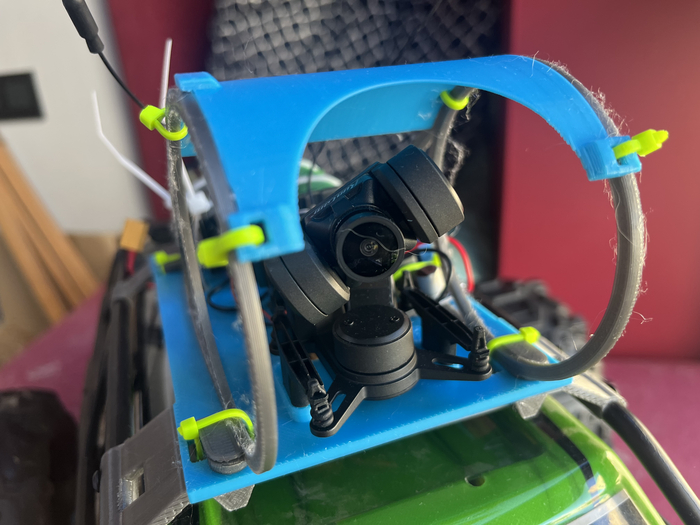
5)подвес caddaxfpv gm-3 - 10к с али
6)2 батареи lipo - 10к (4к бу)
7)Head Traking esp32 - 1к на все.
Вот такой сетап. Все еще дешевле Нивы в состоянии в котором можно на ней ехать в грязь =)
Теперь технические моменты (буду упрощать, уж извините эксперты):
Почему wifilink? Есть несколько типов передачи видео сигнала с камеры на шлем: Аналоговый, Цифровой, Цифровой по Wifi. Аналоговый очень хорош тем, что теряется "постепенно", неплохо проходит стены, но качество картинки низкое, помех многовато). Цифровой. Идеально для прямой видимости, высокое качество (хоть 4к пихай), но, в основном, проприетарные стандарты типо DJI - а значит привяза к их оборудованию. Ну и мой выбор Wifilink. фактически, это открытый протокол передачи картинки по Wifi в спец режиме, который позволяет принимать сигнал на почти любое wifi устройство и выводить его в просмотрщики и браузеры. Для гугления деталей: Wifilink, OpenIPC, Ruby. Поэтому это хороший вариант принимать на VR очки картинку.
Дальность при минимальной мощности комплекта у меня во дворе была в районе 30 метров без особых помех. На машинки хватает с запасом (так как мощьность передатчика можно поднять).
Все это запускается через родное приложение (есть для Win, Mac, Android (на очках VR он)) от Runcam. Или в любом браузере =)
Удобно ли в VR очках по сравнению с очками, например DJI?
- Да, удобно, мне нравится видеть обстановку вокруг, но можно и полное погружение. Но это не Ready to go комплект, нужно немного шаманства, чтобы это все работало. Готовые комплекты проще. Но я за универсальное устройство был.
Как сделан head tracking (на фото и видео он снят):
- Все "просто". На ESP32 установлен гиросп gy-bn0055, и все это прикрепленное к шлему VR. Написана программа, которая превращает все движения головы в PWM сигналы и через разьем для тренера на пульте (это разъем чтобы с двух пультов управлять одной машинкой/самолетом, как дополнительные педали в учебных машинах) передается на приемник в машинке и по двум каналам приемника (всего 7) управляет положением подвеса (вертикаль и горизонталь). Это "чуть" сложнее, чем готовые решения. Желательно уметь в хотя бы вайб-кодинг. Если нужно - поделюсь кодом на гитхабе.
Почему эта машинка а не "вот эта за 2 к с али":
- Потому что она есть и ей много лет. Но это Нива среди RC машинок. Понижай-ка, полный привод, блоки спереди и сзади, низкий центр тяжести. И очень хорошее качество - за пробег больше чем 20акб (пробеги RC машин измеряется в количестве аккумуляторов) ни одно поломки. А поломки это прям важно. У меня был Warhead - нитро тачка, вот она ломалась каждый час. А ремонт - разобрать ее в ноль и собрать обратно. Классно первые два раза.
Как ощущения от назвемки против воздуха в FPV:
- Это очень интересные ощущения. Это реальное погружение в трофи-рейды по лесам, но у вас во дворе/парке. В воздухе драйв и высокая цена ошибки (расскажите это моим вертолетам, которые крушились до состояния "перемолол себя"), на земле это размеренность и стратегия. Но или тоже драйв если тачка быстрая.
+ несколько фото
Пс, парень, есть грязь? А сели найду?
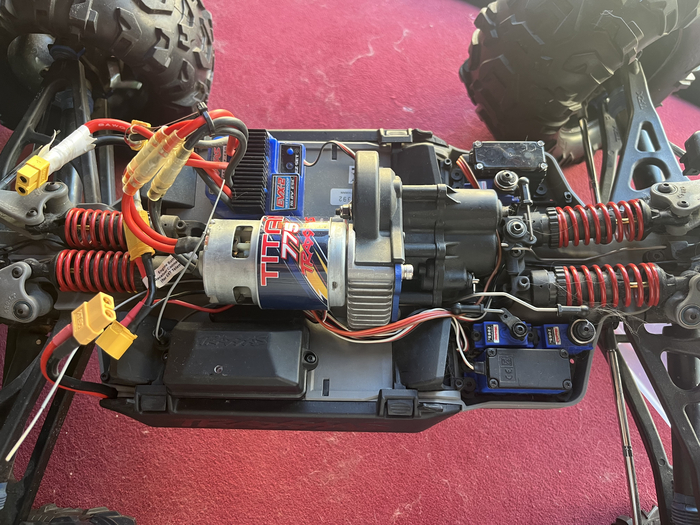
Найди 5 сервоприводов =)
И небольшое видео со второй тачкой для понимания разницы в концепции =)
Тут должна быть ссылка на телеграмм канал или на товары на маркете на али
Показать полностью
4
1
Тони Старк на минималках: россиянин заменил мышку на перчатку с гироскопом
Теперь он управляет компом взмахами руки в воздухе. Всё работает через пару плат и никакой магии.
Уличный инфракрасный газовый обогреватель
Продается такой на Али и на Яндекс Маркете.
Китайские ученые внедрили робота-антилопу в стадо на Тибетском нагорье
Это сделали, чтобы изучать поведение животных, их среду обитания и экологическую ситуацию. Машина так органично вжилась в коллектив, что настоящие антилопы её приняли и не проявляют страха.
Подушка-подставка для планшета
Продается такая на Али и на Яндекс Маркете.
Концептуальный автомобиль Ferrari Modulo, разработанный Паоло Мартином из итальянской студии Pininfarina
Представлен на Женевском автосалоне 1970 года.
Низкий клиновидный кузов со стеклянной крышей в виде козырька, которая выдвигается вперёд, позволяя попасть в салон.
Сиденья в салоне сложены из отдельных подушек, закреплённых прямо на монококе.
Изначально не предназначался для езды: полностью закрытые колёса ограничивали поворот передних шин.
В 2014 году концепт приобрёл Джеймс Гликенхаус, который восстановил машину, адаптировав кузов для реальной эксплуатации — так Modulo впервые поехал самостоятельно.
Показать полностью